The Mobile Robot Trajectory Tracking Control Based on the EKF and the Lyapunov Function
2013-12-07WANGJingJIANGGang
WANG Jing, JIANG Gang
School of Manufacturing Science and Engineering, Southwest University of Science and Technology, Mianyang 621010, China
TheMobileRobotTrajectoryTrackingControlBasedontheEKFandtheLyapunovFunction
WANG Jing*, JIANG Gang
SchoolofManufacturingScienceandEngineering,SouthwestUniversityofScienceandTechnology,Mianyang621010,China
Accordingtothefactthatthewheeledmobilerobotsareinfluencedbytheenvironmentalfactorinpractice,theinformationofreferencetrajectoryoftherobotwascorrectedbyusingtheextendedKalmanfilter(EKF)algorithmfusionodometryandultrasonicobservationdata.Basedontherobotdynamicmodel,aglobalasymptoticalstabletrackingcontrollerwasconstructedbyusingtheLyapunovdirectmethod,andtheglobalstabilityofthesystemwasprovedbyusingLyapunovstabilitytheorem.Thesimulationresultsofthispapershowedthatthetrackingcontroller,whichcombinedboththedatafilteringandLyapunovmethod,hasbetterefficiency.
wheeledmobilerobot,extendedkalmanfiltering,Lyapunovmethod,trajectorytracking
1.Introduction
With the Wheeled Mobile Robot (WMR) used more and more widely, the demand of robot automation degree is getting higher and higher. The control of robot movement includes navigation path, speed and acceleration. The movement control methods mainly have the PID control, variable structure control and adaptive control, the fuzzy control, etc. Variable structure control is applicable to all kinds of linear and nonlinear system and it also has good adaptability to the system of interference and perturbation. Literature[1] used Lyapunov function variable structure design trajectory tracking control law, but only its linear system in the control law has asymptotic stability. Literature[2] took the back of thought design the tracking controller which possesses global convergence property .But the sliding mode controller design structure is complex.
The motion process of robot must gather sensor data, provide reference trajectory for the robot. There will be noise in the acquisition process; therefore, it is especially important to choose an appropriate filtering method.
Aimed at above problems, this paper used the extended Kalman filter (EKF) algorithm for optimal estimation of the reference trajectory, at the same time, based on control Lyapunov function (CLF) designed sliding mode controller for speed tracking control rates and nonlinear switching function. This method not only had simple design, but also the system had global asymptotic stability. For the mobile robot, the simulation results showed that this method has good trajectory tracking effect and could meet WMR trajectory tracking requirements.
2.Mobile robot kinematic model
Two rounds of the mobile robot model (as shown in Fig .1), including two rounds about, they are the drive wheels. Among them:XOYfor the global coordinate system, the state of the WMR by two driving wheels axis midpointMin the coordinate system location and heading angle of the coordinate system to represent, order, speed instructions, WMR’s kinematics equations.
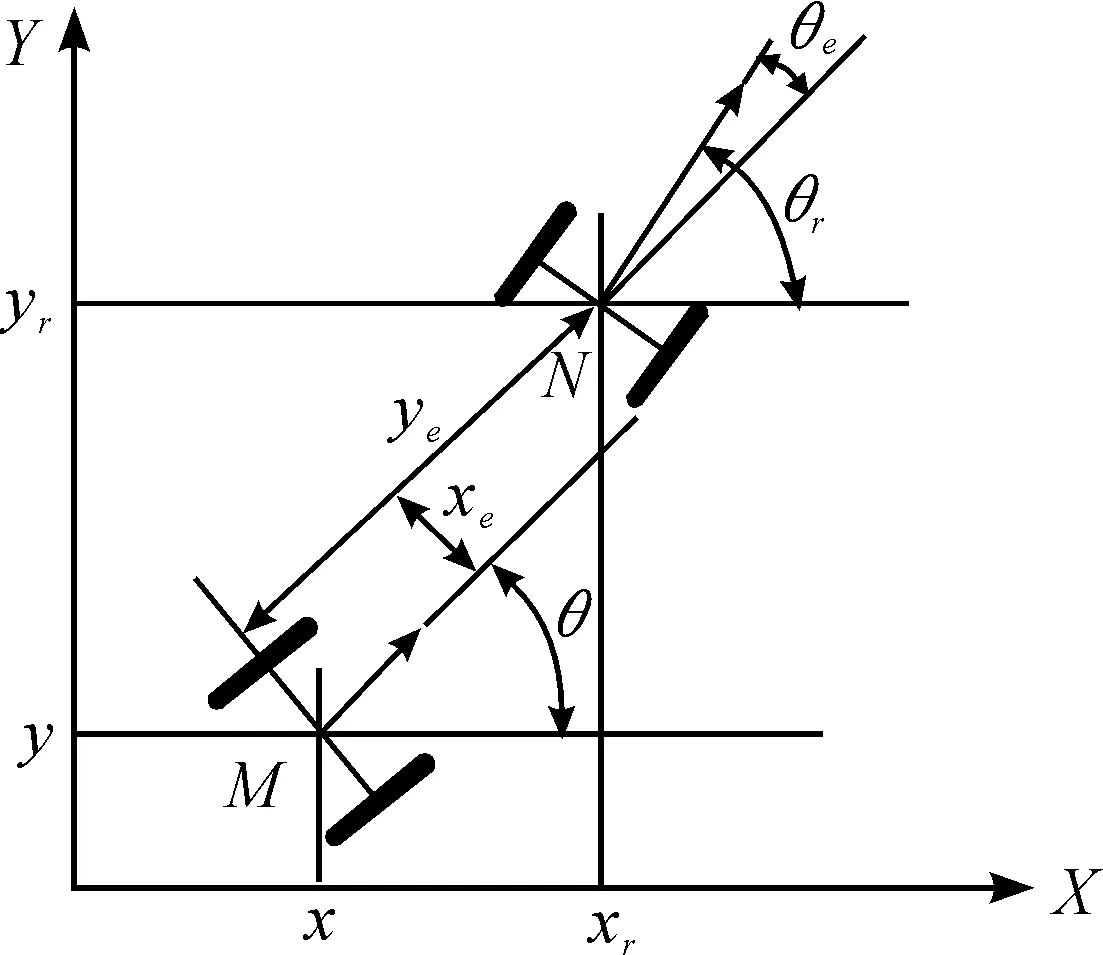
Fig.1 Robot pose error coordinates

(1)
R(pr-p)
(2)
Where,Ris the transfer matrix.(xe,ye) is the vector coordinates of the local coordinate system. The robot pose error of the differential equation[3]:
(3)

3.Extend Kalman Filtering
Robot in athletic process gets the reference trajectory information by the sensors. Because of the noise, the robot reference trajectory measurement leads to a windage in the measurement results. Additionally, because the sensor and robot movement system is nonlinear, so when the state variable is small, the nonlinear function which is used to describe system and measurement can be considered asymptotically linear.The Extend Kalman Filtering is actually a special state estimation device which through the linear to achieve the asymptotic optimal bayesian decision-making[4]. Ultrasonic data and calculated the fusion process schematic position are shown in Fig.2.
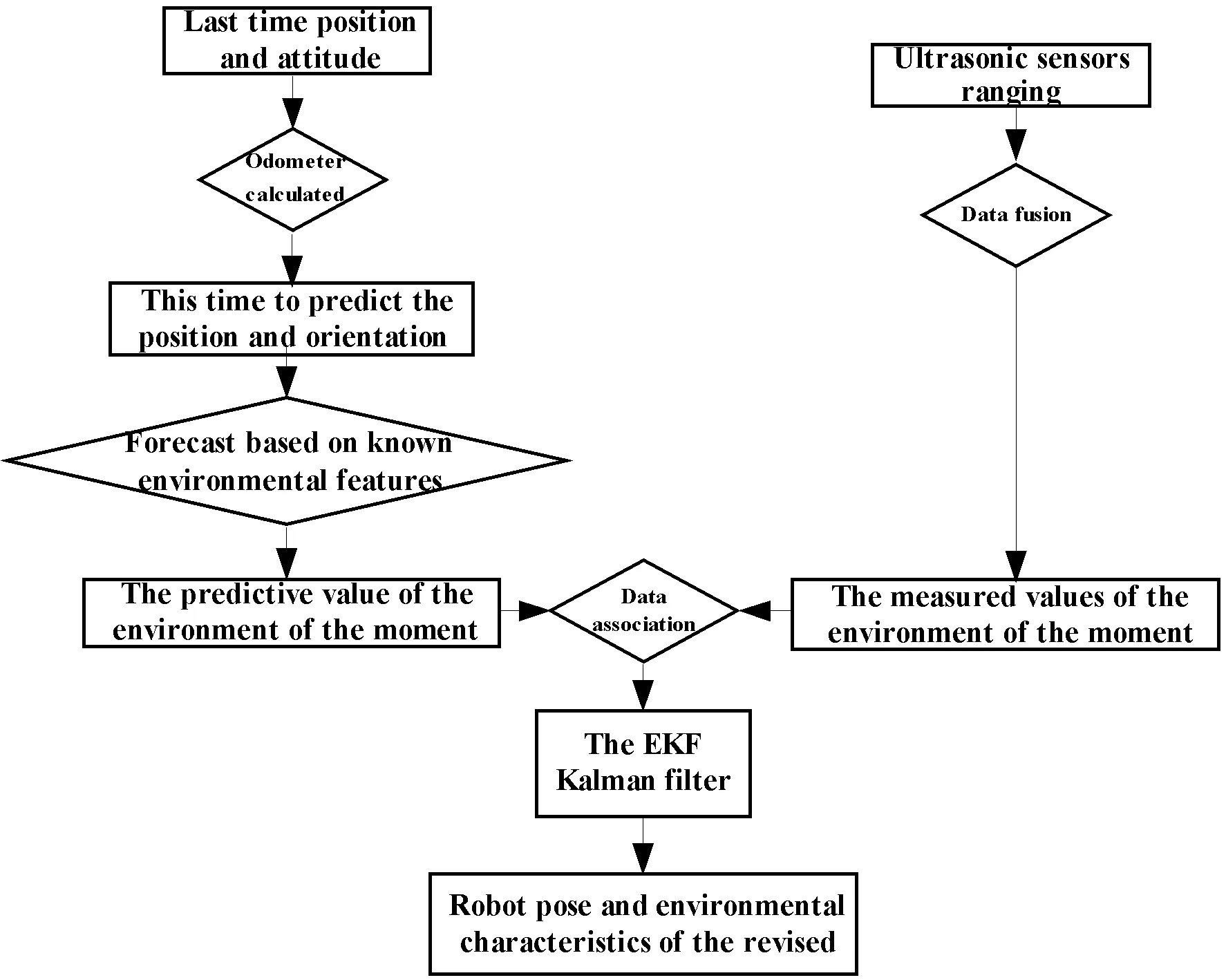
Fig.2 Data integration flow chart
The noise of the real-time will influence the robot state measurement, includingX,Yandθvariables. Therefore, there is a need to filter these three parameters, respectively. Here in theXaxis for example, which gives extended kalman specific algorithm[5]. Hypothesis of the nonlinear systems for random difference equations are as follows:
xk=f(xk-1,uk-1,wk-1)
zk=h(xk,vk)
(4)
Among them:xkis the system state vector,zkis system observation vector,his the measurement function of the system,wk-1andvkare system noise and measurement noise, respectively, anduk-1is control function. In practice, we don’t know every moment of noise, i.e., the value ofwk-1andvk. Assume they are all zero, the state vector and observation vector are as follows:
(5)
Among them,xkis relative to a time before the process of the posteriori estimation ofk. Specific EKF algorithm procedure is as follows:
A.Time update equations:
(6)
(7)
B.Status update equations:
(8)
(9)
(10)
HkAndVkwere Eq. (5)htox,vpartial derivative of Jacob matrix at timekvalue. This is measurement noise at timek. A key part of the algorithm is that the Kalman gain expression of the Jacobi matrix can correctly pass or “weighted” observations useful information[6-7]. After the above steps to push the calculation, the estimated value of theX-axis direction of the whole process, similarly you can count theYdirection and the angleθvalue, therefore, the algorithm can estimate the reference trajectory in real time.
4.Sliding mode controller design

(11)
Lyapunov function of structure is:
(12)
ObviouslyV≥0, whenpe=0,V=0; whenpe≠0,V>0. Plug Eq. (3) and (11) into equation (12), it comes that:
k2xe(vrcosθe-v+wye)+k2ye(vrsinθe-xew)+

k2k3xeyevr·sinθe+k2yevr·sinθe-k2wrxeye-

Therefore, the sliding mode control Eq. (11) about the control law of the system asymptotic converge to a stable equilibrium pointpe=0.
5.The simulation experiment and analysis
According to the EKF and Lyapunov function, mobile robot sports system is simulated. The simulation procedure is as follows: the first step, with extended kalman filtering method to estimate the experimental data of the track reference, the effect could be obtained as shown in Fig. 3 and Fig.4. The second step, in order to verify the error of the global convergence properties, experimental reference input were divided into two kinds i.e., circular arc and linear. Under the different initial conditions and reference inputs, the simulations were conducted. Fig.5~7 were the trajectory tracking of the experimental results of robot in the circular arc and the Fig. 8~10 were the trajectory tracking of the results of robot in linear.
More graphics showed that, according to estimates of the reference trajectory EKF, robot can be used. The proposed controllers in the initial system conditions change, in sliding mode controller will be under the action of convergence. Mobile robot with these two methods has better performance under the control of the tracking performance.
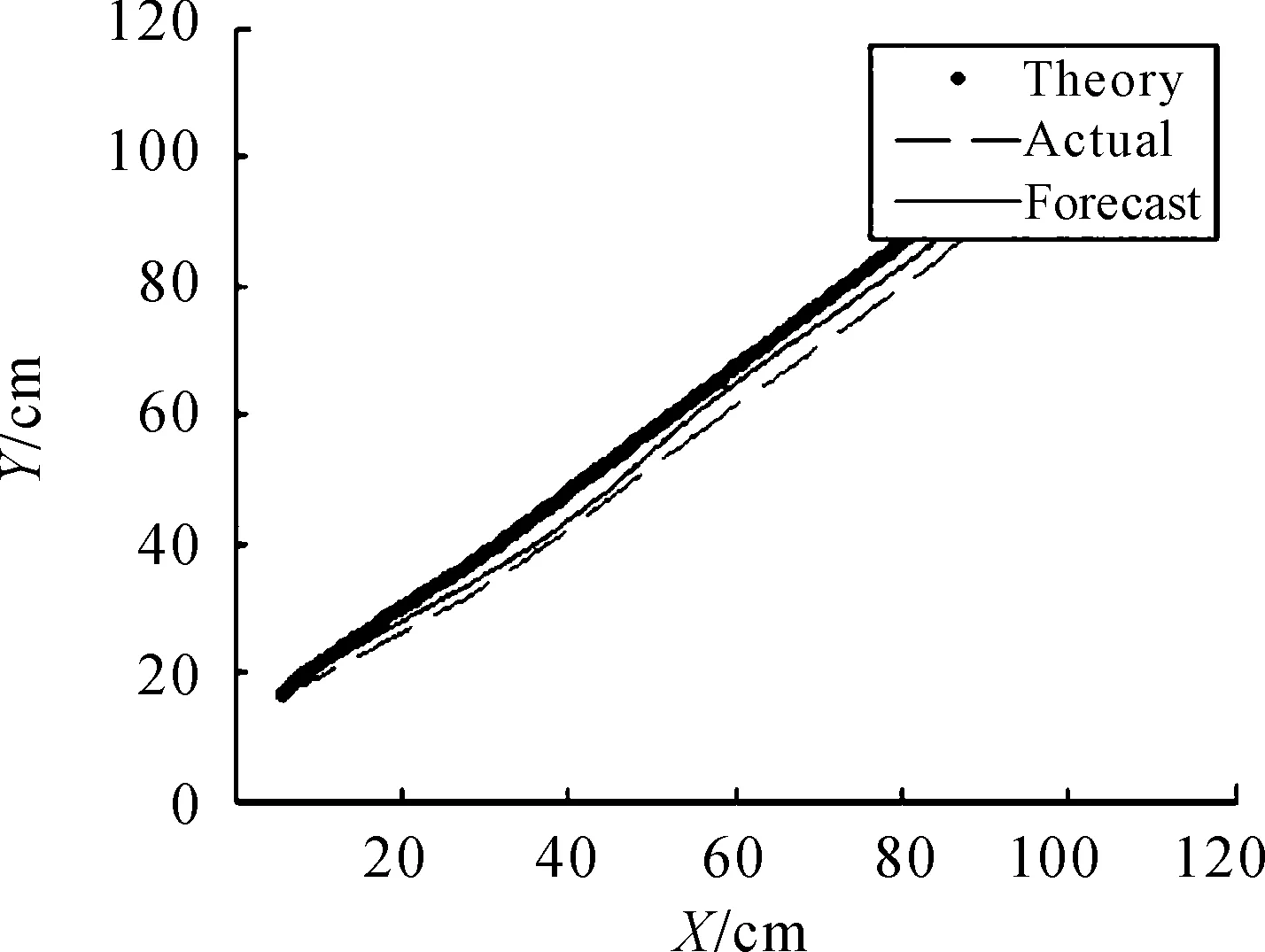
Fig.3 Robot straight-line movement pose estimation
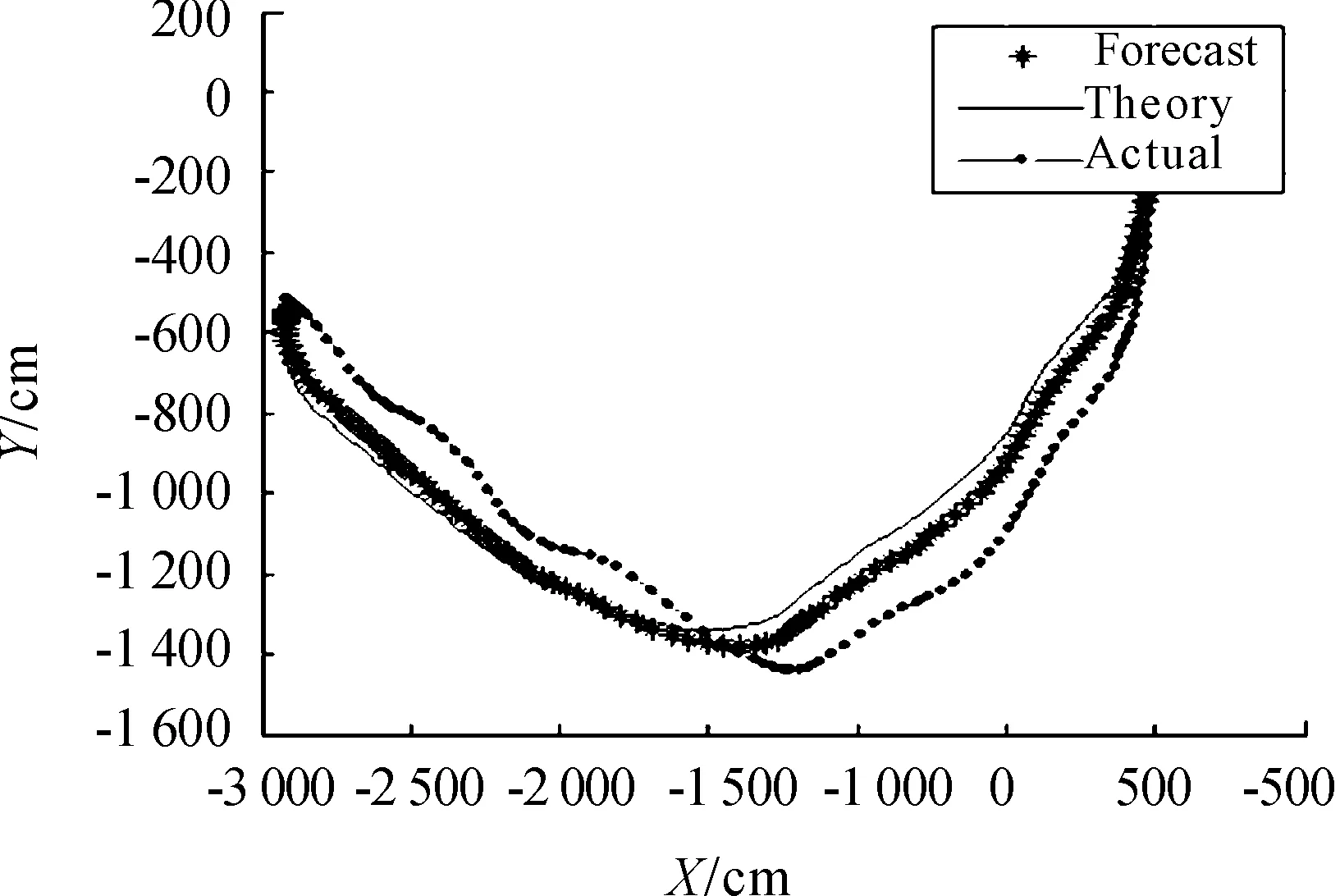
Fig.4 Robot curve movement pose estimation

Fig.6 obot circular trajectory parameter v, w

Fig.7 Robot circular trajectory theory and the actual contrast result

Fig.9 Robot Straight-line trajectory parameter v, w
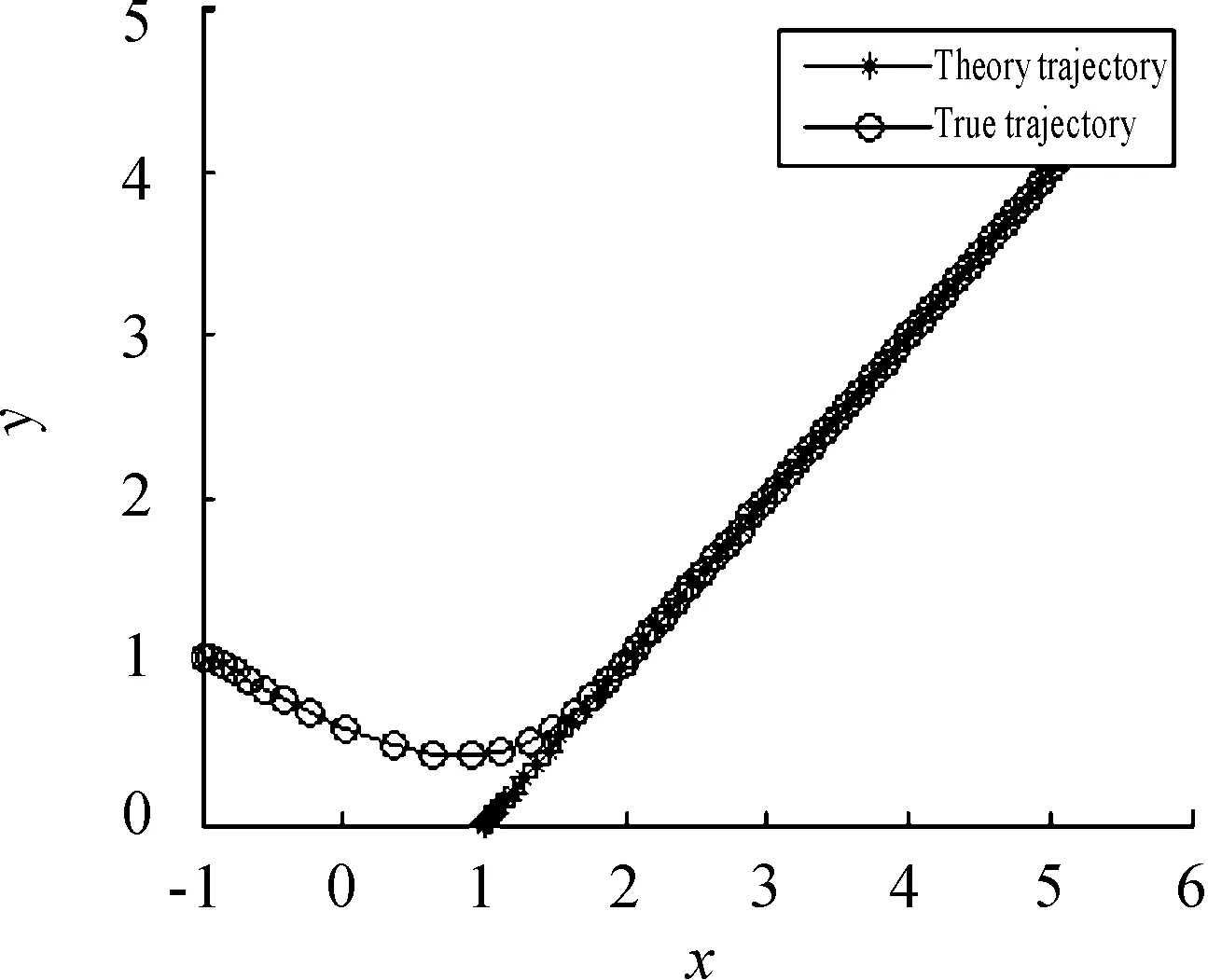
Fig.10 Robot Straight-line trajectory theory and the actual contrast result

ThesimulationmodelInitialerrorxe,ye,θe()Expectspeedvr,wr()Controlparametersk1,k2,k3()ThesimulationresultsCirculararc(1,-1,0.8)(0.8,0.4)(4,8,6)Fig.5~7Straightline(2,-2,0.6)(2,0)(2,7,5)Fig.8~10
6.The experimental conclusions
This paper in view of the actual wheeled robot autonomous movement problems, used EKF as the first of the robot reference to track the optimum estimate, Fig. 3~4, the state of motion in straight lines and curves to estimate the robot trajectory closer to the theoretical, the amount of data is not big enough, hoped to get a better effect in a large amount of data. Therefore, this method has better effect in the general linear and curvilinear motion prediction. Sliding mode controller to optimize the control parameters of the robot in a straight line and curve motion control, with strong robustness, strong anti-interference performance, and the control of the robot to meet the stable and fast requirements.
[1] WANG Yanqing,YE Yanhui,GAO Yanfeng .A stable tracking control method for an Autonomous Welding Mobile Robot[J].Applied Mechanics and Materials,2011(79):264-269.
[2] Divya Aneesh.Tracking Controller of Mobile Robot[C]//2012 International Conference on Computing,Electronics and Electrical Technologies[ICCEET] .Tamil Nadu,India:[s.n.],2012:343-349.
[3] WU Weiguo,CHEN Huitang,WANG Yuejuan.Global trajectory tracking control of mobile robots[J].ACTA AUTOMATICA SINICA,2001,27(3):326-331.
[4] Bolognani S,Tubiana L,Zigliotto M.Extended kalman filter tuning in sensorless PMSM drives[J].IEEE Trans.on Industry Applications (S0093-9994),2003,39(6):1741-1747.
[5] Greg Welch,Gary Bishop.An introduction to the Kalman filter [EB/OL].[2001-09-21] .http://info.acm.org/pubs/toc/CRnotice.html.
[6] WEI Guo,WANG Xin,SUN Jinwei.Method for ultrasonic time-of-flight estimation based on extended Kalman filter[J].Journal of Jilin University (Engineering and Technology Edition),2011,41(3):832-837.
[7] SHEN Wenbin,PEI Hailong.Extended Kalman Filter Based on Support Vector Regression[J].Computer Simulation,2011,28(4):156-159.
[8] Kazem Dastgerdi,Hadi Bidokhti,Assef Zare.Adaptive Sliding Mode Control of Nonlinear Gyro Chaotic Vibration[C]//2012 IEEE Students’ Conference on Electrical,Electronics and Computer Science.Bhopal:[s.n.],2012:1-4.
[9] PAN Yaodong.Variable structure control by switching among Feedback Control Laws[C]//45th IEEE Conference on Decision&Control.San Diego,CA:[s.n.],2006:789-794.
[10] Farzad P,Mattias P K.Adaptive control of dynamic mobile robots with nonholonomic constrains[J].Computers and Electrical Engineering,2002(28):241-253.
[11] XU Jianxin.A quasi-optimal sliding mode control scheme based on control Lyapunov function [J].Journal of the Franklin Institute,2012,349(4):1445-1458.
[12] Kamal S.Arbitrary higher order sliding mode control based on control Lyapunov approach[C]//2012 12th International Workshop on Variable Structure Systems (VSS).Mumbai,Maharashtra.[s.n.],2012:446-451.
[13] Ali Gholipour,Yazdanpanah M J.sliding mode Trajectory tracking control of dynamic nonholonomic systems with unknown dynamics[J].Int J of Robust and Nonlinear Control,1999,9(13):905-922.
[14] Nersesov S G.On the stability and control of nonlinear dynamical systems via vector Lyapunov functions[J].Automatic Control,2006,51(2):203-215.
[15] ZO Huichao,LEI Junwei,YU Hongyun.Extended Lyapunov Stability Theorem and Its Applications in Control System with Constrained Input[C]//International Symposium on Computer Network and Multimedia Technology (CNMT 2009).Yantai:[s.n.],2009:1-4.
基于EKF和Lyapunov函数的移动机器人轨迹跟踪控制
王 静*,蒋 刚
西南科技大学 制造科学与工程学院,四川 绵阳 621010
针对轮式移动机器人在实际运行中受环境因数影响的情况,采用扩展卡尔曼滤波 (EKF) 算法融合里程计与超声波的观测数据,对机器人的参考轨迹信息进行校正。在机器人动力学模型的基础上,运用Lyapunov直接法,构造具有全局渐近稳定的跟踪控制器,对机器人进行轨迹跟踪。根据Lyapunov稳定性定理证明了系统的全局稳定性。仿真结果表明,数据滤波与Lyapunov方法结合的跟踪控制器效果良好。
轮式移动机器人;扩展卡尔曼滤波;Lyapunov方法;轨迹跟踪
TP242
2013-01-10
Postgraduate Innovation Fund sponsored by Southwest University of Science and Technology (12ycjj37);National Natural Science Foundation of China and China Academy of Engineering Physics Mutual Funds Under Grant (NSAF:11176027)*WANG Jing.E-mail:wangjing7840@foxmail.com
10.3969/j.issn.1001-3881.2013.06.013
猜你喜欢
杂志排行

机床与液压的其它文章
- Research and Realization of the Control System for Cement Screw Packing Machine Based on MCGS and S7-200PLC
- The Analysis and Countermeasure of Centrifugal Atomizer Nozzle Block Up
- Static and Dynamic Characteristic Analysis for Vehicle MRF Damper
- Multi-physics Coupling of Hydraulic System
- Research of Production Configuration Management Based on the Internet of Things-mixed Cloud Enterprise
- Research and Design of Embedded Serial Device Server on the DNC System