柔性车身半挂汽车列车侧倾模型的建立与仿真分析
2013-12-14杨鄂川邓国红
欧 健,李 伟,张 勇,杨鄂川,邓国红
(重庆理工大学 重庆汽车学院,重庆 400054)
半挂式汽车列车因其具有装载量大、运输成本低的特点而成为公路运输的主要车型,同时也对半挂式汽车列车的性能提出了更高的要求。半挂汽车列车由于重心位置高、轮距相对于车身高度过窄,因此在转向行驶时其侧倾稳定性较差,大幅度的转向或换道等操作都会使车辆的横向载荷转移迅速增大而发生侧翻[1]。当列车临近侧翻时,由于驾驶员位于车辆前部,经常意识不到侧翻的发生,无法做出必要的响应。而且半挂汽车列车的质量大、惯性也比较大,一旦在公路上出现侧翻失稳的情况,很容易波及到其他正常行驶的车辆,造成恶性连环事故。因此,提高半挂汽车列车的侧倾稳定性,防止侧翻的发生,对于公路安全有着很大的意义[2-4]。目前,国外对半挂汽车列车做了很多研究,包括采用车辆预警系统[5]、主动转向技术[6]、差动制动[7]或主动半主动悬架[8-11]等方式提高半挂汽车列车的侧倾稳定性,防止侧翻。国内对半挂汽车列车也有所研究,建立了刚性车身模型,所采用的方法也基本同国外类似,并取得一定成果[12-16]。
本文针对半挂汽车列车,为防止侧翻的发生,建立了柔性车身的半挂汽车列车的数学模型,并在Matlab/Simulink中建立了车辆的仿真模型。分析了在转向盘角阶跃输入下,不同车速与车辆的结构参数对载荷转移的影响,研究了半挂汽车列车的结构参数与侧倾稳定性的关系。
1 半挂汽车列车动力学模型
由于汽车的俯仰与垂直运动对其侧翻的影响较小,因此建模时将其忽略。将车的质量分为簧载质量与非簧载质量,之间通过悬架相连。其中非簧载质量又分为前轴(转向轴)与集中后轴(驱动轴)质量,并近似假设非簧载质量质心位于侧倾轴上。
同时考虑到车身的扭转对侧倾的影响,将簧载质量根据轴荷的分布分为前后2个部分,将车身看作一个简单的可以扭转的柔性体,之间用扭转弹簧连接,其刚度、阻尼符合车身的扭转刚度、阻尼。
半挂汽车列车中牵引车与半挂车通过连接处(第5轮)连接,利用它传递一定力与力矩。
坐标系O'X'Y'Z'如图1所示,其中:O'为汽车静止时质心铅垂线与侧倾轴的交点;过O'点以车辆的前进方向为X'轴,近似作为侧倾轴,前进方向为正;Y'轴平行于地面,向右为正;过O'点的垂直方向为Z'轴,向下为正。
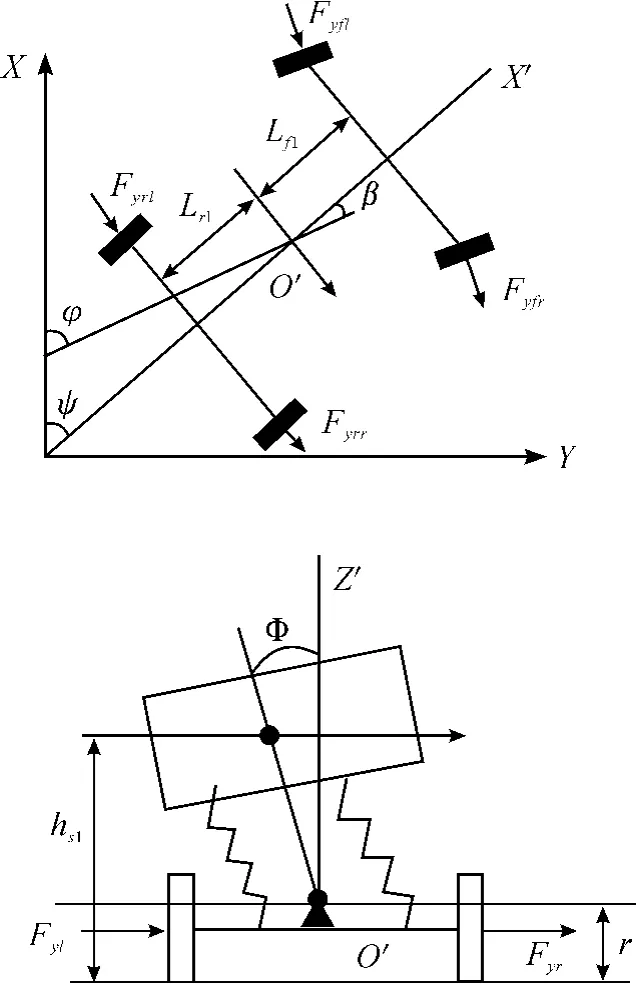
图1 半挂汽车列车坐标系
1.1 牵引车模型
沿Y'轴力平衡:
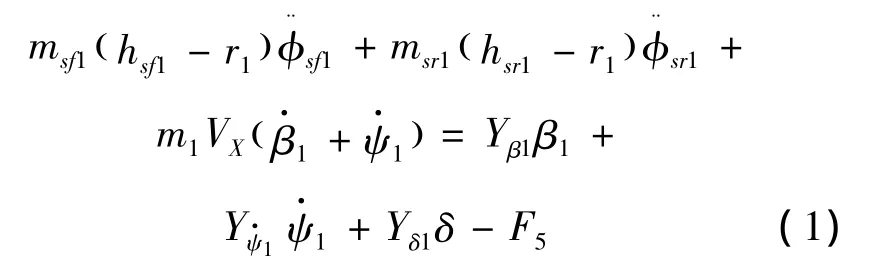
绕Z'轴转动:
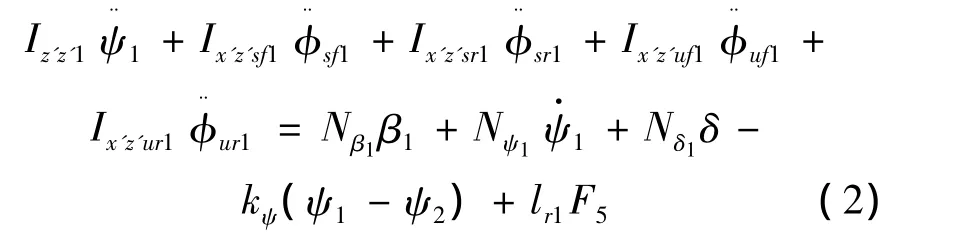
前簧载质量绕X'轴转动:
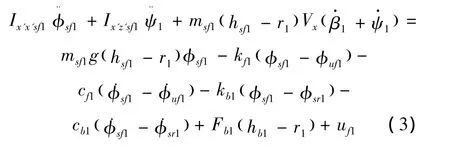
后簧载质量绕X'轴转动:
前非簧载质量绕X'轴转动:
后非簧载质量绕X'轴转动:

1.2 半挂车模型
沿Y'轴力平衡:

绕Z'轴转动:
前簧载质量绕X'轴转动:
后簧载质量绕X'轴转动:
前非簧载质量绕X'轴转动:
1.3 第5轮处的运动学约束方程
其中:
其中:ms表示簧载质量;mu表示非簧载质量;m表示总质量(簧载质量+非簧载质量);hs表示簧载质量的质心离地高度;hu表示非簧载质量的质心离地高度;h5表示连接处离地高度;r表示侧倾轴离地高度;φs表示簧载质量侧倾角;φu表示非簧载质量侧倾角;VX表示速度;β表示质心侧偏角;ψ表示横摆角;δ表示转向角;Ix'x'表示绕侧倾轴的转动惯量;Iz'z'表示横摆转动惯量;Ix'z'表示侧倾-横摆转动惯性积;Lf表示整车质心与前轴距离;Lr表示整车质心与后轴距离;k表示悬架的侧倾刚度;kt表示轮胎的侧倾刚度;ka表示轮胎的侧偏刚度;kb表示车身的扭转刚度;kψ表示连接处得侧倾刚度;c表示悬架的侧倾阻尼;ct轮胎的侧倾阻尼;cb表示车身的扭转阻尼;cψ表示连接处得侧倾阻尼;F5表示第五轮处力;1表示牵引车;2表示半挂车;f表示前轴;r表示后轴。
1.4 非线性轮胎
考虑到轮胎的非线性对操纵稳定性的影响,建立了简单的非线性轮胎模型。轮胎的侧偏刚度Fy/a根据垂直载荷Fz的变化呈非线性变化:

式中C1与C2是2个常量。此方程广泛用于重型车的仿真研究,适用于直到发生侧翻时的侧向加速度。普通卡车非线性轮胎的侧偏刚度随垂直载荷的变化如图2所示。
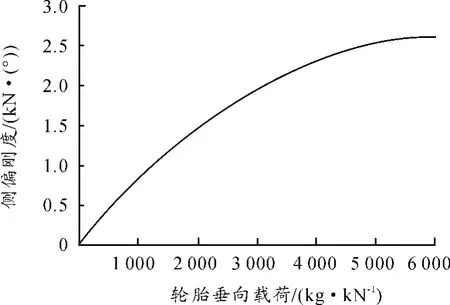
图2 轮胎非线性特性
将建立的模型在转向盘角阶跃输入条件下进行仿真,分析在不同条件下半挂汽车列车各轴的轴向载荷转移。轴向载荷的定义为
其中F1和F2为左右车轮的垂直载荷,当ΔF=±1时,表示有一侧的车轮已离开路面。
2 仿真模型的建立
令
将式(1)~(13)写成状态空间表达式

其中:u是主动防侧倾杆的控制扭矩向量;δ是输入转向角。在Matlab中编写m文件,将参数输入后就得到系统的状态空间表达式,在Matlab/Simulink中搭建系统的仿真模型,如图3所示。本文不考虑采用主动悬架的汽车列车,只对被动悬架的半挂汽车列车进行分析,因此这里的u都设置为0。
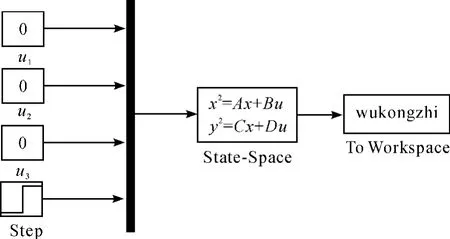
图3 Matlab/Simulink中搭建系统的仿真模型
将仿真结果输入到Workspace中,编程计算得到半挂汽车列车的3个轴的轴荷转移情况。
3 仿真结果与分析
半挂汽车列车的主要参数如表1所示。
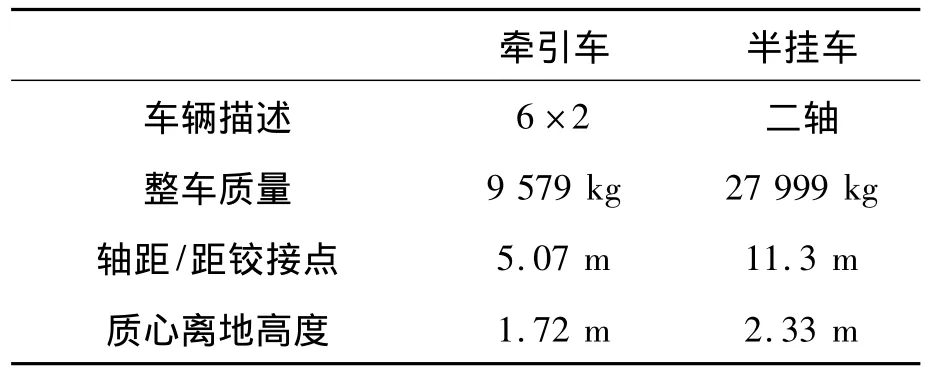
表1 半挂汽车列车主要参数
仿真中采用角阶跃输入,分析在不同的结构参数下半挂汽车列车各轴的载荷转移情况。初始仿真采用的速度为60 km/h,结构参数不变。
转角输入曲线如图4所示,仿真所得结果如图5所示。

图4 转角输入曲线
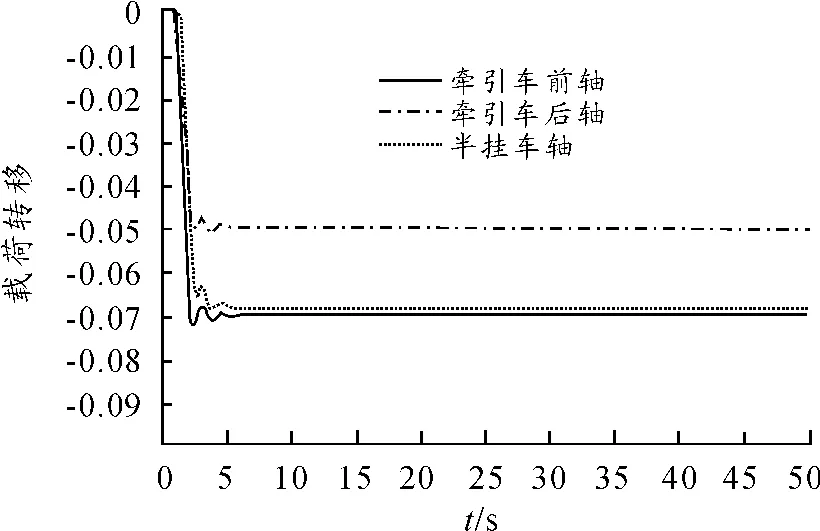
图5 60 km/h时各轴载荷转移情况
由图5可看出,牵引车的前轴与半挂车轴的载荷转移较大,为危险车轴。由于半挂汽车列车的结构参数过多,这里只选择几个典型的参数进行仿真。
3.1 车速的改变
转角不变,将速度设为80 km/h进行仿真,仿真结果如图6所示。
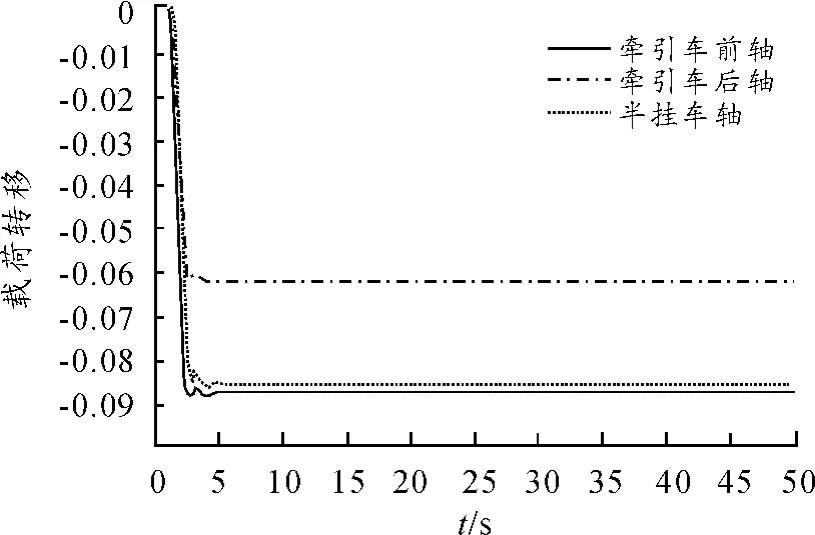
图6 80 km/h时各轴载荷转移情况
将图6与图5比较可以看出:随着车速的增加,半挂汽车列车的各轴轴荷转移都变大,汽车侧倾稳定性变差,加大了侧翻的危险。
3.2 簧载质心高度的改变
车速为60 km/h,其他参数不变,只增加牵引车的前簧载质量质心高度,由原来的1.72 m增加为2.2 m,得到的结果如图7所示。
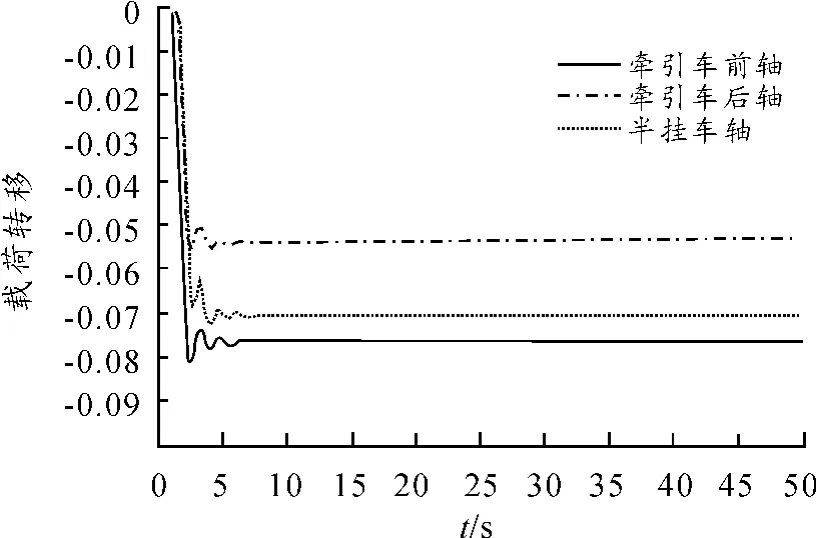
图7 增大质心高度时各轴载荷转移情况
比较图7与图5可以看出:当改变牵引车簧载质量质心高度时,牵引车各轴载荷转移变化较大,侧倾稳定性变差,加大了侧翻的危险。
3.3 悬架侧倾刚度的改变
车速为60 km/h,其他参数不变,只减小悬架侧倾刚度。
3.3.1 减小牵引车悬架侧倾刚度
当牵引车前悬架侧倾刚度380 kN·m/rad、后悬架侧倾刚度684 kN·m/rad变为前悬架侧倾刚度280 kN·m/rad、后悬架侧倾刚度584 kN·m/rad时,仿真结果如图8所示。
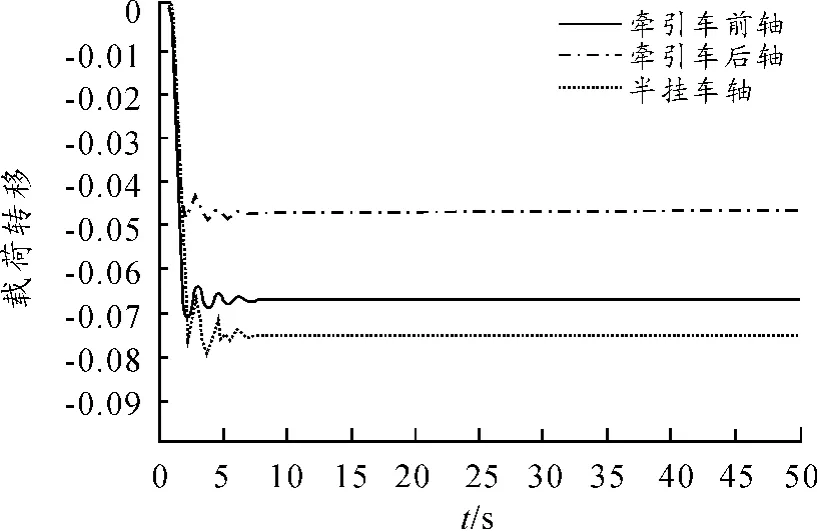
图8 改变牵引车悬架侧倾刚度各轴载荷转移情况
比较图8与图5可以看出:在减小牵引车的悬架侧倾刚度后,牵引车前轴的载荷转移变小,半挂车车轴的载荷转移变大。
3.3.2 减小半挂车悬架侧倾刚度
半挂车集中轴悬架侧倾刚度由2 400 kN·m/rad变为1 400 kN·m/rad,仿真结果如图9所示。
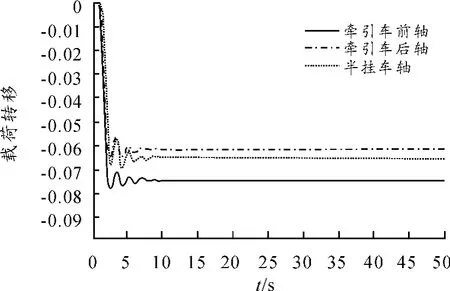
图9 改变半挂车悬架侧倾刚度各轴载荷转移情况
比较图9与图5可以看出:在减小半挂车的悬架侧倾刚度后,牵引车前轴的载荷转移变大,半挂车车轴的载荷转移变小。
3.4 改变牵引车身的扭转刚度
车速为60 km/h,其他参数不变,只减小牵引车的车身扭转刚度,由原来的629 kN·m/rad变为429 kN·m/rad,仿真结果如图10所示。
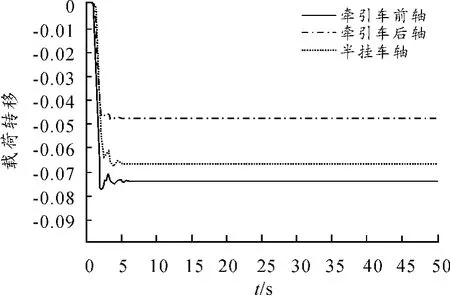
图10 改变牵引车车轴扭转刚度各轴载荷转移情况
比较图10与图5可以看出:在减小牵引车的车身扭转刚度后,牵引车前轴的载荷转移变大,后轴的稍微减小,但是危险轴载荷转移变大会导致稳定性变差,加大了侧翻的危险。
4 结束语
根据建立的柔性车身半挂汽车列车的侧倾数学模型,在Matlab/Simulik中编程和搭建了动力学仿真模型。在转向盘角阶跃输入条件下,分析了在不同车速与不同半挂汽车列车结构参数下车辆各个轴的轴荷转移情况。研究结构参数与侧倾稳定性的内在的联系,并验证了所建立模型的正确性。本研究对于下一步采用主动悬架控制整车的侧倾稳定性、防止侧翻的发生奠定了基础。
[1]Dr Janice,Dr Steven Chien.Identifying Factors and Mitigation Technologies in Truck Crashes in New Jersey[J].Final Report,2003(9):46-51.
[2]冀泉松.全挂车易翻问题浅析[J].专用汽车,2007(6):42-43.
[3]高术振.半挂车侧向稳定性分析[J].水利电力机械,2005(4):18-21.
[4]陈春毅.威伯科公司的商用车电子稳定控制系统[J].汽车与配件,2006(7):48-49.
[5]Sampson D J M.Rollover Warning for Articulatd Heaver Vehicles Based on a Time-to-Rollover Metric[J].ASME,2003,127:126-132.
[6]Md Manjurul Islam,Yuping He.An Optimal Preview Controller for Active Trailer Steering Systems of Articulated Heavy Vehicles[D].Ontario:Univ.of Ontario Institute of Technology,2003.
[7]Thomas J,Wielenga-Dynamotive.A Method for Reducing On-Road Rollovers-Anti-Rollover Braking[J].SAE Paper,1999(1):123-129.
[8]Fabian Becker,Sebastian Buerkle,Maximilian Schaeffner.Martin Sehr Development of a Rollover Prevention System for Truck Trailer Combinations using ActiveSuspension Control[D].Technische:Technische Universitat Darmstadt,2011.
[9]Lin R C,Cebon D,Cole D J.Active Roll Control of Articulated Vehicles[J].Vehicle System Dynamics,1996(1):45-55.
[10]Sampson D J M,Cebon D.An Investigation of Active Roll System Design forArticulated Heavy Vehicles[J].AVEC’98,1998(2):133-139.
[11]Dundoody A B,Froese S.Active Roll Control of a semi-Trailer[J].SAE Transactions,1993,34(5):999-1003.
[12]于尧.基于差动制动的半挂汽车列车稳定性仿真与控制研究[D].长春:吉林大学,2007.
[13]宗长富.二次型最优控制的半挂汽车列车主动侧倾控制算法研究[J].中国机械工程,2008(7):872-877.
[14]张不扬.车辆侧翻预警研究现状与关键技术[J].汽车技术,2010(8):27-31.
[15]王健.基于滑模观测和模糊推理的车辆侧翻实时预警技术[J].农业机械学报,2010(4):1-6.
[16]朱天军.基于Matlab的半挂汽车列车侧倾稳定性分析[J].汽车技术,2008(11):16-21.
