惯性导航系统自适应辅助GNSS矢量跟踪方法
2014-01-13李传军彭钟锋李兴城
李传军,彭钟锋,李兴城
(北京理工大学宇航学院飞行器动力学与控制教育部重点实验室,北京100081)
0 引言
全球卫星导航系统(GNSS)全天候提供位置、速度和时间信息,在低成本制导武器上有着广泛应用,但卫星信号功率较低,容易受到无意和有意干扰。通过采用惯性导航系统(INS)辅助GNSS提高跟踪灵敏度,从而提高接收机抗干扰能力,是一种提高INS/GNSS组合导航能力的有效途径。
INS辅助矢量跟踪技术是INS/GNSS 超紧耦合系统的基础。自从1980年Copps E.M.提出了矢量跟踪的概念并认识到其优越性后,许多研究者和机构开始了矢量跟踪以及INS/GNSSS超紧耦合技术 的 研 究,其 中 以Raytheon 公 司[1]、Aerospace公司[2]等为代表提出了自己的基于INS辅助矢量跟踪技术的超紧耦合方法。D.H.Hwang给出了统一结构的超紧耦合系统[3]。国内也广泛开展了矢量跟踪技术及组合导航技术研究,王新龙[4]对超紧耦合系统进行了仿真试验,唐康华等[5]对超紧耦合中的预处理滤波器进行了研究。考虑到低成本制导武器的导航系统特点,为了提高复杂电磁环境下的高动态卫星导航接收机的抗干扰能力,提出了低成本INS自适应辅助GNSS矢量跟踪算法,并给出了预处理滤波器、组合导航滤波器和高动态标量跟踪环路的具体设计方法。
1 INS自适应辅助矢量跟踪结构
考虑到低成本制导武器的INS/GNSS 导航系统一般基于低成本惯性导航系统,导航精度严重依赖卫星导航,在干扰环境下即使载波相位跟踪失锁,只要保证载波跟踪环路的频率锁定和码环路的相位锁定,其导航精度也高于低成本纯惯性导航系统,故提出了基于矢量延迟锁定环和锁频环并级联高动态锁相环(VDFLL+CaPLL)的INS 自适应辅助GNSS矢量跟踪方法,其原理框图见图1。
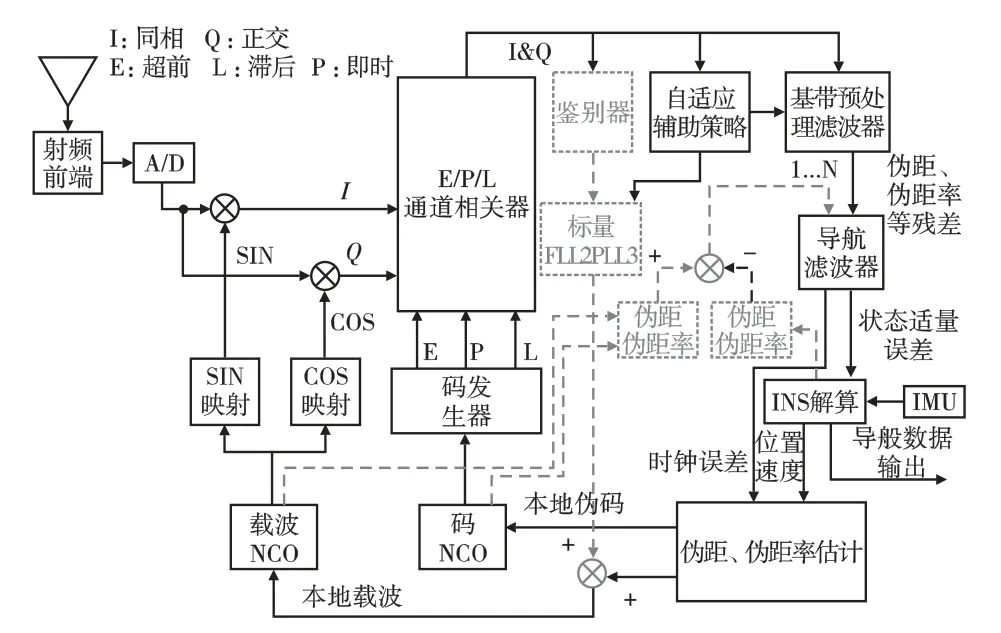
图1 INS自适应辅助GNSS矢量跟踪方法的原理框图Fig.1 INS-aided GNSS adaptive vector tracking
该方法根据自适应辅助策略,切换基于二阶锁频环辅助的高动态三阶锁相环的标量跟踪环路和基于基带预处理滤波器和组合导航滤波器的INS辅助矢量跟踪环路。在矢量跟踪情况下,该方法采用了联邦滤波结构,先对各通道信号进行基带预处理滤波,然后输入给组合导航滤波器,通过校正后的INS解算结果对环路NCO 进行控制,实现跟踪环路闭合。在标量跟踪情况下,采用了跟踪环路的伪距和INS估计的伪距求差作为伪距残差以及相同方法计算的伪距率残差,同矢量跟踪通道预处理滤波器输出的伪距残差和伪距率残差一起作为观测量输入到导航滤波器,解决了标量跟踪环路和矢量跟踪环路的导航解算的统一。
2 INS 自适应辅助矢量跟踪设计与实现
2.1 基带预处理滤波器的分析与设计
基带信号预处理滤波器技术可采用直接非相干累加法、多项式拟合法、基于鉴别器的Kalman滤波法和基于非线性测量的EKF 滤波法等[6]。考虑到目前处理器的发展水平,鉴于联邦滤波型超紧耦合结构的运算量更适合目前FPGA+DSP 架构的接收机硬件系统,本文采用了基于鉴别器的Kalman滤波法的一种改进的预处理方法,该方法通过对I和Q 数据进行转化处理,便于建立噪声模型,可估计测量噪声,有利于Kalman滤波器的最优估计。
采用伪距、伪距率和伪距加速度的残差作为状态变量,则预处理卡尔曼滤波器的状态方程为:
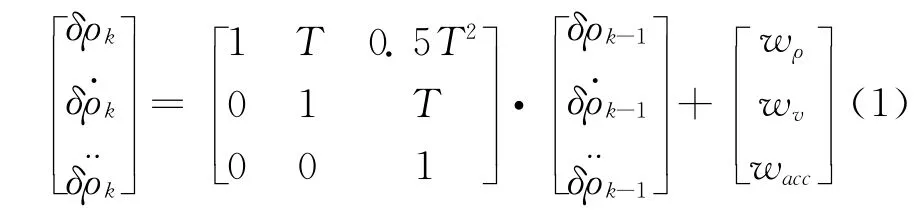
式(1)中,wρ为伪距残差随机游走,wv为伪距率残差随机游走,wacc为伪距加速度残差随机游走。
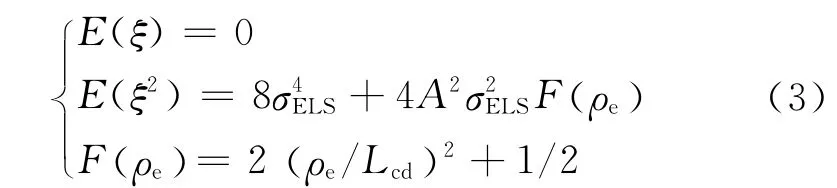
采用基于非线性测量的EKF 滤波法,保留了I和Q 支路数据的加性高斯白噪声的噪声特性,更适合Kalman滤波器的要求,但运算量较大,且估计的相位误差存在载波周模糊度,当存在干扰造成跟踪误差较大时,存在的周模糊度误差更大。本文采用的低运算复杂度I和Q 数值非线性变换处理,可实现无偏伪距残差估计,计算公式如下[7]:

其中,Ak为I和Q 的信号幅度,ρe,k 为检测的伪距误差,Lcd为1个码片对应的距离,ξ为测量噪声,其均值和协方差为[7]
信号幅度Ak模型为

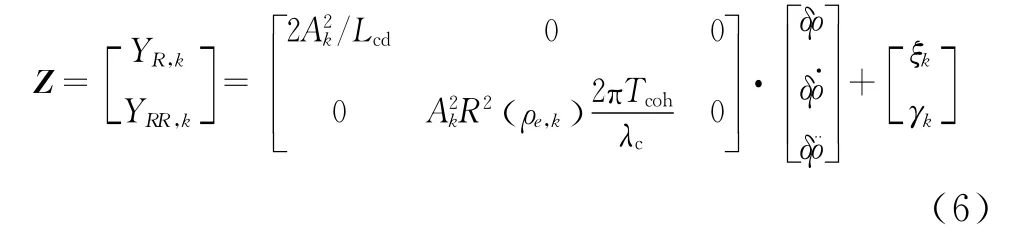
伪距率残差估计采用叉积频率鉴别器方法为[7]:

其中,Tcoh为相干积分时间,λc为载波的波长,γ为测量噪声。
由式(2)和(5)可知,预处理滤波器的量测方程为:
2.2 超紧耦合组合导航滤波器设计
超紧耦合的导航滤波器可借鉴紧组合的导航滤波器,其推导过程与紧组合导航滤波器的推导过程类似[6]。GNSS的误差状态主要是与接收机本地时钟误差有关,在紧组合建立的GNSS的误差模型基础上扩展时钟加速度漂移,则GNSS误差模型为:
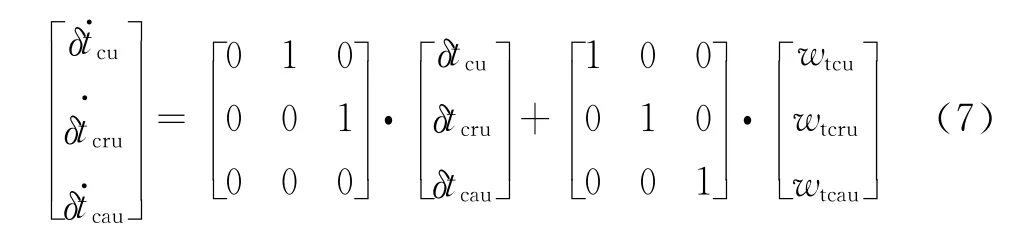
其中,wtcu为时钟误差等效距离误差的驱动噪声,wtcru为时钟漂移等效速度误差的驱动噪声,wtcau为时钟漂移等效加速度误差的驱动噪声。
超紧耦合系统的导航滤波器的状态方程是由INS系统误差模型和GNSS系统误差模型组成的,组合滤波器状态方程为
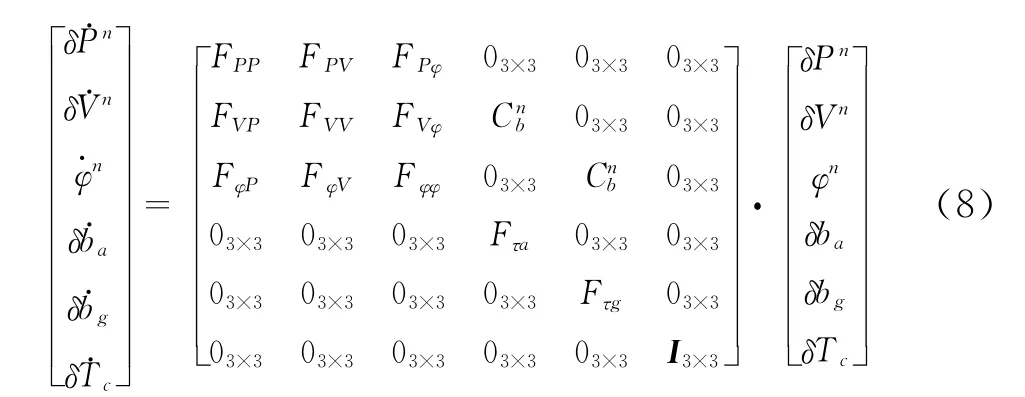
其中,Cnb为载体坐标系到导航坐标系转换的方向余弦,I3表示3 3单位矩阵,F 参数参考文献[6]。
当卫星处于矢量跟踪状态时,超紧耦合系统的量测方程的测量值是预处理滤波器输出的伪距残差、伪距率残差和伪距加速度残差;当卫星处于标量跟踪状态时,采用标量跟踪环路的伪距和INS估计的伪距求差作为伪距残差以及相同方法计算的伪距率残差,与矢量跟踪状态的观测量统一。M 个卫星参与导航滤波处理的测量方程为:
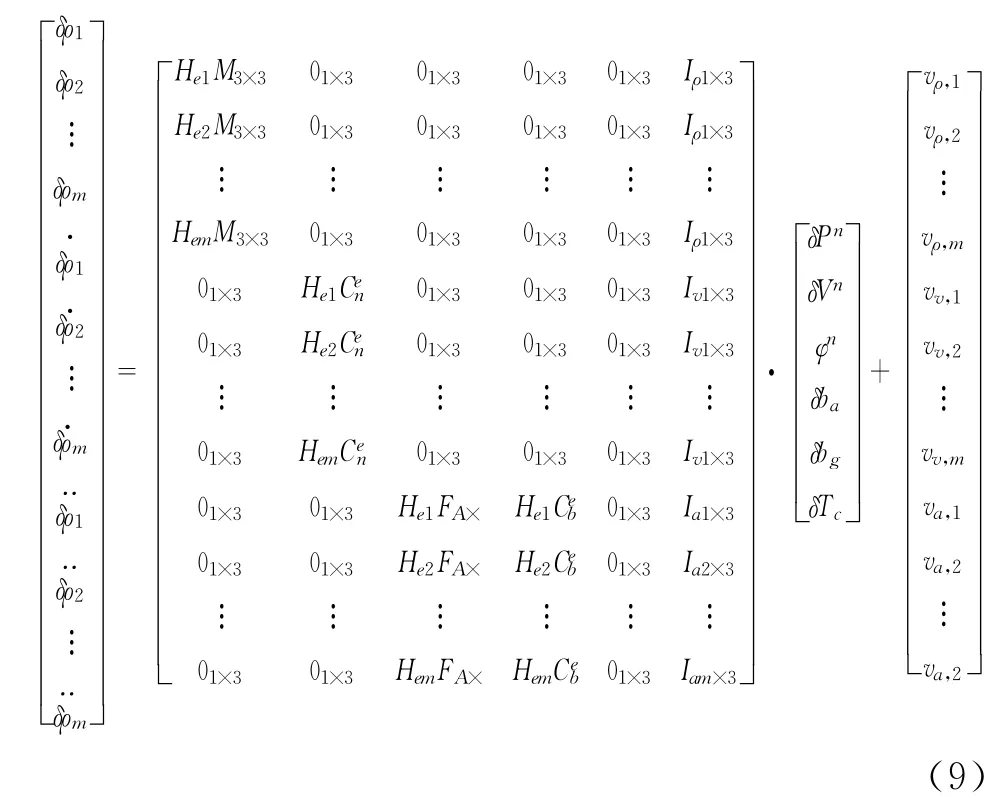
其中,vρi,vvi,vai(i=1,2,…,m)分别为GNSS接收机伪距、伪距率以及伪距加速度测量噪声。He1、M3×3等参数参考文献[6]。
2.3 高动态标量跟踪环路设计
高动态标量跟踪环路采用二阶FLL 辅助三阶PLL实现卫星信号的初步环路跟踪,在不同干扰环境和动态条件下,根据载体的动态特性和跟踪状态自适应调节环路的结构和阶数,在纯锁相环下实现最优带宽高精度标量跟踪。
基本的二阶锁频环辅助三阶锁相环的环路滤波器部分如图2所示,环路滤波器输出为:
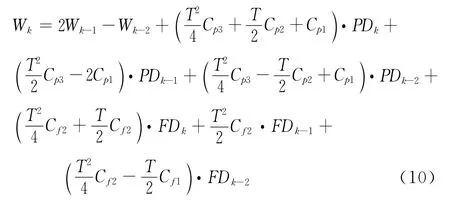
式(10)中,Wk表示当前时刻滤波器输出,Wk-1表示上一时刻滤波器输出,Wk-2表示上一时刻的前一时刻的滤波器输出,T 表示锁相环预积分时间,FD 表示锁频环鉴频器输出,C 表示图2中的环路滤波系数,即为
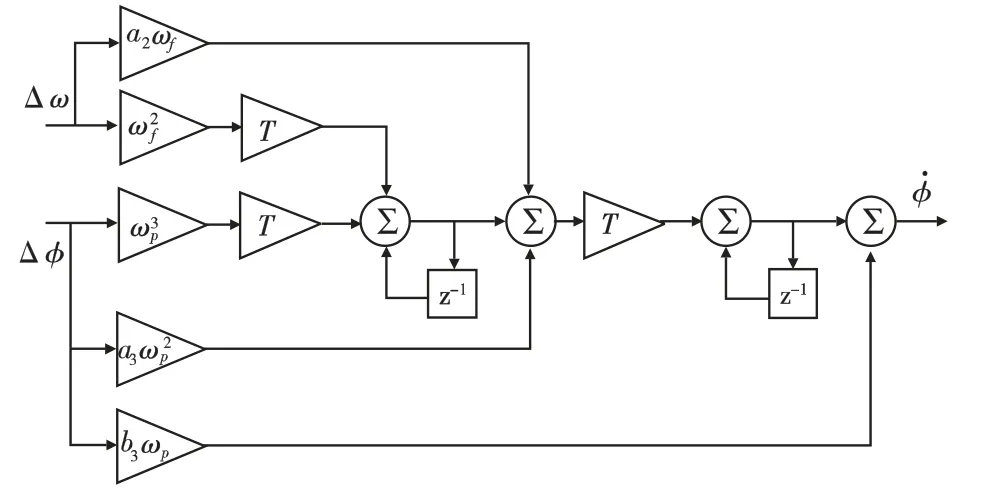
图2 二阶FLL辅助三阶PLL的滤波器方框图Fig.2 The filter with second-order FLL-aided third-order PLL
当环路处于纯PLL的状态时,采用最优带宽跟踪。对于三阶PLL,1σ经验跟踪阈值为[8]:

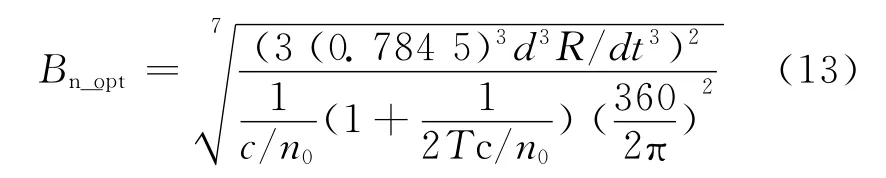
当载波环路处于锁定状况下,可以实时估计C/N0和动态应力d3R/dt3。优化环路带宽的目的是选择合适的Bn,使总的PLL跟踪环测量误差σPLL达到最小,由以下公式可计算最优带宽[8]。

则三阶锁相环的最优带宽为
2.4 INS自适应辅助跟踪环路的实现
基于INS辅助矢量跟踪的超紧耦合系统,采用了自适应辅助跟踪算法和可配置跟踪环路结构,如图1所示。该算法根据环路锁定情况,采用一定的切换策略,自适应切换高动态标量跟踪环路和INS辅助矢量跟踪环路。当处于高动态标量跟踪环路的情况下,根据载体的动态特性和跟踪状态自适应调节环路的结构和阶数,实现低干扰环境下的纯锁相环跟踪的高精度导航和中等干扰环境下INS辅助矢量跟踪,从而在满足一定导航精度情况下实现最大的导航能力。
INS自适应辅助跟踪环路的策略如下:
步骤1:采用二阶FLL辅助三阶PLL实现卫星信号的初步的跟踪环路锁定。
步骤2:根据INS估计的视距加速度和加加速度以及跟踪状态自适应调节环路的结构和阶数。
步骤3:根据估计的视距动态应力参数和信号的C/N0计算最优带宽,自适应调节环路带宽。
步骤4:根据信号的C/N0(目前阈值设定为32 dB-Hz)和载体的动态特性(目前加速度阈值设定为10 g)判断是否需要进行INS辅助矢量跟踪环路,信号质量较高且动态性能较低时返回到步骤2,否则进入步骤5。
步骤5:根据观测量性能指示器、信号的C/N0及组合导航滤波器的工作状态等参数确定是否采用INS辅助矢量跟踪,如果INS辅助矢量跟踪性能良好则进入步骤6,否则环路失锁,进行重捕获。
步骤6:根据估计的卫星伪距和伪距率,控制本地码环NCO 和载波环NCO。
步骤7:返回步骤4。
组合导航滤波器估计出状态误差后实时校正INS系统。基于INS 解算模块输出的载体位置和速度,以及卫星星历计算出的卫星位置和速度,可估计卫星的伪距和伪距率,用于控制环路NCO,从而实现INS辅助矢量跟踪。
3 高动态仿真试验验证
3.1 飞行轨迹及参数设置
本 文 采 用Spirent Communications 公 司 的GSS7700GPS/SBAS 卫星信号模拟器,设计了理想的6DOF弹道模型的飞行轨迹,用来验证基于INS辅助GNSS矢量跟踪算法。飞行轨迹采用类似于火箭弹6DOF弹道模型,为了简化试验设计并未准确考虑实际飞行中的空气动力学问题。图3给出了飞行过程中的高程和东北天加速度曲线。

图3 理想的飞行轨迹Fig.3 Theory flight path
目前对卫星导航的恶意干扰分为欺骗性干扰和压制性干扰。压制性干扰又包括窄带干扰和宽度干扰。本文提高抗干扰能力主要是提高抗压制性干扰的能力。不管窄带干扰和宽度干扰,其干扰的本质是增加信号的干信比,达到接收机无法跟踪甚至射频前端饱和的目的,而导致接收机不能导航定位。为了方便模拟中等宽带干扰环境,采用噪声功率不变、降低信号强度的方法,从而达到增加干信比,飞行过程中卫星信号强度逐渐衰减。模拟器仿真GPS L1C/A 卫星信号,图4给出了当时GPS卫星分布和卫星SV13的信号载噪比。利用6DOF弹道模型获得理论IMU 数据,数据采样率为100Hz,通过建立加速度计和陀螺误差模型,产生不同精度等级IMU 数据。本文选择参考文献[9]给出的低成本惯导的DIGNU-1 误差模型,其中陀螺漂移为75(°)/h,加速度计零偏为9mg。
3.2 传统独立式高动态跟踪试验
独立式高动态接收机基于三阶锁相环的高动态环路跟踪技术,设定锁频环相干积分时间为10 ms和锁相环的相干积分时间为20 ms,在卫星信号有效跟踪的情况下,保持载波环的相位锁定,确保高精度的伪距测量。图5给出了卫星SV13、SV20、SV21和SV22的环路跟踪的C/N0,由图分析,独立式高动态三阶锁相环的卫星失锁门限约为27dB-Hz。
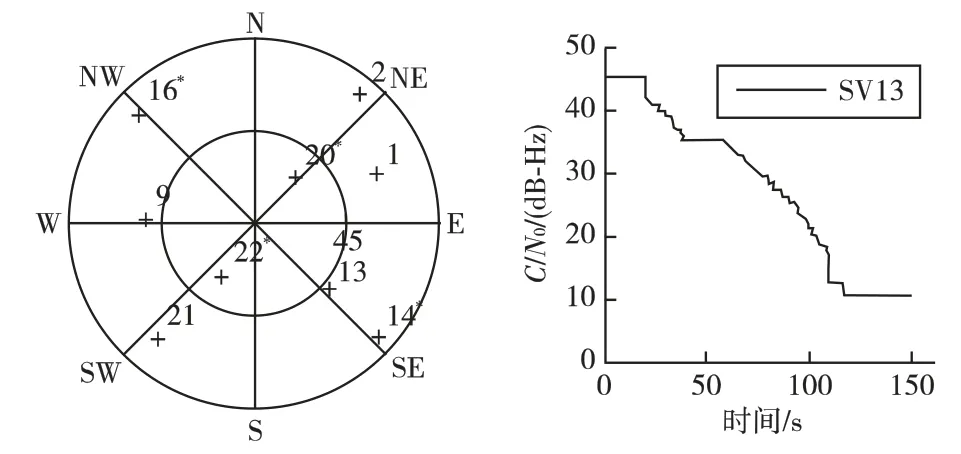
图4 卫星分布情况和卫星13的载噪比Fig.4 Thesky plot of satellites and the carrier-to-noise of SV13

图5 PLL跟踪的卫星C/N0Fig.5 The C/N0of PLL-tracking satellites
3.3 INS辅助矢量跟踪试验
基于INS辅助矢量跟踪的超紧耦合系统(以下简称UTC)以矢量跟踪为基础,通过INS的导航结果控制载波环路和码环路的NCO,实现卫星信号的跟踪。图6给出了卫星SV13、SV20、SV21和SV22的环路跟踪的C/N0。
图7给出了122~126s期间SV13的环路跟踪相关参数,包括基带测量的载噪比C/N0、频率鉴别器的输出FLLDisc、预处理滤波器输出的伪距率残差PRDotErr、鉴频器输出的频率误差数据的统计值Data Statistics,其中std表示1σ的频率误差。在此期间,信号的C/N0在1 5dB-Hz附近,1σ的频率误差为52.9Hz。
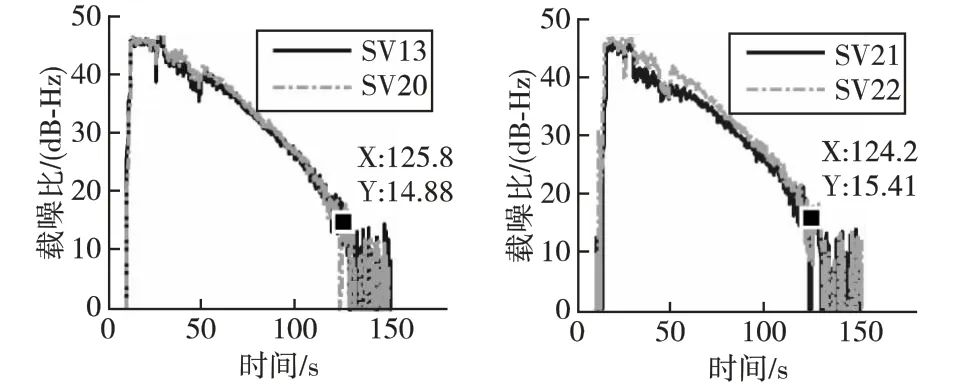
图6 UTC跟踪的卫星C/N0Fig.6 The C/N0of UTC-tracking satellites

图7 UTC环路跟踪状态相关参数(122~126s)Fig.7 UTC loop tracking status
图8给出了基于INS 辅助矢量跟踪的组合导航系统的导航速度和位置误差。由图8可知,飞行约124s后导航误差明显上升,结合全程测量的C/N0说明此时卫星逐渐失锁,综合考虑图7的分析结果,表明INS辅助GNSS矢量跟踪的卫星失锁门限在15dB-Hz附近。从图7可知,此时FLL 的频率误差已远超过传统失锁门限16.7 Hz,这表明传统的失锁门限不适合超紧耦合的卫星跟踪性能评价,如何有效评价INS辅助矢量跟踪的卫星跟踪性能有待于进一步研究。
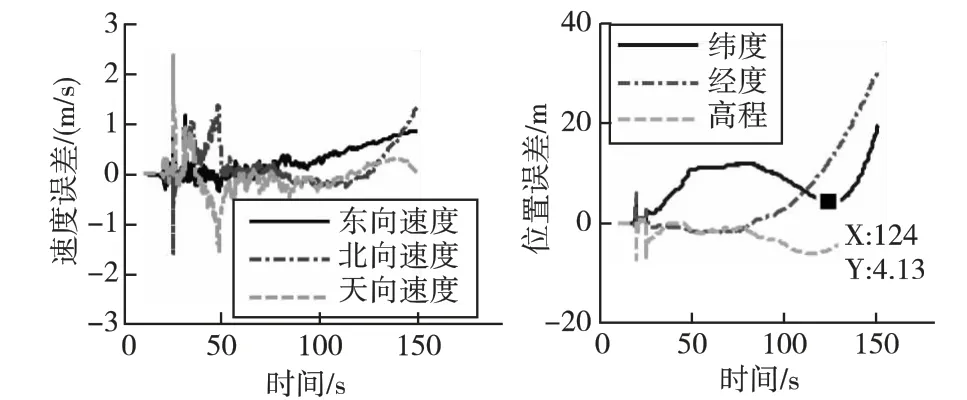
图8 基于UTC的组合导航的速度和位置误差Fig.8 The speed and position error of UTC-based navigation
4 结论
本文提出了低成本INS自适应辅助GNSS 矢量跟踪方法,该方法根据观测量性能指示器、跟踪环路锁定情况和卫星信号信噪比等,自适应切换高动态标量跟踪环路和INS辅助矢量跟踪环路,实现低干扰环境下的高精度导航和中等干扰环境下满足导航精度情况下的最大导航能力。文中建立了INS/GNSS超紧耦合滤波模型,给出了INS辅助矢量跟踪环路的具体实现方法。动态仿真试验结果表明,在高动态干扰环境下传统独立式高动态接收机可跟踪载噪比为27dB-Hz的GPS L1C/A 卫星信号,而基于INS辅助矢量跟踪的超紧耦合系统导航性能有明显的提高,可跟踪最小载噪比为15dB-Hz,其抗干扰能力提高了约12dB。
[1]Horslund J M,Hooker J R.Increase jamming immunity by optimizing processing gain for GPS/INS systems[P].US:No.5983160,1999.
[2]Abbott A S,Lillo W E.Global positioning systems and inertial measuring unit ultratight coupling method[P].US:No.6516021,2003.
[3]Hwang D H,Lim D W,Cho S L,et al.Unified approach to ultra-tightly-coupled GPS/INS integrated navigation system[J].Aerospace and Electronic Systems Magazine,2011,26(3):30-38.
[4]王新龙,于洁.基于矢量跟踪的SINS/GPS深组合导航方法[J].中国惯性技术学报,2009,17(6):710-717.
[5]郭瑶,吴文启,唐康华,等.北斗/INS 深耦合接收机基带滤波器设计[J].中国惯性技术学报,2013,21(1):71-75.
[6]李传军.INS辅助高动态卫星导航接收机关键技术研究[D].北京:北京理工大学,2013.
[7]Steven B.Alexander.System and Method for GPS Acquisiton Using Advanced Tight Coupling [P]:US:7,415,354B2,2008.
[8]Li C J,Yang S X.Optimization of the carrier tracking loop for GPS high dynamic receivers[J].Journal of Beijing Institute of Technology,2012,21(2):164-171.
[9]Ohlmeyer E J.Analysis of an ultra-tightly coupled GPS/INS system in jamming[C]//IEEE/ION,Position,Location,and Navigation Symposium.San Diego,California:IEEE,2006:44-53.