基于椭球拟合的弹载MIMU现场快速标定技术*
2013-12-10田晓春范玉宝
李 杰,田晓春,范玉宝,刘 俊,陈 伟
(1仪器科学与动态测试教育部重点实验室,太原 030051;2电子测试技术国家重点实验室,太原 030051;3山西北方惠丰机电有限公司科研设计二所,山西长治 046012)
0 引言
硅微惯性测量组合(陀螺仪、加速度计)性能的好坏直接影响惯性测量的精度[1],惯性器件的测试标定已成为惯性测量组合使用过程中的重要环节。惯性测量组合中惯性器件的参数随着系统的使用或存放时间的推移而变化[2],最为显著的就是传感器的零位漂移,与初始标定时间相隔越长,传感器的零漂越明显;实验表明,加速度计和陀螺仪的零偏对导航计算结果的误差影响分别按时间的二次方和三次方增长。因此,弹载惯性测量组合在靶场实验环境中传感器自身性能参数与实验室环境中转台标定参数会有很大不同,实弹飞行测试中,惯性测量单元中传感器输出参数误差会产生较大的解算误差,影响惯性测量组合的测试精度[3-4]。由于火箭弹、炮弹等常规武器飞行时间短,因此与弹体固联的惯性测量单元在较短的工作时间内需要有准确的参数输出,以提高导航计算机的解算精度,在靶场实验环境中,不可能对安装于弹体中的惯性测量组合进行转台标定,鉴于此,文中提出了一种不依赖精密仪器、简易可行的MIMU现场快速标定技术。
微惯性测量组合中,加速度计和陀螺仪分别以地球上某固定点处重力场为恒定矢量及地球自转角速率为固定值这一客观事实为基准进行快速标定,二者标定方法基本类似,文中以加速度计现场快速标定为例进行说明,以下不再赘述。
1 MIMU中三轴正交配置加速度计静态输出特性
通常,输出量为电压值的加速度计在地球重力场的测试中,可以采用的简化的静态数学模型方程:

其中:ui表示i轴加速度计输出电压,ki为i轴加速度计灵敏度,ai为i轴敏感输出加速度,ui0为i轴加速度计零偏。理想情况下,三轴正交配置加速度计输出模型为:

考虑到安装误差角,在标定时引入交叉轴灵敏度kij,表示i轴方向有加速度输入时j轴输出加速度与输入轴之间关系的比例常数,完善后的三轴正交配置加速度计输出模型为[10]:

从模型可以看出待标定参数为惯性测量单元中3个加速度计的零位、主轴灵敏度及交叉轴灵敏度等共计12个参数。实际应用中,交叉轴灵敏度kij很小,随着时间的推移,其变化对最终解算结果产生的影响很小,因此,现场标定时可只标定传感器零点ui0及主轴灵敏度ki,交叉轴灵敏度可用最近一次转台标定结果
ij近似代替。优化后三轴正交加速度计输出模型为:

理想情况下,惯性测量单元中的三轴正交加速度计在不同位置姿态情况下对同一地点的重力加速度进行测量所得到的模值是一个定值,因此,静止放置的理想三轴正交配置加速度计可以测得对应3个轴向加速度分量,而且以该加速度分量为坐标的点在测量坐标系中构成一个圆心在原点,半径为当地重力加速度的球体。即:

式(5)可以变换为如下二次标准型方程:

即以惯性测量单元中3个正交加速度计输出电压值作为变量,构成一个广义标准二次球体曲面方程,实际应用中,惯性测量单元中加速度计的输出受各种误差源的影响,因此,实测数据得到的球体曲面为一个中心偏离坐标原点的椭球面,通过确定其几何中心的位置坐标与椭球体的形状参数就可以得到加速度计的零位、灵敏度等参数。
精神支柱,是发展的灵魂,精神力量是推动事业发展的强大动力。高水平的科研必然是克服重重困难的结果,需要一种“以民族振兴为己任”而不懈奋斗的精神动力。至于“名利”,作为科技成果的价值体现,是正常的管理制度产生的结果,而不是研究者可靠的内生动力。科技史上高水平的创新,常常是非功利追求的结果。
2 加速度计现场标定模型及方案
惯性测量组合中加速度计三轴正交配置,因此可以利用三轴正交配置加速度计静态输出特性进行标定,即利用加速度计输出电压拟合寻求最佳的拟合椭球曲面。
椭球面是一种特殊的二次曲面,假设该二次曲面方程为:

式中,ξ = (a,b,c,d,e,f,p,q,r,g)为待求椭球参数,η = ( x2,y2,z2,2xy,2xz,2yz,2x,2y,2z,1)为测量数据运算的组合向量,F (ξ,η)为测量数据(x,y,z)到该椭球曲面F (ξ,η)=0的距离。
常规的基于代数距离最小二乘法拟合椭球将所有样本点都当作准确值,当样本点中出现杂质点时,拟合的椭球误差较大,不能满足精确度较高的系统要求。所以根据椭球曲面的性质,在拟合椭球的同时加上约束条件以保证最终所得曲面为椭球。采用最小二乘法进行椭球拟合的本质就是寻找一组椭球参数使得拟合椭球面与实际椭球面间的距离最小[5],以此为判断准则,拟合得到的最佳椭球曲面的二次型函数F ξ,
( η)用矩阵记号可表示为:展开可得:


解方程组得到待标定参数的计算表达式如下:

利用式(14)得到现场标定零点u0和主轴灵敏度kxx、kyy、kzz等参数,结合最近一次转台精确标定轴间灵敏度ij即可完成对加速度计的现场快速标定,得到实际靶场环境下加速度计的零位输出和标度因数矩阵。
根据以上理论模型推导,可确定在没有精密标定设备环境下惯性测量单元中加速度计的现场标定方案如下:1)根据惯性测量单元在载体上的安装方式,大致绕MIMU的x、y、z轴转一圈,确定拟合椭球面上绕轴旋转的3个大圆;2)随机旋转微惯性测量组合,使其姿态角对应点尽可能覆盖拟合椭球体的绝大部分球面;3)在采集电路为5K采样率情况下步骤2),中每个点静止采集20s。
3 试验验证
为验证椭球约束条件下现场标定技术的有效性及标定结果的可行性,在室温条件下,以实验室自行设计、集成的惯性测量单元和采集存储电路为测试平台进行转台精确标定和现场标定对比研究。

图1 惯性测量单元

2 三轴多功能位置速率转台
试验过程中,将惯性测量单元安装于转台台面中心,设置转台工作方式为位置方式对惯性测量单元中的加速度计进行精确标定,处理数据得到当前环境下惯性测量单元中加速度计的零点、主轴灵敏度、交叉轴灵敏度等参数。
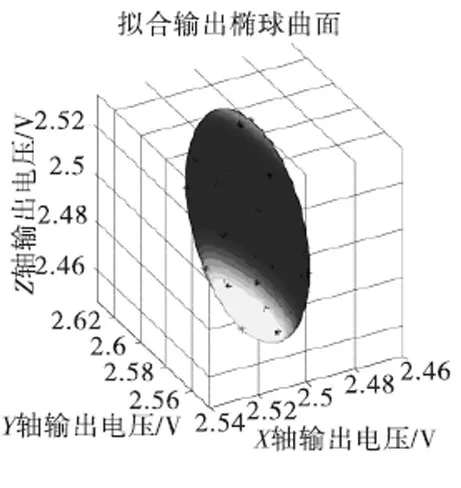
图3 加速度计输出电压拟合椭球曲面
选用同一惯性测量单元在相同实验环境下,根据文中所确定的加速度计现场标定方案进行标定,现场标定完成后,对采集到的数据进行处理得到各位置下加速度计的输出电压值,利用得到的三轴输出电压值拟合出椭球曲面,如图3所示,得到最佳拟合参数 ξ = [a,b,c,d,e,f,p,q,r,g]T,进而整理得到椭球形状特征矩阵A和椭球中心坐标X0,并求出 A-1,计算出现场标定的6个参数,转台精确标定结果和现场快速标定结果如表1所示。

表1 现场快速标定与转台精密标定结果对比
由表1中的数据分析可知,以转台精确标定结果为参考,现场标定出的参数和转台标定得到的结果相差量在次毫伏位,在现场没有精密转台的实验环境中,该方法的标定精度与转台标定得到的结果精度相当,能够满足实际数据解算的需求。
实际应用中,惯性器件的零位输出随时间推移产生的漂移较大,而惯性测量单元在安装完成以后,其安装误差角为一定值,交叉轴灵敏度基本不随时间变化而变化,故在进行数据解算时,加速度计零位输出采用现场标定得到的零位,现场标定得到的主轴灵敏度和转台前期标定得到的交叉轴灵敏度构成三轴正交加速度计的标度因数矩阵。
4 结论
文中针对惯性测量单元中加速度计零位、主轴灵敏度随时间的推移而变化的问题,提出一种基于椭球约束的现场快速标定方法,该方法不需要精密标定设备,只需将惯性测量单元按一定方式随机旋转若干姿态,通过椭球拟合求解二次曲面方程,得到各加速度计零位、灵敏度等6个参数。试验结果表明该标定方法操作简单,标定结果输出精度与转台精确标定精度相当,适合在没有精密标定设备的环境下(如靶场)对惯性测量单元进行快速标定,具有重要的工程应用价值。
[1]刘俊,石云波,李杰.微惯性技术[M].北京:电子工业出版社,2005:296-300.
[2]刘百奇,房建成.光纤陀螺IMU的六位置旋转现场标定新方法[J].光电工程,2008,35(1):60-65.
[3]刘锡祥,徐晓苏.惯性测量组件整体标定技术[J].中国惯性技术学报,2009,17(5):568 -576.
[4]Kim A,Golnaraghif M F.Initial calibration of inertial measurement unit using an optical position tracking system[C]//Position Location and Navigation Symposium,2004:96-101.
[5]张晓明,赵剡.基于椭圆约束的新型载体磁场标定及补偿技术[J].仪器仪表学报,2009,30(11):2439 -2443.
