基于系统工程的航天多级网络计划进度管理
2013-11-06陈琼姣
曹 磊,陈琼姣,陈 凡
(北京神舟航天软件技术有限公司,北京 100094)
项目进度管理是项目管理的重要组成部分,它可以帮助项目管理人员制定切实可行的项目进度计划,获取项目计划的关键路线及关键任务,实现项目进度控制,从而确保项目目标的实现[1]。随着科学技术的发展和国防工业的需要,大型国防工程项目如航天型号研制,规模越来越大,协作关系也日趋复杂,高技术、高投入、高风险、高复杂性等特点越加明显,因此将现代项目进度管理自觉地应用于航天工程项目管理已成为航天工业发展的必然[2]。
我国航天工业在快速的发展中形成了不同于西方发达国家、也不同于其他传统行业的特征,这就注定了我国航天产品项目进度计划分析具有值得关注的自身特点。虽然我国航天型号研制正在逐步地引入进度管理,然而项目规模庞大、参与单位众多、分布式协作管理、多项目并行展开等特点,使其进度管理方法面临着诸多问题,例如,在进度计划的制定过程中,如何充分考虑项目管理组织结构间的分级关系,如何从宏观上了解项目进度情况并将进度变化及时地反映到计划中等等。因此,结合航天型号研制的特点,采用系统工程的思想对项目进度进行分析和优化是十分必要的。
1 航天项目及计划特点
1.1 航天型号项目特点
航天型号项目是多学科、多专业有机结合的大规模系统工程。它投资巨大,技术复杂,综合性强,协作面广,研制周期长,质量和可靠性要求高,风险大,管理难度大。总结我国航天型号项目管理几十年来的经验,航天型号项目一般具有以下几个特点:
a.集中型国家科研管理体制。航天型号项目为集中型国家科研管理体制,型号项目任务一般是由国家统一领导、决策,并以指令性计划下达执行,其研制所需经费多由国家统一拨付。
b.项目三级管理体系。为适应航天型号工程研制的需要,航天系统建立了以集团公司、研究院、研究所和配套工厂为实体的科研、生产、试验一体化的三级管理体系。
c.统一的型号研制过程模式。航天型号项目具备统一的型号研制过程模式,按型号的发展过程,分为规划、可行性论证、工程研制、生产4个大的阶段。在工程研制和生产阶段,通过模样(原理样机)、初样(初步设计产品)、试样、正样等过程的设计、试制生产和试验工作,使型号产品由初级逐步达到成熟,最后完成定型。
1.2 航天项目计划特点
航天研究院在多年的航天型号项目计划管理过程中,形成了一套较为完备的计划管理体系。以航天某总体院为例,近年来,通过建设和应用计划管理系统,将传统的纸制、多本、多级计划转变为型号全生命周期的、多个单位的“一本计划”,以统一的型号全生命周期WBS(Work Breakdown Structure,工作分解结构)的方式予以体现。
在统一的WBS构架基础上,形成了分级计划管理模式,一般分为顶层计划(国家指令性计划、集团考核计划、里程碑计划或院考核计划)、单位接口计划(型号办考核计划、项目配合单位之间的交接点)、执行计划(厂所计划、处室计划等单位内部执行计划)三级。各级计划间遵循逐级负责的原则,执行计划满足单位接口计划的要求,单位接口计划满足顶层计划的要求。
2 航天型号项目进度管理中面临的主要问题
基于航天型号项目和航天项目计划特点:航天型号项目进度管理除了应具备一般进度分析的基本功能外,还必须满足其多级管理、分级管控的项目管理要求。因此,航天型号项目进度管理面临的问题主要有两方面。
a.需提出适应航天型号管理的分级网络计划模型。如上所述,航天型号研制项目为多级管理、分级管控模式,上级计划对于下级计划是强指令性要求,体现了系统工程中大系统对于子系统的约束;同时不同级别的项目计划由于管控主体不同,项目计划的动态调整受到业务审批流程的制约。因此,面向航天系统工程的网络计划分析模型与通用的网络计划分析模型有很多不同之处,必须在充分研究航天型号项目的管理特点和国内外项目管理经验的基础上,找出适用于航天型号项目进度管理的网络计划模型来制定进度计划。
b.实现型号网络计划及可视化。航天院所在项目管理实践过程中积累了型号计划的WBS模板,在计划编制过程中通过各职能部门编制计划等级的划分形成了可执行的型号研制计划,但是计划之间基本没有设置任何的前后置关系,没有形成网络计划,更没有实现网络计划的可视化。在多任务同时开展的情况下,各层级的项目管理领导希望直观地、一目了然地看到项目的整体态势,直观动态地看出项目中一些重要节点的状态,这就要求系统实现网络计划及可视化。
3 基于航天型号项目特点的多级网络计划
针对航天单位项目管理的多级管理、分级管控模式,航天型号项目计划基于系统工程及管控要求层层分解、逐级细化等特点,本文提出了面向航天型号的多级网络计划模型进行进度控制,将项目的进度分解成多个不同层次、相互关联制约的网络计划的集合,从而对网络计划进行综合、总体的控制,以达到有效管理项目进度的目的。
3.1 多级网络计划建模
3.1.1 多级网络计划模型
通过构造项目的全局网络计划模型,来描述WBS树形结构与任务逻辑关系,这样构造的网络计划模型不需要降低任务间的耦合度,可以完整地描述任务之间的层次关系和逻辑关系。按项目管理粒度的需要,对项目计划进行分级,顶层即是项目总体,下层由若干个子项目和活动组成,在子项目层上可根据需要再进行分层,从而组成一个多级网络计划模型[3]。
a.多级网络计划的控制流C与文档流D。
每一级网络计划中的控制流C和文档流D都可表示为多元组的集合:

其中 ci={fromi,toi},fromi和 toi为本网络计划中的子网络或活动,ci表示fromi结束后toi才能开始。

其中:di{fromi,toi,documenti},di表示从 fromi到toi传递documenti文档。
b.活动T。
构成项目的最底层元素活动T可以表示为一个四元组:

其中:ManID表示负责该活动的人员;Resource表示活动占用的资源;DesignDur Time表示活动的设计持续时间;Trigger表示活动结束后的触发器。
c.多级网络计划模型。
项目网络计划P可以分解由n个网络计划P0i与m个活动Toj以及它们之间的控制流C0、文档流D0和开始节点S0、结束节点E0构成的0级网络计划,即:

其中每一个P0i还可进一步分解为由ni个网络计划P1ij与mi个活动T1ik以及它们之间的控制流C1i、文档流D1i和开始节点S1i、结束节点E1i构成的1级网络计划,即:

式中:P为0级项目,即总项目;P0i为1级项目;P1ij为2级项目。
按以上方式,对项目计划进行逐层细分,直至项目被完全分解为只包含活动而不包含任何子网络计划的末级网络计划。
分级网络计划模型如图1所示。
由于每个任务在WBS层次结构中都有相应的大纲级别,摘要任务和其子任务之间有时间制约关系,即摘要任务的开始时间不得晚于其任意子任务的开始时间,完成时间不得早于其任意子任务的完成时间。
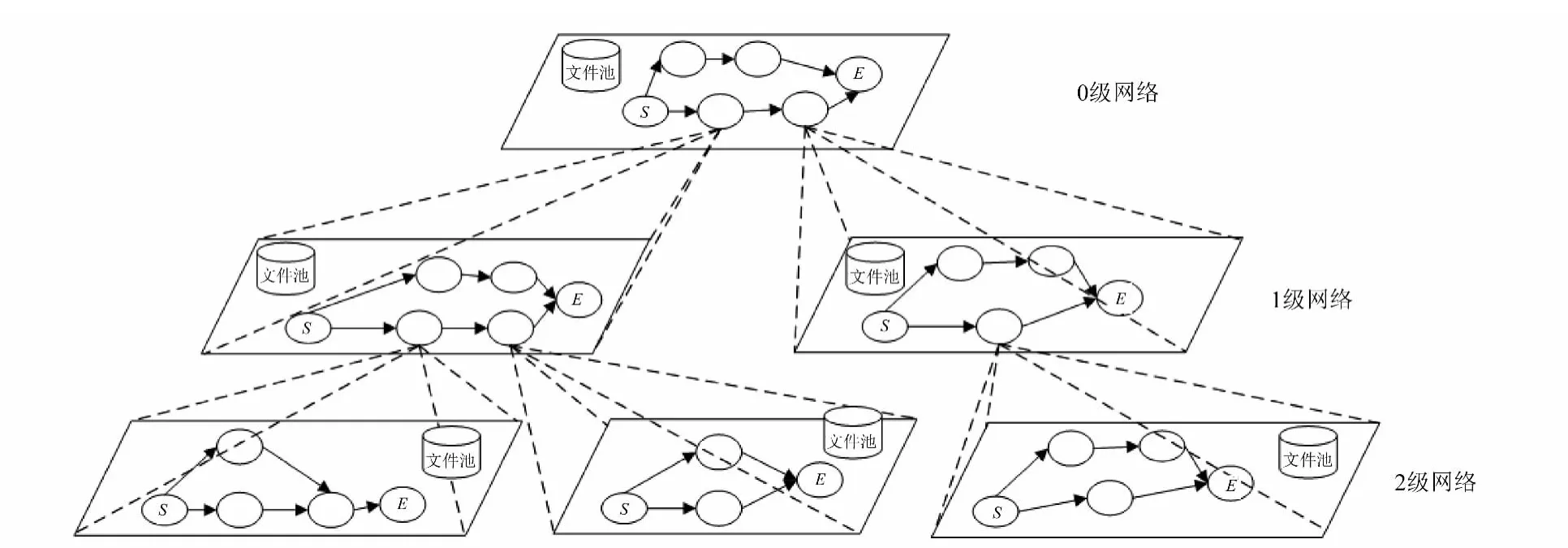
图1 航天型号项目的分级网络计划模型
这样就得到了单个项目的网络计划,企业所有项目分布于EPS(EnterpriseProjectStructure)树形结构中,从某种意义上来说,EPS可以看作宏观的WBS,WBS的末级节点是具体的作业,而EPS的末级节点是具体的项目。所以,多个项目就可以通过EPS层次关系联系起来,从而可以通过WBS层次关系转化的方法将EPS层次关系在网络计划中描述,根据企业统计分析的需要或项目相关的程度,可以选择EPS中不同的层次构造网络计划,这样就可以构造出涵盖企业EPS中任意层级以下多个项目的全局网络计划。
3.1.2 多级网路计划模型的特征
通过以上方法构造的面向航天型号项目的分级网络计划模型,具有以下特征和优势:
a.各子网络除开始和结束节点外不再与其父网络发生其他关系,另外同级网络之间也不直接发生联系,从而使得级与级之间在结构上的联系非常少,可以做到互相独立各自进行计算,其中任一级的网络发生变动,各级涉及部分的改动量都非常少。因此使得各子项目负责人可以相对独立地给自己的子网络增加活动、合并活动或修改活动的持续时间,这为项目管理提供了方便。
b.可实现项目计划的分级制定,即计划的制定过程不是一步到位,而是由多人参与的不断细化的过程。每级项目的管理者只负责本级网络计划的制定,这样可以将各个层次的人员都引入到计划制定过程中,从而使网络计划更加精确,提高网络计划的可执行性。
c.当计划的实际执行情况与原计划产生偏差时,可以仅在各级网络计划上进行调整,从而缩小了调整影响面,减轻了调整、修改和增加活动对其他活动或关键线路的影响。通过以上特征分析可以看出,航天型号项目的分级网络计划模型适合航天复杂工程项目计划管理,符合航天计划编制原则——“0级、1级网络原则上不调整,2级网络少调整,3级网络可调整”的基本原则,这样大部分的计划调整工作只在个别的2级、3级网络中单独调整,从而尽量不影响总体网络计划,保证项目的如期交付。
3.2 多级网络计划拓扑排序
分级网络计划建立完毕后,对位于各层的网络进行拓扑排序,拓扑排序的目的是将某个集合上的一个偏序排序得到该集合上的一个全序,依拓扑排序的含义,在图的拓扑有序序列中,任一顶点的所有的前驱顶点都排在该顶点的前面,所有后继顶点都排在其后。因此在拓扑有序序列中,对任一工作开始时间有影响的工作都位于该作业之前,所有受该工作影响的工作都排在其后。拓扑排序以后按排序序列的顺序计算工序最早时间,按逆序计算工序最迟时间[4]。网络计划拓扑排序方法如下:(1)从网络中选择一个没有紧前工序的工序。(2)选出所有以(1)中选出的工序为紧前工序的工序,将(1)中选出的工序从网络中剔除。(3)重复(1)和(2),直到所有工序全部从网络中剔除,或者网络中不存在无紧前工序的工序,后一种情况说明网络中存在环。(4)若网络中没有环,输入的工序排序为网络拓扑排序;若网络中存在环,需要检查网络计划,修改后重新进行拓扑排序。
在设置逻辑关系时要进行逻辑关系环路检测,也就是网络计划拓扑排序后不可以出现环路。检测的方法通常是若网络图中所有定点都在它的拓扑有序序列中,则该网络图必定不存在环,否则存在环路,需进行打破环的操作。
3.3 多级网络进度计算
分级网络计划建立后需要计算时间参数。这里包括网络内的时间参数计算以及网络间协调两个过程。网络内时间参数的计算需要确定项目的WBS、任务的逻辑关系以及每一项任务的开始和完成时间,确定后计算网络计划的最早开始时间(ES)、最早完成时间(EF)、最迟开始时间(LS)、最迟完成时间(LF)和总时差(total float)(是指在不影响总工期的前提下,本工作可以利用的机动时间)。在网络间协调方面,从上述构造的航天型号项目多级网络计划模型中可以看出,网络计划层级之间有严格的时间约束[5]。记P为某级子网络计划,其中工作pi对应的下层网络计划为Si,P中工作pi的工期为T(pi),Si的计算工期为T(Si)。因而需满足条件:
影响工作pi最早开始时间的因素有:
a.外部约束条件,当K为Si的起始工作时,SiES(K)=GES(pi)其中SiES(K)为子网络Si中K的最早开始时间;GES(pi)为上层网络P中pi的最早开始时间。
b.P中pi的紧前工作最早开始时间的影响,GES(pi)=max{GES(pj)+ZTji},其中pj为pi的紧前工作。
同理影响工作pi最迟完成时间的因素有:
a.外部约束条件,SiLF(K')=GLF(pi),其中K'为Si的结束工作。
b.P中pi的紧后工作最迟完成时间的影响,GLS(pi)=min{GLS(pj)-ZTji},其中pj为pi的紧后工作。
3.4 多级网络计划关键路径搜索
计算出多级网络计划中所有工作的时间参数后,可以找到总时差为0的工作,即可得到关键任务集合。自起点到终点全部由关键任务链接而成的路径就是关键路径,关键路径有如下性质:(1)关键路径可能有多条。(2)关键路径是总持续工期最长的线路。关键路径上任务的工期之和等于项目的计算工期。
4 结束语
本文所进行的基于系统工程的多级网络计划进度分析研究,仅针对航天型号计划多级管理域中计划下达规范、计划调整范围限于单级网络计划、型号项目间耦合关系忽略不计、多级计划处于同一管控域不需要考虑多个计划管理域数据同步策略的情况。而在航天型号项目研制的实际过程中,部分型号项目计划管理面临的情况更加复杂、多级网络计划的分布更加多样(有时同一型号项目计划分布在相对独立又存在联系的两级管理域中,需要根据管理要求制定数据变化的同步、交互策略),部分型号项目同类计划任务之间的耦合关系紧密(如各型号项目中的生产和试验类工作)等,因此这一类航天型号项目计划的进度计算要考虑的进度参数要远多于本文模型中涉及的进度参数量,其计算难度也更大,对模型的要求也更加复杂。这种情况下,要解决航天型号项目进度管理面临的问题,需要结合型号项目管理实际情况,从管理要求和分析方法两方面同时入手,通过大量逐步深入的理论探索和实际应用作更进一步的研究。
[1] 邱苑华.项目管理学——工程管理理论、方法与实践[M].北京:科学出版社,2001.
[2] 何少华.航空产品项目管理进度计划技术研究[D].西安:西北工业大学,2004.
[3] 徐志勇.航空产品项目计划及监控技术研究[D].西安:西北工业大学,2007.
[4] 王静波.军机改进改型项目时间管理研究[D].西安:西北工业大学,2001.
[5] 王俊.航天型号项目进度管理技术研究和系统实现[D].北京:北京信息控制研究所,2008.
