无速度传感器异步电机矢量控制研究
2013-11-12曹先庆张丽娟张弼泽
洪 亮,曹先庆,张丽娟,张弼泽,张 虹
(沈阳化工大学 信息工程学院,辽宁 沈阳 110142)
在现代电机控制领域中,无速度传感器异步电机矢量控制技术以去除检测机构和能够降低成本等特点被广泛应用.目前无速度传感器异步电机矢量控制技术中定向控制一般分为转子定向和定子磁场定向,按转子磁场定向的矢量控制虽然实现了定子电流的励磁分量与转矩分量的动态解耦,但转子时间常数是一个随着转子温度变化而改变的系数,使转子磁链难以准确观测[1].而定子磁场定向控制由于定子磁链的计算表达式中可以无需转子转速变量,方便地实现无速度传感器控制[2],但也引入了可变的定子电阻等参数,而最常用的磁链观察法是电压模型法和电流模型法[3].针对目前无速度传感异步电机矢量控制所面临的问题,本文采用加入定子磁场定向思想的转子磁场定向控制,即通过模型公式推导用定子参数去表示并加入补偿以提高鲁棒性.同时采用全阶状态观测器对磁链观测以及电流模型与电压模型结合对速度进行估算.无速度传感器矢量控制系统是双闭环调速系统,需要对调节器的参数进行设计,使其满足系统的性能要求.
1 系统设计
1.1 转子磁链观测
对于无速度传感器异步电机矢量控制技术,进行速度估计首先需要知道转子磁链的大小和位置.由于运用直接检测方法需要安装测量元件,增加成本也使安装过程变得复杂,所以采用间接法,即通过检测的电压、电流或转速并利用数学模型来计算转子磁链的大小和位置[4].
由转子磁场定向控制的基本数学模型可知:

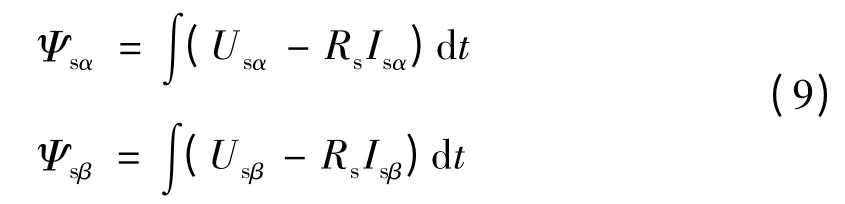
在αβ 坐标下,定子磁链方程:

转子磁链方程:

通过方程(2)、(3)可推导得到在电流模型下的定子磁链表达式:

同理可推导出转子磁链方程:

再根据电压方程,得到在静止坐标系下电压模型定子磁链表达式:

以上公式中,Ψ、L、R、U、I 分别为磁链、电感、电阻、电压、电流,下标α、β、d、q、s、r 分别为两相静止坐标系α-β 以及两相旋转坐标系d-q,定子和转子,Uk为补偿电压.
1.2 误差修正与补偿
因为在推导过程表达式避免不了的会含有电机参数,这些参数如R 和L 等会随着温度和磁链饱和的变化而变化并且增加检测参数噪音,为增加系统的鲁棒性,需进行补偿修正.
补偿电压Uk可通过定子磁链的PI 调节来修正:

电压补偿原理如图1 所示.
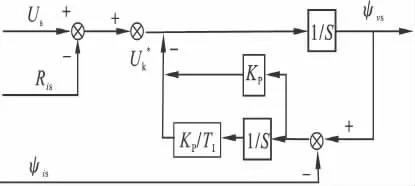
图1 电压补偿原理Fig.1 Voltage compensation principle diagram
根据数学模型可知转子磁链与θr的关系为:

由公式(6)、(7)可计算出定子磁链在αβ 坐标系下的分量,再通过公式(5)求出转子在αβ坐标下的分量,最终由公式(8)求出转子磁链的大小和位置,并且θr角作为反馈为Park 变换提供角度以及公式(1)计算在静止坐标下的转子磁链.
1.3 速度估计
无速度传感器调速系统是通过测量定子的电压值与电流值,测量值经过Clarke 变换、Park变换,通过对变换后的值进行转化可推导出电机的实际转速.当两相同步旋转坐标系按转子磁场定向时,由异步电机的数学模型可得定子在两相静止坐标系下的电压、电流与磁链之间的关系:
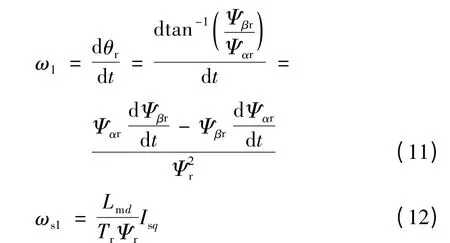
同时由公式(5)可得转子在两相静止坐标的磁链,并且由公式

可求出转子磁链同步角速度、转差角频率:
1.4 PID 参数的整定
电流环在矢量控制系统中是内环调节器,矢量控制系统性能的好坏取决于电流内环的快速性.在电流环的实现过程中,需要注意2 个问题:(1)电流环实现过程中受最大电压利用率的限制;(2)为提高电流环的响应速度要保证电流环具有足够的带宽,本系统使用调节器最佳整定法来整定电流环PI 调节器的参数[5].
由异步电机在同步旋转坐标系下的数学模型可得:

式中:Ts=Ls/Rs是定子时间常数,Tr为转子时间常数.
公式(13)经过变换得:

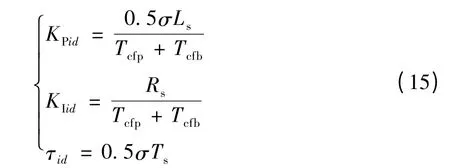
根据最佳整定法,由公式(14)可得d 轴的PI 调节器参数为:
同理可得q 轴的PI 调节器参数为:
式中:Ra=Rs(1+Ts/Tr),Ta=σTsTr/(Ts+Tr),σ 为超调量,延迟时间Tcfb为反馈通道的等效惯性时间常数(等于电流滤波延迟时间和采样延迟时间之和),Tcfp为前通道的等效惯性时间常数(等于整流和逆变功率器件延迟的时间之和),KPid,KIid,τid分别为d 轴电流调节器比例系数,积分系数,调节器超前时间常数,KPiq,KIiq,τiq分别为q 轴电流调节器比例系数,积分系数.
2 MATLAB 仿真
为验证系统设计的正确性与可行性,利用MATLAB 进行仿真,需要设置的电机参数如表1 所示.按表1 所示设置电机参数,然后进行实验,实验运行过程分为2 个阶段,在0~1.75 s时电机空载运行,在1.75~3.00 s 时电机加载运行,同时设定电机转速为120 r/s,其实验运行结果如图2~图5 所示.
表1 电机的数值参数Table 1 Motor numerical parameters
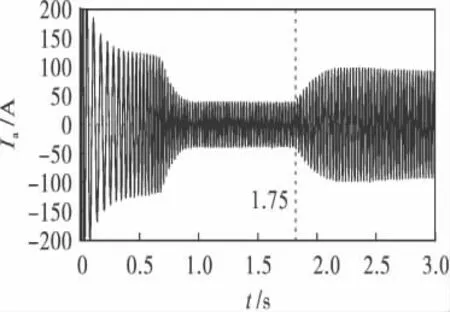
图2 相电流Ia曲线Fig.2 Phase current Iacurve

图3 电机转矩Te曲线Fig.3 Motor torque Tecurve
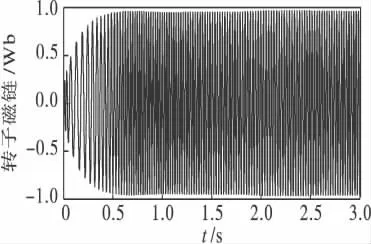
图4 电机转子磁链曲线Fig.4 Motor rotor flux linkage curve
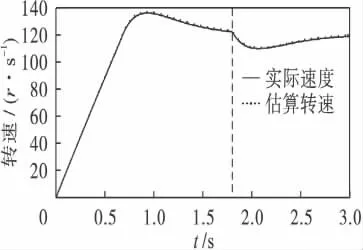
图5 电机转速曲线Fig.5 Motor speed curve
3 结果分析
通过图2~图5 不难发现,电机在0~1.75 s时间内,电机空载运行,开始电流、转矩较大,随着转速的上升,电流、转矩减小,同时转速接近设计值120 r/s,当电机运行1.75 s 时,电机开始进入带载状态运行,转矩、电流都有所回升,同时转速下降,经过PI 自适应调节,电机转速再重新回到120 r/s,同时电流和转矩达到新的稳态,从仿真图可知:电机不管在空载还是带载状态下,系统都可以实现很好的速度估计,估算速度曲线很接近实际转速曲线,因此此方法实现了对电机磁链的观测以及对电机实际转速的估测,可以替代测量机构,并且估算值与真实误差小.
4 结论
从推导数学模型的角度出发,在推导过程中采用一些定子磁场控制的一些思想运用到转子磁场控制中来,并结合电压模型与电流模型的优点,最终得出磁链以及转速的表达式.为提高系统的可靠性,对电机参数进行补偿自适应调整,以及对PI 参数的最优化换取,通过MATLAB 仿真搭建系统模型,测得实验室数据和图表.从实验图表中可以看出最终电机实际转速与之前设计的转速极为接近,误差小,所以此转速估计算法可以在实际应用中代替测量机构对转速进行估计,同时也验证了系统的可行性与实用行,得到一种结构简单、推导过程清晰易懂的实用性磁链观测与速度估计方法.
[1]阮毅,张晓华,徐静,等.感应电机按定子磁场定向控制[J].电工技术学报,2003,18(2):2-4.
[2]Lee J S,Takeshita T,Matsui N.Stator-flux-oriented Sensorless Induction Motor Drive for Optimum Low-speed Performance[J].IEEE Trans.On I.A,1997,33(5):1170-1176.
[3]张伟.无速度传感器异步电机矢量控制系统控制方法的研究[D].浙江:浙江大学,2001.
[4]王晓明.电动机的DSP 控制[M].北京:北京航空航天大学出版社,2009:134-135.
[5]陈伯时.电力拖动自动控制系统[M].北京:机械工业出版社,2008,97-101.
