激光雷达测量技术的进展与应用
2013-12-31易恒
易 恒
(天津市市政工程设计研究院,天津 300201)
1 概述
激光雷达(Light Detection and Ranging,LiDAR)能快速获取地表地物高度数据和浅水水域深度,是从21世纪60年代发展起来的一种先进的遥感测量技术。激光雷达根据传感器搭载平台的不同,可以分为地基、机载和星载激光雷达系统。无论哪种测量系统,原理上都是通过发射高重复频率的激光脉冲和捕获返回信号,通过时间差来计算地物的高度信息。
作为一种主动遥感测量手段,机载LiDAR受到了越来越多的重视。机载LiDAR具有机动性强、高效、实时的优点,不易受到较迅速变化的气候条件和光照、云层的影响,分辨率高,不需要或很少需要人进入测量现场,不需要大量地面控制点,作业安全。对于沼泽、湿地等危险地区和声纳技术难以测量的海岸沿线以及使用航空摄影测量方法获取地形模型有困难的森林和沙漠地区,Li-DAR系统提供了一种直接高效的快速测量手段。德国测量局通过成本效益分析计算表明:用机载LiDAR技术实现测量的成本仅为航空摄影测量成本的25%~33%(Petzold,Reiss et al.1999;Mitasova,Mitas et al.2005)。地球地表地形复杂的山脊、沟谷、森林覆盖地区、沙漠、湿地等众多,而世界海洋中约有7×1 012 m2的深度在30 m以内,使得机载LiDAR测量技术有巨大的应用潜力和广阔的发展前景。
2 激光雷达系统组成
根据雷达系统的数据记录方式的不同,获取的雷达数据有点云和波形两种形式(见图1)。波形记录方式将返回的信号每间隔一定时间全部记录下来,从而能完整地反映地物剖面信息。相反,点云记录方式只是记录特定的几个返回信号,有可能丢失部分重要的垂直信息。由于受能量的限制,波形记录的LiDAR一般都是大光斑,从10 m~70 m不等,近来也有一些小脚印光斑的波形记录 LiDAR 问世(Wagner,Ullrich et al.2006;Wagner,Hollaus et al.2008)。最具有代表性的三个波形记录 LiDAR是 SLICER(Scanning Lidar Imager of Canopies by Echo Recovery),LVIS(Laser Vegetation Imaging Sensor),GLAS(Geosciences Laser Altimeter System)。其中GLAS是星载激光雷达,于2009年停止工作。SLICER和LVIS是机载的,SLICER也已停用,LVIS是美国宇航局在发射搭载GLAS平台的ICESAT卫星之前用于机载测试使用,在美国和拉美有很多次飞行,其数据免费提供给全球用户使用。
尽管波形记录方式LiDAR有很多优势,但是在实际应用中,点云数据同样能满足应用需求。目前,激光传感器的主要提供商有四家:Optech(http://www.optech.ca/),Toposys(http://www.trimble.com/imaging/),Leica(http://www.leica-geosystems.us/en/index.htm)和Riegl(http://www.riegl.com/)。在实际应用中,需要根据仪器的具体参数,考虑飞行高度、飞行速度、扫描频率、脉冲频率、最大扫描视场角等参数设置。表1给出了常用的点云记录LiDAR飞行技术参数。随着20世纪以来激光技术的迅猛发展,由于表1给出的这些传感器自身的局限性,如较小的视场角对幅宽的限制等,一些新的传感器呼之欲出,性能大大超过了之前这些传感器。表2列出了一些新型的传感器及其飞行技术参数。这些先进的商用激光传感器为激光测绘提供了更高精度的数据。
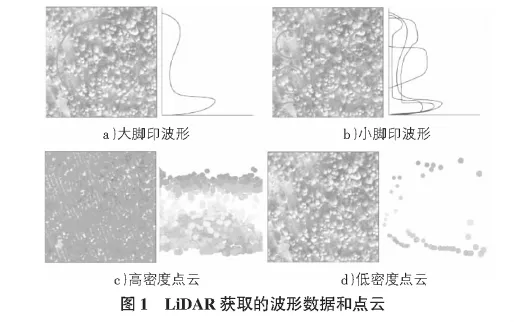

表1 经典LiDAR传感器及其飞行参数
不管哪类激光传感器,机载激光雷达系统都由三部分组成:激光器(Laser),用于激光测距;惯性导航系统(INS,Inertial Navigation System),用于记录飞行平台的倾斜、移动、偏航等姿态信息;卫星定位系统,如美国的GPS(Global Positioning System),俄罗斯的GLONASS(Global Navigation Satellite System),用于记录位置信息。三大系统的结合为精确的计时和距离测量提供了技术支撑(Lefsky,Cohen et al.2002)。实际上,正是由于激光、惯性导航和全球定位技术的发展促成了激光雷达测高技术的迅猛发展(Lim,Treitz et al.2003)。
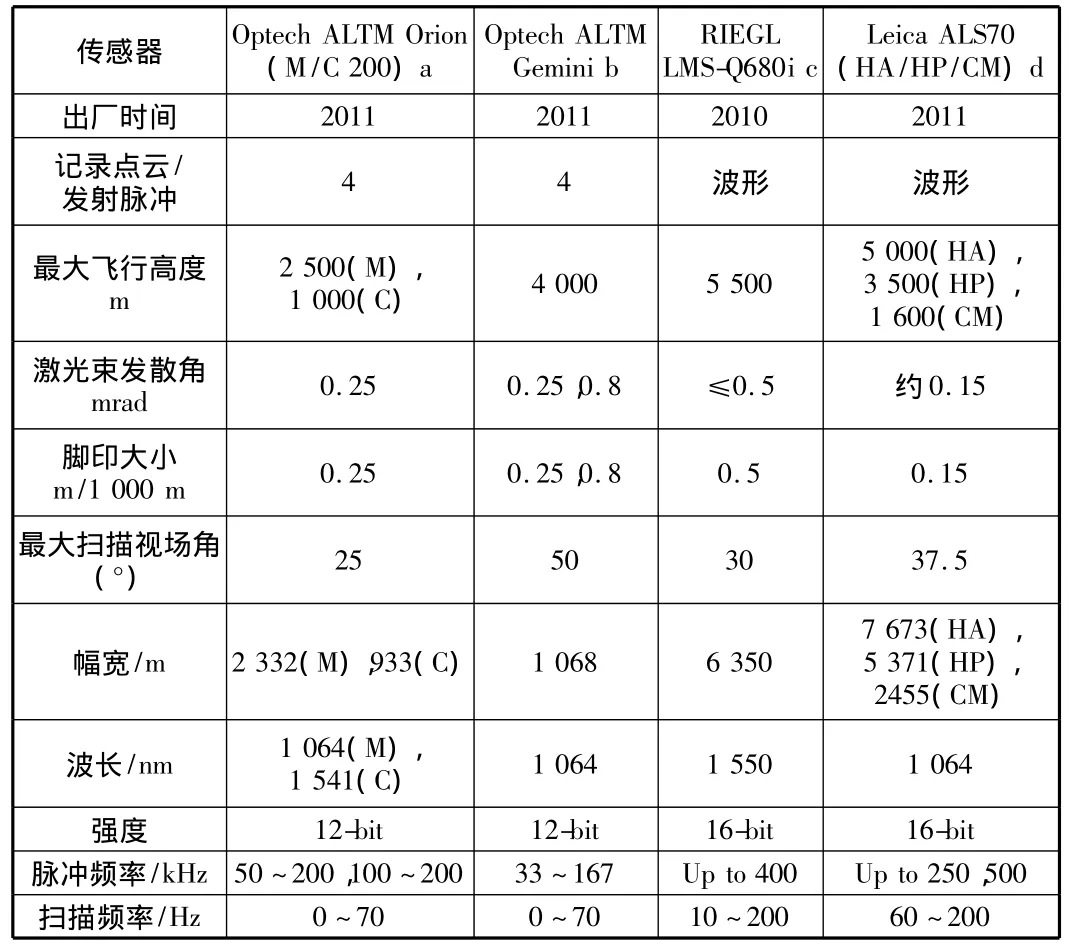
表2 新型LiDAR传感器及其飞行参数
3 激光雷达技术应用
伴随着硬件和软件的发展,激光雷达在各种领域取得了成功的应用(Kotchenova,Song et al.2004;Hinsley,Hill et al.2006;Hopkinson,Popescu et al.2007;Wang and Philpot 2007)。其主要应用于:地形制图、城市三维制图、道路工程建设、电力巡线、森林生态参数制图等。
3.1 地形制图
LiDAR在地形测图方面的应用非常广泛。测图界越来越达成一个共识,那就是LiDAR将成为获取DEM(数字高程模型)和DTM(数字表面模型)的另一种选择,它的垂直精度能够达到15 cm~100 cm(Yang 2005)。天津市市政工程设计研究院在海南省文琼高速公路项目中利用LiDAR技术完整地获取了近100 km2测区的DEM和DTM,基本满足了设计人员的数据需求,如图2所示。

3.2 城市三维制图
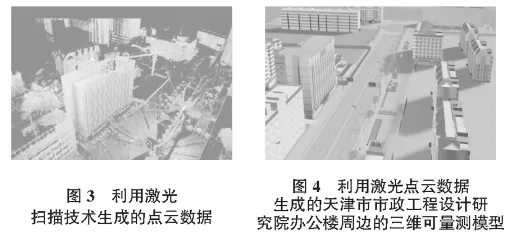
城市三维制图被认为是激光雷达数据的主要应用之一(Murakami,Nakagawa et al.1999)。激光雷达所能产生的表面模型在城市数字正射影像的生成(Maas and Vosselman 1999)、三维建筑重建、城市建模和城市空气污染研究等方面都有广泛应用(Sampath and Shan 2007;Sohn and Dowman 2007)。在城市三维制图方面,研究的主要热点包括城市数字高程模型提取,城市数字高程模型对提取地表特征信息如建筑物高度有直接影响,还能为城市规划、洪水控制、旅游等提供信息(Cobby,Mason et al.2001;Webster,Forbes et al.2004;Raber,Jensen et al.2007)。如图 3,图 4 所示,用激光雷达数据生成的天津市市政工程设计研究院办公楼周边的三维可量测模型。
3.3 道路工程建设
通过激光雷达获取的地面三维高程信息能够使决策者对于道路规划区域的环境有一个清晰的了解,在此基础上进行道路的选线,土方工程量的估算以及周边环境的风险评估等(Toth and Grejner-Brzezinska 2006)。激光雷达方法较常规所采用的差分GPS、全站仪和摄影测量方法在性能价格上具有很大的优势,且效率大为提高(Clode,Rottensteiner et al.2007)。
3.4 电力巡线
美国、加拿大、西欧很多国家20世纪80年代以来开始把此项技术应用到直升机电力巡线系统中(McLaughlin 2006)。一些大的电力营运公司利用激光雷达技术对电力线路通道走廊进行GPS定位、激光三维空间扫描,能准确测定通道走廊的三维空间图像,给出定位尺寸,可用于线路勘测、老线路最新立体走向图的绘制和线路对地安全距离的监测,达到选线、建立线路微机台站和防止树枝碰线等目的。
3.5 森林生态参数制图
激光雷达技术在林业上的应用,尤其是在林木高度测量和林分的垂直结构信息获取方面,国外已经取得了大量成功的研究(Hill and Thomson 2005;Moffiet,Mengersen et al.2005;Wynne 2006;Naesset and Nelson 2007)。
4 结语
从世界上第一台三维激光扫描仪的问世以来,三维激光扫描技术已经走过了十几年的历程;它是继GPS之后,测绘行业在技术上的又一次飞跃。在十几年的发展历程中,三维激光扫描技术无论是在硬件设施上,还是在应用领域上,都在快速不断的向前发展。如今,三维激光扫描技术已经成为空间数据获取的重要技术手段,使我们从传统的人工单点数据获取变为连续自动数据获取,不仅提高了观测的精度和速度,而且使数据的获取和处理朝智能化和自动化方向发展。
在西方发达国家,激光扫描甚至已经成为一种主流的测绘方法——它已被60%的英国测量公司用于生成2D和3D的线性或几何目标:如道路,建筑物,结构体或其他几何目标。激光雷达测量技术的发展与应用将为设计人员提供更为精确的三维空间数据,并促进相关技术发展与进步。
[1] Barbier,N.,C.Proisy,et al.(2011).“Bidirectional texture function of high resolution optical images of tropical forest:An approach using LiDAR hillshade simulations.”Remote Sensing of Environment,2008,115(1):167-179.
[2] Clode,S.,F.Rottensteiner,et al.(2007).“Detection and vectorization of roads from lidar data.”Photogrammetric Engineering and Remote Sensing,2009,73(5):517-535.
[3] Kotchenova,S.Y.,X.D.Song,et al.(2004).“Lidar remote sensing for modeling gross primary production of deciduous fore-sts.”Remote Sensing of Environment,2009,92(2):158-172.
[4] Lefsky,M.A.,W.B.Cohen,et al.(2002).“Lidar remote sensing for ecosystem studies.”Bioscience,2010,52(1):19-30.
[5] Lim,K.,P.Treitz,et al.(2003).“LiDAR remote sensing of forest structure.”Progress in Physical Geography,2010,27(1):88-106.
[6] Moffiet,T.,K.Mengersen,et al.(2005).“Airborne laser scanning:Exploratory data analysis indicates potential variables for classification of individual trees or forest stands according to species.”Isprs Journal of Photogrammetry and Remote Sensing,2009,59(5):289-309.
[7] Toth,C.K.and D.Grejner-Brzezinska(2006).“Extracting dynamic spatial data from airborne imaging sensors to support traffic flow estimation.”Isprs Journal of Photogrammetry and Remote Sensing,2010,61(3):137-148.
[8] Wagner,W.,M.Hollaus,et al.(2008).“3D vegetation mapping using small-footprint full-waveform airborne laser scanners.”International Journal of Remote Sensing,2008,29(5):1433-1452.
[9] Wang,C.K.and W.D.Philpot(2007).“Using airborne bathymetric lidar to detect bottom type variation in shallow waters.”Remote Sensing of Environment,2007,106(1):123-135.
[10] Yang,X.J.(2005).“Use of LIDAR elevation data to construct a high-resolution digital terrain model for an estuarine marsh area.”International Journal of Remote Sensing,2009,26(23):5163-5166.
