支持向量机在视频运动目标分析中的应用
2013-12-03邢吉生尚祖飞浦铁成牛国成于哲舟
邢吉生, 杨 礼, 尚祖飞, 浦铁成, 牛国成, 于哲舟
(1. 北华大学 电气信息工程学院, 吉林 吉林 132021;2. 中国科学院 长春光学精密机械与物理研究所光学系统先进制造技术重点实验室, 长春 130033; 3. 黑龙江大学 电子工程学院, 哈尔滨 150080; 4. 吉林大学 计算机科学与技术学院, 长春 130012)
视频监控系统模拟人的视觉系统, 对感兴趣的目标进行特征提取, 并模拟人的大脑分析系统对目标进行分析和识别. 在模拟大脑分析系统时要求计算机不但能根据事先设定的阈值做出判断, 同时还具备学习的功能, 只有这样才能实现真正意义上的计算机智能化[1-2]. 本文基于结构风险最小化的支持向量机模式识别方法对视频中运动目标进行分析, 模拟了人的学习和分析过程, 以达到对运动目标最终做出快速而准确识别的目的.
1 预备知识
先模拟人眼对感兴趣的目标进行提取, 且选取稳定而又能反映物体本质的特征, 用适当的方式表达, 以进行分类识别. 提取特征的准确度直接影响最后的判定结果.
1.1 运动目标提取
所谓感兴趣的目标主要针对运动物体, 这样可去除绝大部分背景, 简化支持向量机的训练难度, 从而保证较高的检测率、 较低的误测率及较快的速度. 但并非所有的运动物体都是感兴趣的目标, 如晃动的树叶和飘扬的旗帜, 同时, 变化的天气和光线也是重要因素.
本文采用混合Gauss模型的背景建模算法[3-4], 该方法对背景的自适应性较高, 在时空效率适中的情况下能提供较精确的背景模型, 再利用背景减除法即可分割出运动物体.
1.2 运动目标预处理
由于噪声及前景空洞的影响, 因此得到的二值化前景图像并不理想, 可利用形态学方法解决, 主要包括腐蚀和膨胀两个基本运算[5-6]. 本文选用3×3和5×5的矩形模板, 通过调节腐蚀膨胀的模板类型、 使用顺序及使用次数, 达到最好的效果. 本文设定连通区域阈值, 小于该阈值的不列为前景运动目标, 利用该方法不仅能过滤掉过小运动目标, 还能消除噪点. 在预处理过程中, 将数据中冗余部分去掉的同时降低了数据的维数, 从而减少建立学习模型的训练时间.
1.3 时间一致性约束
在进行运动目标检测时,会遇到目标遮挡及没有完全进入场景的情况, 此时进行分类通常无法得到准确结果. 时间一致性约束[7]可理解为分类不仅依靠某一时刻的信息, 还要考虑在一段时间内运动物体的变化情况, 即记录在一段时间内不同时刻测量的运动目标, 经过多次假设分类, 统计所有分类信息得到最后结果. 同时, 利用时间一致性约束还能分辨出轻微运动的背景, 如摇晃的树枝, 即通过计算运动物体持续出现的时间, 若小于设定的阈值即视为背景扰乱.
1.4 支持向量机
支持向量机(SVM)是一种基于结构风险最小化原理的有监督统计学习方法, 明显改善了泛化性能差、 容易出现过学习与欠学习等问题[8]. SVM是很好的分类器, 基于小样本学习理论, 并能体现异类样本的差异, 因此在各领域应用广泛. SVM由线性可分情况下的最优分类面发展而来, 其基本思想可用两类现行可分情况说明. 对于平面上的两类可分样本, 机器学习的任务是找到这样一条直线, 不仅能把两类样本分开, 并且保证分类间隔最大. 所谓分类间隔是指从这条直线到两类样本中最近样本的距离之和, 而这些最近距离样本即为支持向量机.
复杂的分类问题可以先通过非线性映射将输入空间变换到一个高维空间, 然后在该高维空间中获得最优分类面. 本文引入非线性映射φ,Rd→H把数据从输入空间Rd映射到更高维的心空间H, 数据在H上线性可分.Rd上的样本集{(xi,yi),i=1,2,…,N}映射得到H, 从而得到新样本集{(φ(xi),yi),i=1,2,…,N}, 然后在H上建立最优分类面. 根据Lagrange方法及Cover定理, 可得超平面决策函数:
(1)
它对于原空间Rd是非线性的. 由此引进核函数K(x,y)=φ(x)·φ(y), 从而只需在Rd上计算K(x,y)即可, 最终的判别式为
(2)
不同的核函数将导致不同的支持向量机算法, 目前主要有多项式、 径向基函数和S型函数3种核函数. 核函数的选择关系到最后分类识别的准确性, 但目前最优核函数的选择仍未完全解决. 惩罚因子C的选择同样重要, 它的取值直接影响训练分类的准确性和推广性. 本文选择径向基函数作为核函数构造支持向量机模型.
2 特征抽取及实验流程
2.1 运动目标特征提取
本文从单帧图片和连续帧两方面进行特征提取. 对单张图片常用形状、 纹理、 颜色等低层特征[9], 而对象的颜色和纹理等特征不蕴含对象的类别信息, 不适用于分类识别, 所以本文主要考虑形状特征. 而对于连续图片提取特征, 要使用跟踪算法确定研究目标, 从而得到其运动中一些特性的变化情况. 本文主要从以下6个特征入手:
1) 高宽比R1=H/W, 其中H和W分别表示轮廓外接矩形的长与宽.R1能很好地描述轮廓的大概外形特征, 不随目标的大小而改变. 一般认为HWR大于1时判定为人, 小于等于1时判定为车辆.
2) 占空比R2=S/SS, 其中:S表示运动目标区域面积;SS表示外界最小矩形面积. 考虑到目标的多角度问题,SS没有直接使用1)中的H×W, 使占空比更准确.
3)R3=(10S1/H)/W, 其中S1为运动目标区域1/10处区域的面积. 10S1/H表示目标区域1/10处的平均宽度, 用于调节局部过宽的情况. 实验表明, 人头部宽度和身体宽度的比值与车顶宽度和车身宽度比例有明显差别.R3是在车型识别中的重要特征.
4)R4=Lmax/Lmin, 其中:Lmax表示质心到轮廓边缘最大值;Lmin表示质心到轮廓边缘最小值.
5) 运动速度R5, 即为质心单位时间内移动的像素距离. 质心的横坐标是对象区域所有像素点横坐标的平均值, 质心的纵坐标是对象区域所有像素点纵坐标的平均值. 通过质心可确定运动目标的位置,R5可判定目标的运动快慢.
6) 对象大小的变化速度R6=(Areak+1-Areak)-(Areak-Areak-1), 其中Areak表示第k帧目标区域的面积. 对于行驶的车辆, 由于外形具有稳定不变性, 所以R6趋于0; 而人在行走时伴随形变, 所以R6值在正负间变化.
2.2 基于支持向量机的运动目标分析
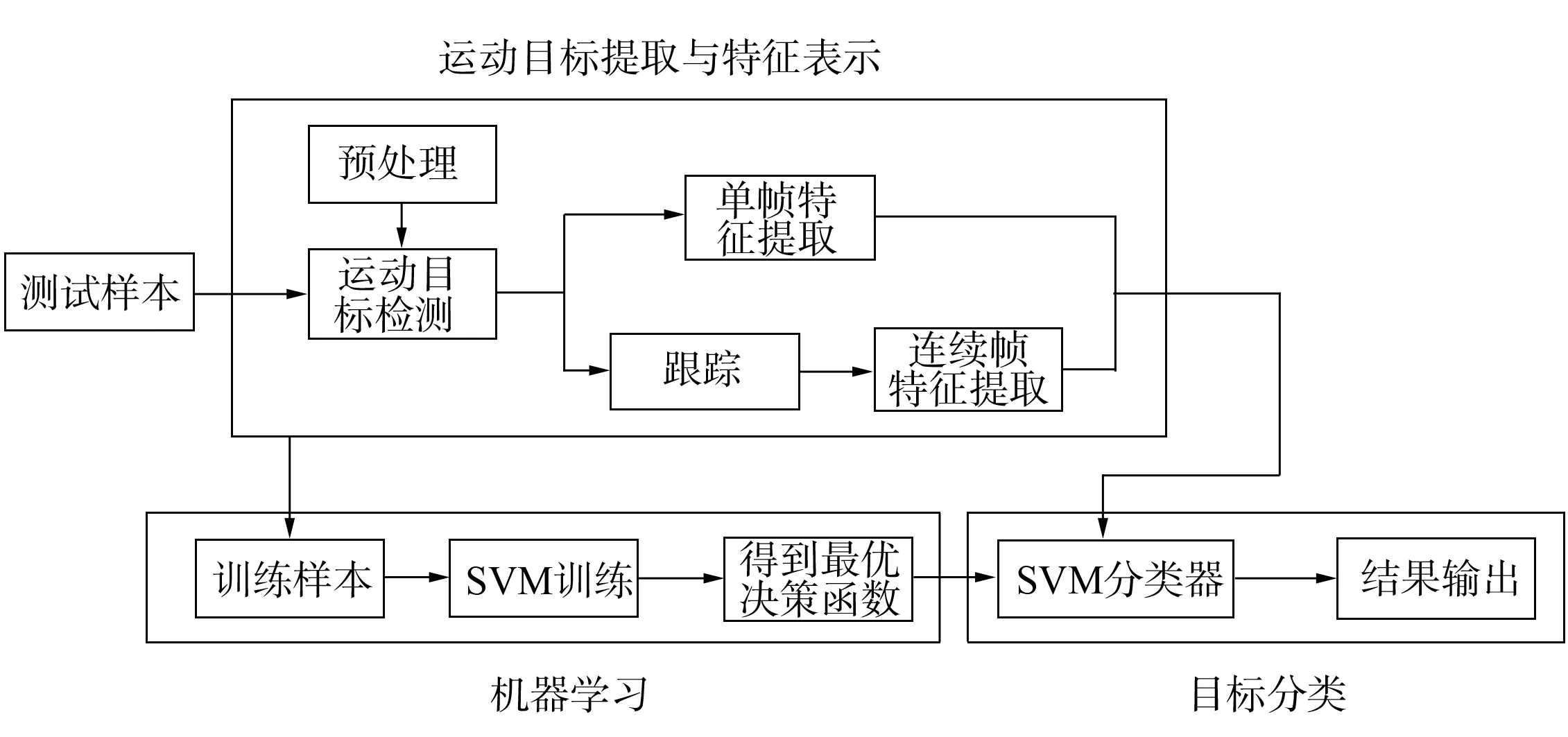
图1 基于支持向量机的运动目标分类原理Fig.1 Support vector machine based moving target classification
基于支持向量机的运动目标分类原理如图1所示. 由图1可见, 在基于支持向量机的运动目标分析中可大致分为3个步骤: 运动目标提取与特征表示、 机器学习及做出最后的类别判定. 在运动目标提取与特征表示中, 通过使用混合Gauss模型进行背景更新, 先利用背景差减法提取运动目标, 再分别针对单帧和连续帧的运动目标提取特征向量(R1,R2,R3,R4,R5,R6); 在机器学习中, 用一组事先标记过的训练集训练支持向量机, 得到最优决策函数. 为了减小样本集的规模, 采用自举方式可以使样本更具代表性, 从而提高分类器的训练速度及分类的正确率; 最后利用训练好的支持向量机对测试集进行运动目标的分类识别.
3 实验结果与分析
实验主要针对静止单摄像机在普通户外场景下目标多角度、 姿态多变化且含少量影子的运动目标, 使用训练软件Libsvm对其进行分类[10]. 为免去手工标注提高工作效率, 从14组视频中抽取1 399张只含有单人或单车的图片作为训练样本, 其中车辆图片542张, 行人图片857张. 本文选择径向基函数作为核函数, 并采用交叉验证方法选择惩罚因子C和核函数的参数g, 其值分别为14.928 52和6.062 87. 先利用这两个最佳参数对选取的训练样本集进行训练, 得到支持向量机模型, 再应用此支持向量机模型对选取的418张测试样本进行类别判定. 测试正确率达到98.086 1%, 其中行人测试正确率为99.586 8%, 车辆测试正确率为96.022 7%. 图2为原始图像及其分类结果. 由图2可见, 由于光线及前景颜色接近背景颜色等外界因素, 会出现运动目标轮廓变形的问题, 从而影响特征向量的提取而影响分类结果的正确率.
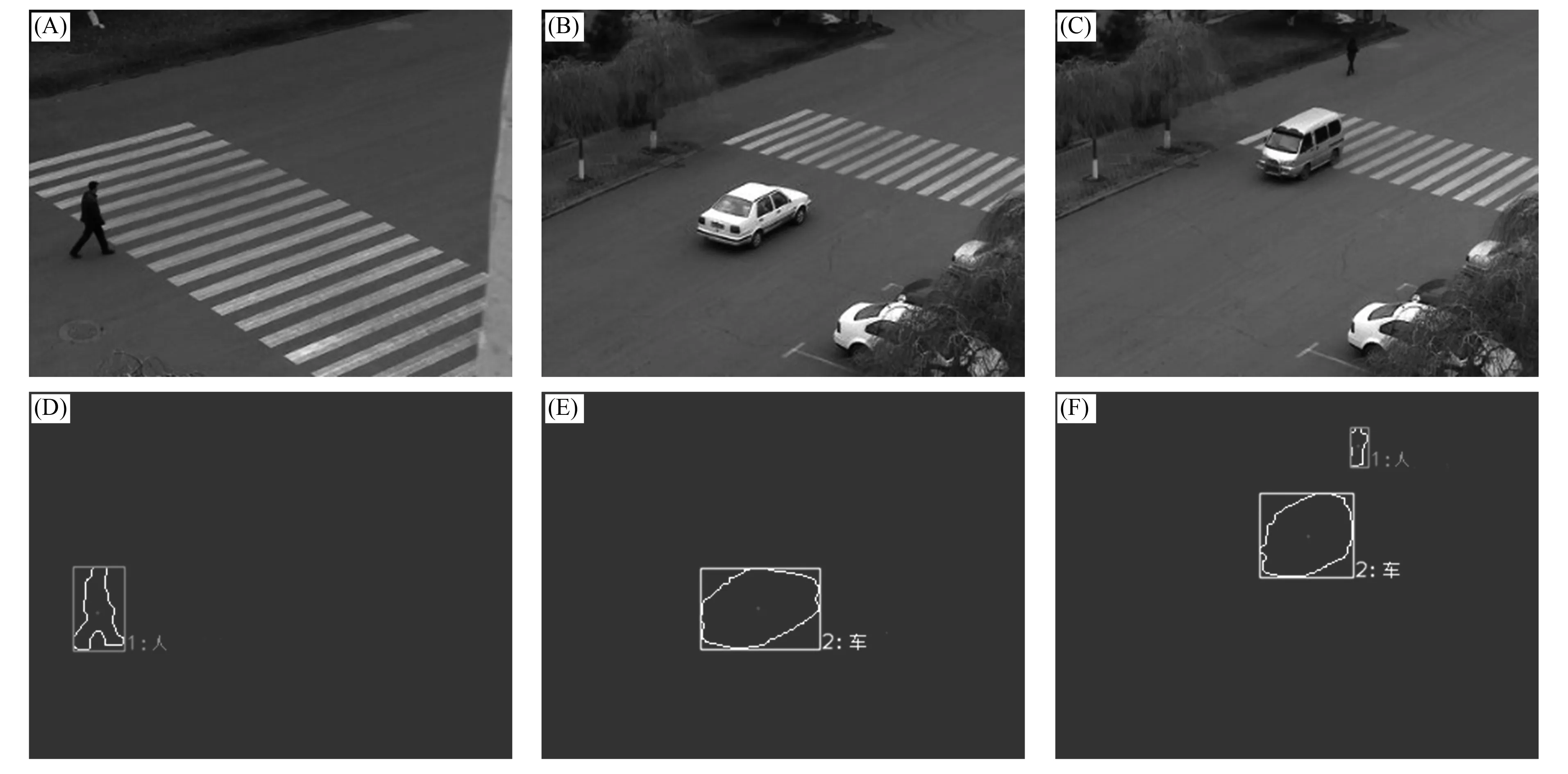
图2 原始图像(A),(B),(C)和分类结果(D),(E),(F)Fig.2 Original images (A),(B),(C) and classification results (D),(E),(F)
综上可见, 本文提出的支持向量机在视频运动目标分析中的应用, 能对车辆和行人作出较准确的分类. 在此基础上可增加相应的特征向量, 对运动目标作出进一步的判断, 如运动速度、 停留时间、 车型判断及人行为分析理解等, 为智能监控的实现奠定基础.
[1] Baidu. On 2010, Chinese Security Video Surveillance Equipment Industry Development Strategy and Competitive Strategy Analysis Report [R/OL]. [2011-11-30]. http://wenku.baidu.com/view/ebf2971ca300a6c30c229f9e.html.
[2] Ekpar F. A Framework for Intelligent Video Surveillance [C]//Proceedings of the IEEE 8th International Conference on Computer and Information Technology Workshops. Sydeny: IEEE, 2008: 421-426.
[3] Stauffer C, Grimson W E L. Adaptive Background Mixture Models for Real-Time Tracking [C]//IEEE Computer Society Conference on Computer Vision and Pattern Recognition. Fort Collins: IEEE, 1999: 2246-2252.
[4] Stauffer C, Grimson W E L. Learning Patterns of Activity Using Real-Time Tracking [J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2000, 22(8): 747-757.
[5] Pratt W K. 数字图像处理 [M]. 李虹, 肖春虹, 李颖华, 等译. 北京: 机械工业出版社, 2010: 428-430.
[6] Shapiro L G, Stockman G C. 计算机视觉 [M]. 赵清杰, 钱芳, 蔡利栋, 译. 北京: 机械工业出版社, 2005.
[7] Lipton A, Fujiyoshi H, Patti R. Moving Target Classification and Tracking from Real-Time Video [C]//Proceedings of IEEE Workshop on Applications of Computer Vision. Princeton, NJ: IEEE, 1998: 8-14.
[8] Cortes C, Vapnik V. Support Vector Networks [J]. Machine Learning, 1995, 20: 273-297.
[9] YU Lin-sen, ZHANG Tian-wen, ZHANG Kai-yue, et al. Review of Indexing Methods for Image Retrieval [J]. Journal of Chinese Computer Systems, 2007, 28(2): 356-360. (于林森, 张天文, 张凯月, 等. 图像检索中的相似性判别及索引方法综述 [J]. 小型微型计算机系统, 2007, 28(2): 356-360.)
[10] Chang C C, Lin C J. LIBSVM-A Library for Support Vector Machines [EB/OL]. [2011-10-14]. http://www.csie.ntu.edu.tw/~cjlin/libsvm/.
