三电机并联驱动系统同步技术研究
2013-11-21边党伟
马 捷,韩 迪,边党伟,胡 鑫
(1.西北机电工程研究所, 陕西 咸阳 712000;2.西北工业大学 自动化学院, 陕西 西安 710029)
交流永磁电机因其具有结构简单、运行可靠、体积小和质量小等显著优点成为目前研究的热点,尤其是在火炮随动系统方面,有很好的应用前景。随着弹炮结合、自行高炮武器系统及压制火炮的发展,对随动驱动系统提出了更大功率和大惯量的需求。由于现代火炮结构紧凑型设计,单个电机随着功率的增大,体积也变得很大,不符合紧凑型的火炮结构设计,并且安装困难,受技术条件的限制,必须采取多电机联动才能满足功率和紧凑型火炮结构的要求。
多电机火炮驱动系统主要用于驱动火炮炮塔运动,为此必须进行同步控制,同步性能受驱动性能不匹配、负载扰动等诸多因素的影响。因此,实现多电机驱动系统的同步运行和具有高的同步性能成为研究的热点,笔者主要研究多电机驱动同步技术[1]。
1 多电机驱动系统组成和原理
采用三电机并联驱动的控制方式,使3台电机具有相同的运行速度,即驱动系统不仅能在匀速运转时达到同步,而且在加、减速的动态过程中,电机也能同步运行。而对于2台完全相同的电机,则对于相同的驱动信号,其输出速度必然相同。据此原理,设计了如图1所示的三电机驱动系统控制模型[2]。
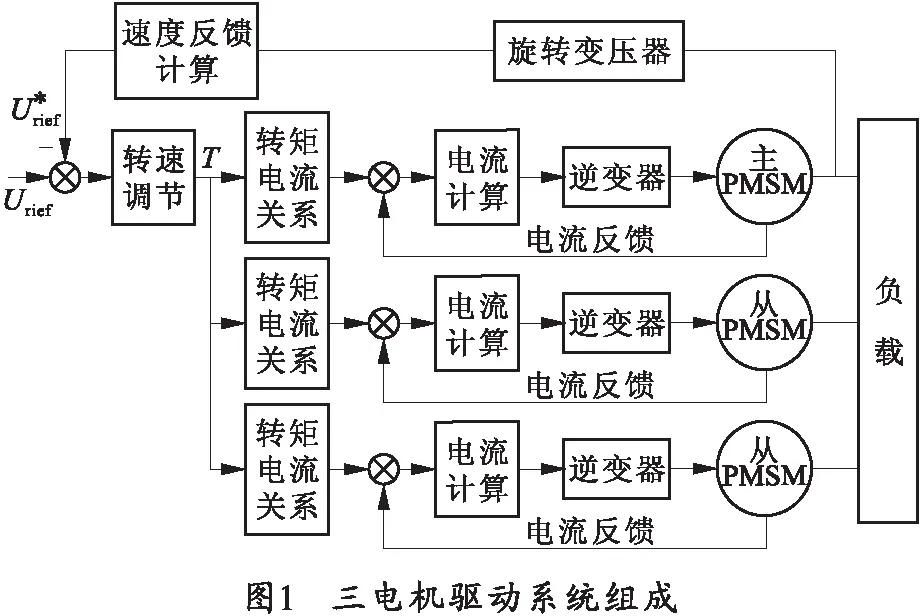
从图1可以看出,多电机交流驱动系统包括3台永磁同步电机。主电机驱动包括速度环和电流环,从电机驱动只包括电流环,且接收主电机的转矩输入,而无速度反馈,这样就保证了3台电机得到的转矩主令相同,都是按照主电机的运动方式来运行,理论上实现同步驱动。
2 三电机并联驱动系统设计
2.1 结构设计
三电机驱动系统同步控制要求电机输出同样的力和转速,这样才能够起到同步驱动炮塔的作用。由于是3台电机,结构上驱动齿轮分别相差120°,装在座圈周围[3],如图2所示。
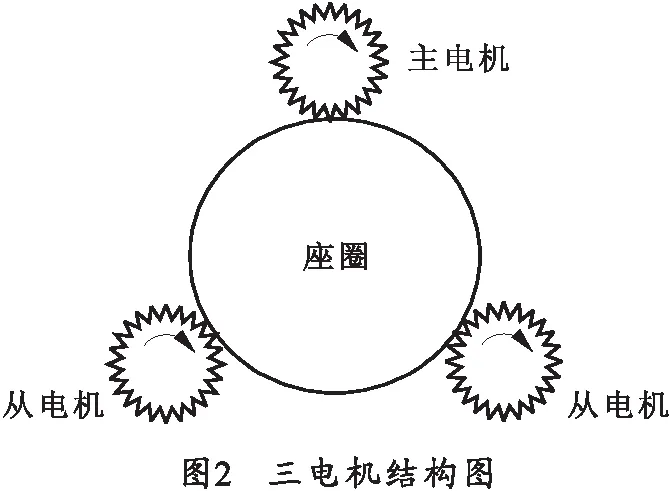
这样设计的原则是让负载的力矩尽可能平分在3个电机轴上,尽量降低负载力矩不均等对三电机同步驱动的影响。
2.2 速度环控制器设计
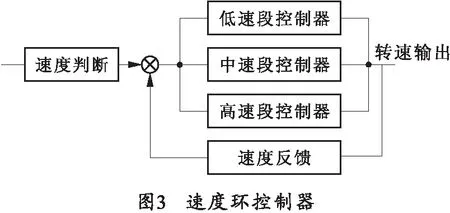
三电机同步联动控制系统相对于普通的伺服系统来说,面对的最主要问题就是三电机速度同步的问题。笔者将3台电机的电流环指令信号并联,将主电机的速度环保留,从电机的速度环断开,保证了3台电机接受的驱动信号完全一致,从而实现三电机同步,为了使三电机具有较高的调速性能,通过调整速度环、电流环参数对电机的调速性能进行调整。这要求速度环具有较高的调速性能和抗扰动性,设计的分段PID控制器如图3所示。
2.3 电流环设计
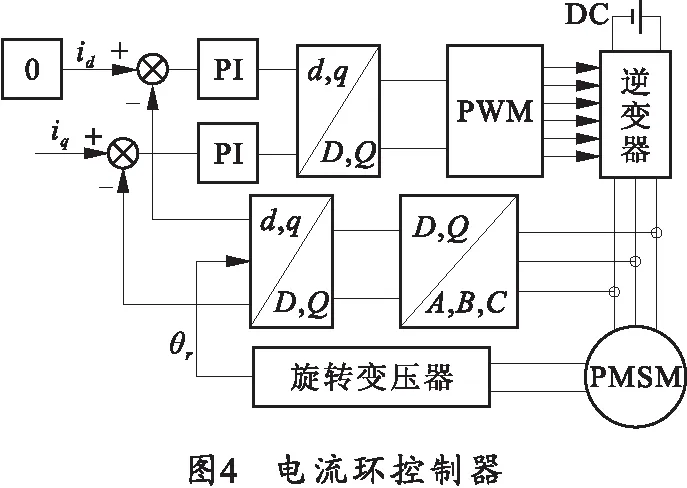
利用id=0矢量控制,如图4所示,d、q为同步旋转坐标系,D、Q为静止轴系。在电流环中利用park变换,park反变换,calark变换,calark反变换,对电流进行2-3-2矢量变换,控制id、iq就可以控制电机三相电流,控制方法简单易于实现,控制性能好[4]。
2.4 差速反馈控制设计
在理想情况下,若2台电机完全相同,则对于相同的指令信号,其输出速度必然相同,然而由于电机等元器件存在离散性,即使是标称参数相同的元器件,其实际参数也不可能完全一致,而且作用在电机上的力矩也不可能完全相同,主电机由于具有速度环,转速对于负载变化具有鲁棒性,而对于没有速度环的两台从电机负载变化会影响转速,因此必须通过一定的控制手段解决多电机同步联动的问题。
检验同步联动效果必须以速度是否同步为依据。这里采用了一种差速负反馈的同步联动控制方案。不失一般性,以双电机同步系统为例,如图5,任取其中一个电机作为主电机,保留其速度环,另一个为从电机,断开其速度环,对每个驱动器而言,输入的电流指令是基本电流给定信号和差速反馈信号线性叠加之后的复合信号。其中两个驱动器的差速负反馈信号大小相等,极性相反[5-6]。
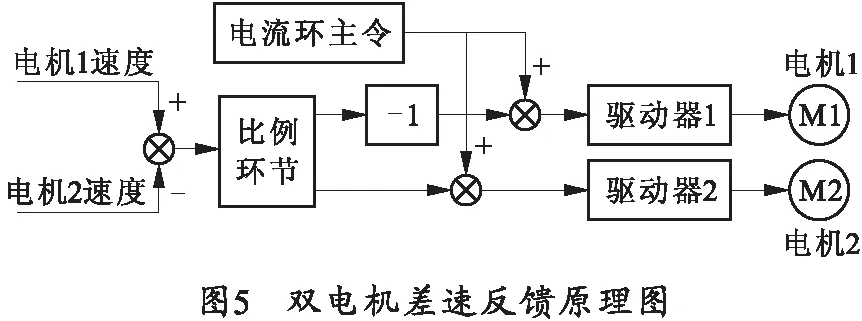
在动态过程中,若2台电机速度不同步,速差经过线性放大之后分别反馈到两电机的电流给定端作为辅助输入,由于电流环的响应要比速度环的响应快得多,所以将差速信号引至电流给定处能尽快地抑制两电机转速的不同步,当电机1的速度大于电机2时,电机1的接收驱动主令就会减小,而驱动器2的驱动主令就会增加,这样就会控制两电机的速度同步[7]。
根据两电极差速反馈原理,研究三电机的同步运行问题,三电机差速反馈控制原理框图如图6所示。
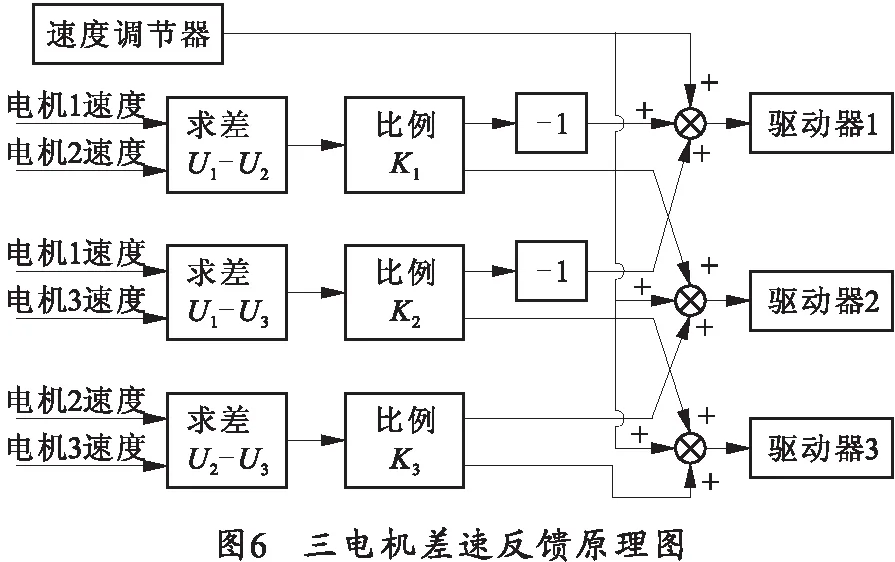
3台电机两两之间进行转速求差,分别与速度调节器输出合成送给3个驱动器。为了保证三电机电机运转同步,其3个比例系数(K1,K2,K3)需要分别进行调整,从而使电机较好的同步。研究发现,差速反馈系数决定着同步性能的好坏,当比例系数太小,3台电机的同步效果不好;当比例系数取值过大,则可能引起并联驱动系统不稳定。而且,由于各电机之间是两两之间取差,每个比例系数都会影响到3台电机的运行。
3 三电机驱动系统仿真
采用Matlab/Simulink建立系统模型,仿真参数如下:3台永磁同步电机参数相同,电机电阻R=6.6 mΩ,直轴电感Ld=0.734 mL,交轴电感Lq=1.74 mH,永磁体磁链ψf=0.192 Wb,极对数p=3,转动惯量J=0.16 kg·m2,额定转速5 000 r/min,逆变器输入电压320 V。由于在仿真情况下,3台电机参数是完全相同的,通过模拟加载在电机轴上的力矩不同来模拟实际中情况。仿真结果如图7和图8所示。
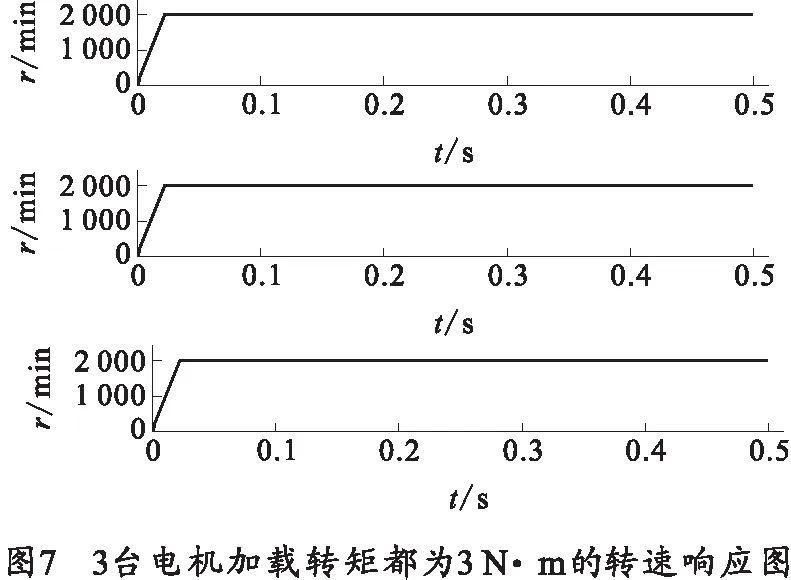
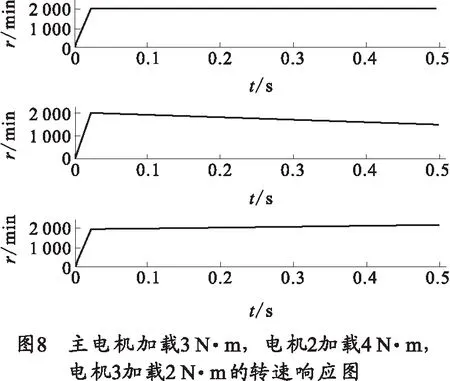
上述仿真可以看到,当电机上负载力矩完全相同时,3台电机能够实现同步控制,但是在3台电机负载力矩各不相同时,图8显示,没有速度环的电机2和电机3,转速出现很大偏差,无法实现同步控制。
为了解决此问题,加入差速反馈控制进行仿真,条件为在0.3 s时刻,分别给主电机加载大小互不相同的转矩,仿真结果如图9~图12所示。
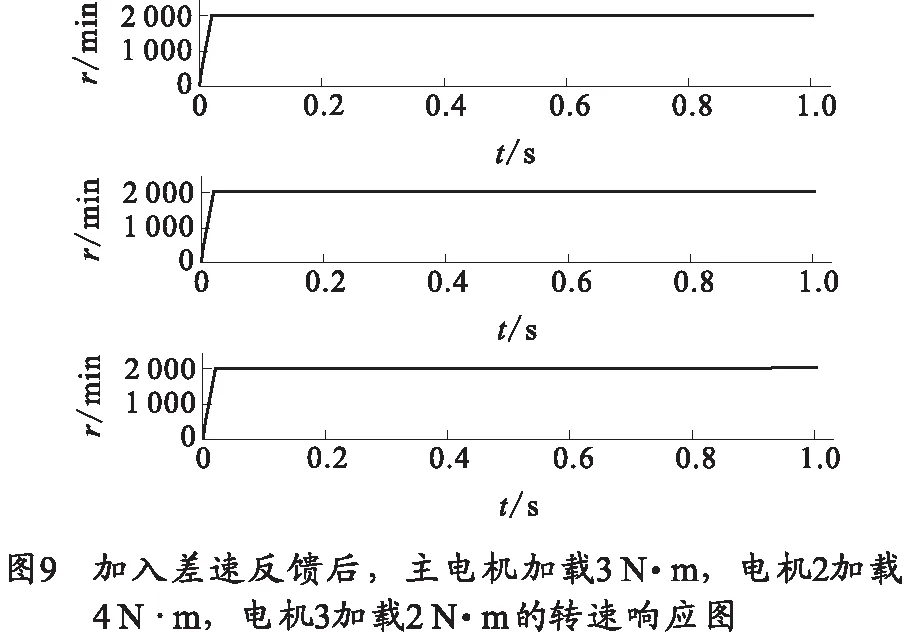
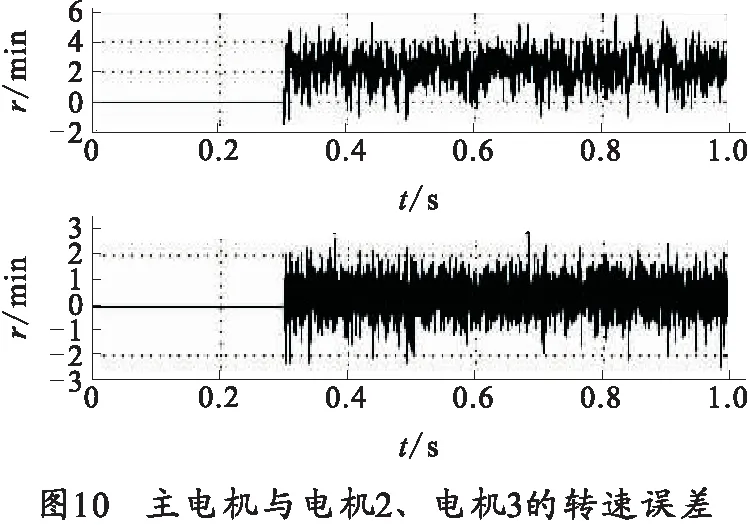
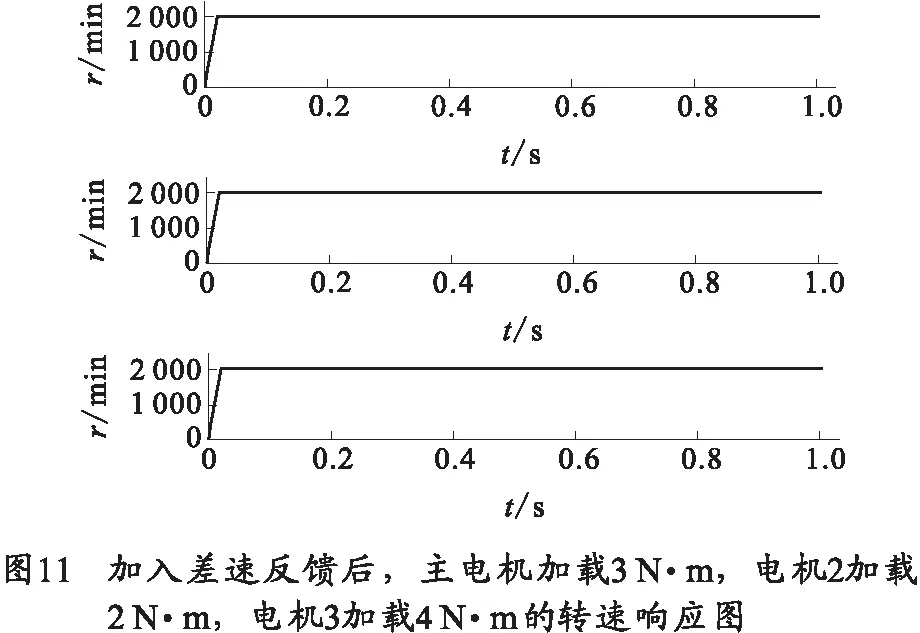
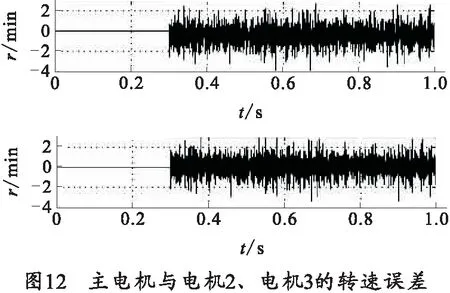
从以上的仿真对比看出,笔者设计的三电机驱动系统同步控制模型能够实现多电机的同步联动,当三电机上负载力矩不同时,利用差速反馈控制可以很好地解决电机不同步的问题。
4 结 论
本文建立了三电机驱动系统同步控制模型,提出了一种主从结构模式,保留主电机的速度环,利用主电机的速度环输出分别作为3台电机的输入,这保证了3台电机接收的转矩主令是相同的,但由于2台从电机没有速度环,机械特性较软,当加载其上的负载与主电机不同时,很难实现同步。基于此问题,笔者提出的三电机差速反馈控制技术,仿真结果表明,该技术解决了3台电机受负载力矩不同时转速不同的问题,并具有较高的精度,具有工程实用价值。
[1] 陈庆伟,郭毓,杨非,等.双电机同步联动控制系统[J].南京理工大学学报,2005,29(10):103-107.
CHEN Qing-wei,GUO Yu,YANG Fei,et al.Double control motor synchronizing drive control system[J]. Journal of Nanjing University of Science and Technology 2005,29(10):103-107.(in Chinese)
[2] 杨非.多电机同步联动控制系统的设计与分析[D].南京:南京理工大学,2005.
YANG Fei.Design and analysis of multimotor synchronized control system[D].Nanjing:Nanjing University of Science and Technology,2005.(in Chinese)
[3] 陈庆伟,郭毓,胡维礼.多电机同步联动系统的动力学分析[J].东南大学学报,2004,34(11):135-140.
CHEN Qing-wei,GUO Yu,HU Wei-li.Dynamics analysis and modeling of multimotor synchronized driving system[J].Journal of Southeast University, 2004,34(11):135-140.(in Chinese)
[4] 王成元,夏家宽,孙宜标.现代电机控制技术[M].北京,机械工业出版社,2009:117-119.
WANG Cheng-yuan,XIA Jia-kuan,SUN Yi-biao.Mo-dern motor control technology[M].Beijing:China Machine Press,2009:117-119.(in Chinese).
[5] 赵海波.双电机驱动伺服系统的控制与仿真研究[J].计算机仿真,2012(3):262-265.
ZHAO Hai-bo.Study on control and simulation of dual-motor driving servo system[J].Computer Simulation, 2012(3):262-265.(in Chinese).
[6] 赵海波,周向红.双电机驱动伺服系统的反步控制[J] .计算机工程与应用,2012(10):242-245.
ZHAO Hai-bo,ZHOU Xiang-hong.Backstepping control of dual-motor driving servo system[J],Computer Engineering and Applications,2012(10):242-245. (in Chinese)
[7] 周超.半筒焊接进给工作台伺服控制系统的研究[D].哈尔滨:哈尔滨工业大学,2007.
ZHOU Chao.Study on servo control system of half-canister jointing step-supply worktable[D].Harbin:Harbin Institute of Technology,2007.(in Chinese)
