某武器系统的CAN通信系统设计与实现*
2013-12-10马礼举
韩 薇,马礼举,温 凯,郭 毅
(1中国兵器工业第203研究所,西安 710065;2驻847厂军事代表室,西安 710043)
0 引言
20世纪80年代以来,信息工程、计算机技术、电子技术等日新月异的发展不断给军工科技提供新的思路。武器系统需要共享传输的信息越来越多,类型越来越复杂,CAN总线具有数据传输速率高、实时性强、可靠性高、结构简单、互操作性好等优点,克服了传统总线的缺陷,是武器系统通讯的一种有效解决方案。
但是,导弹发射车的CAN网络具有其独特性:不仅车上有多个CAN节点,弹上也有多个CAN节点;导弹发射后,弹上部分节点与车上节点断开,且弹上节点、车上节点各自继续完成CAN通信。如何保证导弹在位时,在满足实时性前提下系统CAN通信稳定可靠;导弹发射后飞离导弹发射车时,导弹发射车上的CAN节点通信不受影响;导弹飞行过程中,弹上的CAN节点通信稳定可靠,是文中研究的关键问题。
1 武器系统CAN网络拓扑
1.1 网络拓扑类型
网络拓扑有总线形、环形、星形、网形及这几种结构套用的复杂结构,总线形是 CAN国际标准ISO11898推荐使用的拓扑。但由于总线形结构对总线分支的长度要求(见图1,d<0.4m),宜采用优化的总线形结构——菊花链形网络(见图2,d=0)。

图1 总线形网络

图2 菊花链形网络
环形拓扑结构中,单个节点或一处线缆发生故障将会造成整个网络的瘫痪。
星形结构中,网络中的每个节点通过一个中央设备连接在一起,各节点将数据发送到中央设备,再由中央设备将数据转发到目标节点。星形网络中任何单根电缆只连接两个设备(如一个节点和一个集线器),因此单个电缆或节点发生故障,顶多影响两个节点,不会导致整个网络的通信中断;星形结构中各节点可以很容易的移动、隔绝或与其他网络连接,扩展性强。这些特点非常适合导弹特性,可以很好解决导弹飞离对CAN网络的影响问题。
但星形网络的缺点也很明显:中央设备故障会导致整个网络的瘫痪。另外,星形结构所需的线缆和配置明显多于环形或总线形网络,但其总长度与环形或总线形网络一样受波特率、节点数量等因素制约。若节点数较多、波特率较高或系统实时性要求高,不适于用星形结构。所以,导弹发射车系统(地面网)显然不适合星形结构。
1.2 武器系统网络拓扑
1.2.1 系统网络拓扑设计
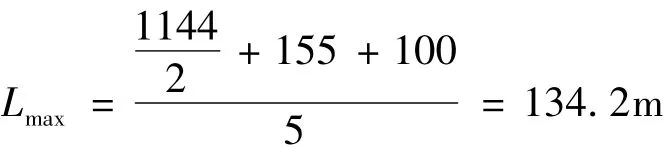
某武器系统地面15个节点,弹上8个节点,若全部采用星形结构,假设地面每个节点距“中央设备”的平均距离为3m、弹上每个节点距“中央设备”的平均距离为5m,则总线总长度为:

根据1.2.2 节的论述,此结果大于 134.2m,是不适用的,因此系统不能全部采用星形结构。若全部采用菊花链形结构,由于导弹发动机燃烧喷出的尾焰、导弹发射后的冲击力都可能对菊花链的连接点产生影响,影响整个系统的通讯。所以,将8发导弹单独组网并与地面网络隔离是必要的,即采用“双网”完成系统通讯。
地面各节点位置相对固定,适合采用菊花链型网络。总线的主干网布好后,在联试联调中各节点移动、离开主干网,都不会影响其他节点的正常通讯。弹上网络适合选择星形结构。
基于以上分析,最终的某武器系统网络由导弹网络及导弹发射车网络(地面网)组成,地面CAN网络为菊花链形结构,由屏蔽双绞线加两端的匹配电阻构成,各部件节点挂接在网络上;导弹网络为星形结构,所有节点通过接插件接在CANHUB上。网络拓扑见图3,图3中虚线所示的连接,在导弹飞离发射架后断开。
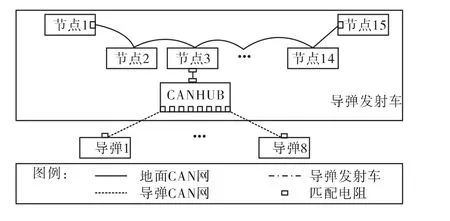
图3 地面网与弹上网之间通讯示意图
地面网与弹上网之间通讯,还需要转接设备,目前使用发控装置(图3中节点3)进行转接。发控装置有两个独立的CAN口,一个与地面网络连接,另一个与弹上网络连接;发控装置CPU对数据判读,将两个CAN口数据相互传递,实现地面数据上传或弹上数据下传。在实验室摸底时,发控装置计算机两个CAN口数据转接的延迟不大于2ms。
在导弹发射前,地面网所有分系统已经上电工作,弹上只有弹上计算机接收地面发控装置装定的诸元。导弹击发并飞离发射架后,弹上计算机与发控装置的连接断开,导弹所有节点上电工作,形成导弹、导弹发射车两个独立的CAN网络。增加或失去一个节点对CAN网络通讯没有明显影响,而且导弹与武器站两个网络之间没有直接连接,所以导弹是否在位不影响武器系统的通讯。
1.2.2 最大总线线路估算
根据各项参数及芯片特性,考虑网络拓扑结构的特点,计算总线最大长度及两个节点之间的最小距离有如下两个公式:

其中:Lmax为可行的最大总线线路长度;tprop为最大的双向传播延迟;tloop.eff为有效的收发器循环延迟;tloop.eff.oth为其它元件(如 CAN 控制器、光耦等)的有效循环延迟;tp为总线电缆的特定延迟。

其中:ρmax为电缆的每个长度单位横截面积的最大特征阻抗;Vdiff,out,min为显性电平差动输出电压的最小值;Vth,max为接收器的最大显性阀值电压;Ksm为检测显性位的期望安全余差;RT,min为终端电阻的最小值;Rdiff,min为节点差动输入阻抗的最小值;nmax为连接总线的最大节点数量。

芯片PCA82C250在高速模式下,tloop,eff=155ns;

根据式(1),得:
同理,根据式(2),可得:
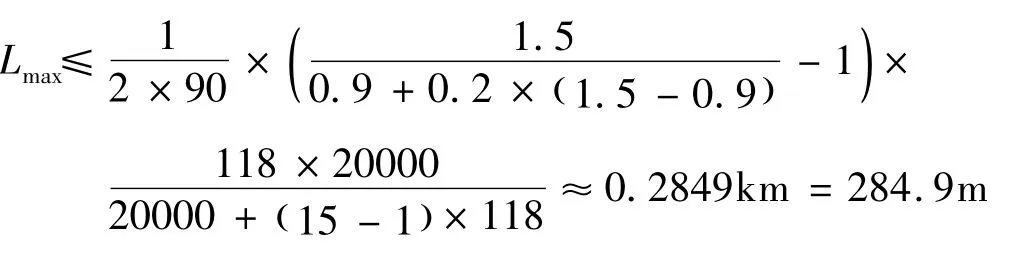
综合以上结果,Lmax选取不大于134.2m即可。实际网络敷设完毕后长度约34m,远小于要求的最大长度。
2 系统通讯延时
2.1 系统流程分析
系统工作流程主要分为5个阶段,其中只有传递对准阶段数据量大、实时性要求高,其他时间段的通讯有的数据量大但实时性要求不高,有的实时性要求高但数据量不大。在传递对准阶段,节点A将敏感到的传递对准信息通过CAN总线发送给发控装置,发控装置再转发给弹上计算机;弹上计算机通过RS422将传递对准信息传给节点B,节点B执行传递对准任务。
2.2 传递延时计算
按照传递对准信息传递要求,有:

式中:B为波特率,T转为发控装置的两个CAN口进行传递对准信息传递所需时间。T转在电路上有微秒级的延迟,更多的延迟是进行打包转发、数据拼接所耗费的时间。经过实验室摸底,时间T转<2 ms。t0不大于5ms,则上式为:

2.2.1 波特率选250kbps
当波特率选择250kbps时,式(3)为18.94ms<20ms;此时总线负载预计为:

当总线数据量小于30%时,CAN总线才能稳定可靠工作。波特率为250kbps时,CAN总线负载大于30%,不能满足系统要求。
2.2.2 波特率选500kbps
当波特率为500kbps时,式(3)为17.08ms<20ms;此时总线负载预计为:

能够满足CAN总线的要求。
2.2.3 小结
综上所述,系统在进行传递对准时,如果没有其他大数据量的信息传递,波特率选择为500kbps时,传递对准信息传递时间小于20ms,总线负载小于30%,能够满足系统要求。
3 结论
由于武器系统的特殊性,其CAN通信网络采用菊花链与星形结构相结合的拓扑结构,且对系统通讯延时进行了详细计算与实验室摸底。
在样机联试与导弹飞行试验中,武器系统通信网络工作稳定,能够满足系统要求,可为今后其他类似系统提供参考。
[1]阳宪惠.现场总线技术及其应用[M].北京:清华大学出版社,1999.
[2]张振德,崔玉龙,吴临政.基于补偿机制的星型CAN网络拓扑结构实现[J].自动化与仪表,2009(8):17-20.
[3]谢俊红,林轶,陈三鉴,等.基于SAE J1939协议的车辆网络集成方法[J].单片机与嵌入式系统应用,2009(5):8-10.
[4]史久根,张培仁,陈真勇.CAN现场总线系统设计技术[M].北京:国防工业出版社,2004.
[5]Philips semiconductors PAC82C250 CAN controller interface datasheet[Z].1997.
