特征向量矩阵条件数对状态反馈控制的重要影响
2013-10-29任国清
任国清,鲍 伟,2
(1.安徽江淮汽车集团有限公司 博士后科研工作站,安徽,合肥 230601;2.合肥工业大学机械工程 博士后科研流动站,安徽,合肥 230009)

现有的用状态反馈控制配置特征值的文献很多[4-14],但除了文献[4]、[7]和[8]以外,都没有提到特征向量的配置。其中文献[4]利用状态反馈控制中特征向量的配置存在自由度,以特征向量矩阵的条件数为适应度函数,采用粒子群算法进行优化,同时对粒子群算法进行改进,从而获得较小的特征向量矩阵的条件数。文献[7]提出了按照单秩和双秩的方法对特征向量进行配置。文献[8]提出将特征值和特征向量配置成解耦的方法。
本文将进一步从线性连续定常系统的响应和反馈控制矩阵Frobenius范数两方面入手,深入分析特征向量矩阵的条件数对状态反馈控制的重要影响。
1 预备知识


2 特征向量矩阵条件数对状态反馈控制的重要影响
2.1 特征向量矩阵的条件数与零输入响应的关系
定理1[16]:在线性连续定常系统初始状态和特征值已经确定的情况下,系统特征向量矩阵的条件数决定系统变量零输入响应的上限。
证明:考虑线性连续定常系统状态变量的零输入响应的表达式
式(5)两边取范数可得

所以
由式(9)可知,在初始状态和特征值已经确定的情况下,系统的特征向量矩阵的条件数决定系统变量零输入响应的上限,证毕。
2.2 特征向量矩阵的条件数与状态反馈矩阵Frobenius范数的关系
定理2:在线性连续定常系统特征值已经确定的情况下,系统特征向量矩阵的条件数决定反馈矩阵Frobenius范数的上限。
证明:用状态反馈控制配置特征值和特征向量的问题可以表述为
式中,K为反馈控制矩阵。
对系统矩阵(A,B)进行Householder变换,可得到系统的能控海森堡型矩阵[5]:
则根据式(11)和(12)整理可得
式(13)两边同取Frobenius范数,有
由此可见,在线性连续定常系统的特征值已经确定的情况下,反馈矩阵K的Frobenius范数的上限由特征向量矩阵的条件数决定,证毕。
2.3 两条定理的意义及说明
文献[5]指出,线性连续定常系统渐近稳定的充分必要条件是该系统对于任何初始状态x(0)的零输入响应eAtx(0)趋向于0。系统的零输入响应达到稳态值之前的暂态过程越平稳,系统的性能越好。所以结合定理1可知,特征向量矩阵条件数越小的系统,就越容易把系统的零输入响应控制在一个较小的范围内,其暂态过程必然就越平稳,系统的性能也就越好。
同时文献[5]指出,反馈矩阵K的Frobenius范数越小,系统的稳定性就越强,系统发生故障的可能性也就越小。所以结合定理2可知,特征向量矩阵条件数越小的系统,就越容易把反馈矩阵K的Frobenius范数控制在一个较小的范围内。
值得注意的是,根据上述两条定理,特征向量矩阵的条件数只规定了系统零输入响应和反馈矩阵范数的上限。因此即使特征向量矩阵的条件数比较大,仍可能存在较小的系统零输入响应和反馈矩阵的范数。但是这并不意味着上述两条定理及推论没有实际意义。因为如果能够获得条件数较小的特征向量矩阵,就能够很容易地把系统的零输入响应和反馈矩阵的范数控制在一个较小的范围内,从而降低控制的难度,获得较高的性能。同时目前没有任何算法可以保证在特征向量矩阵的条件数较大的情况下仍能获得较小的系统零输入响应和反馈矩阵的范数。
综上所述,基于定理1和定理2的结论,本文提出以减小特征向量矩阵的条件数为目的来设计状态反馈矩阵。同时文献[4]、[7]和[8]也给出了降低特征向量矩阵条件数切实可行的方法。
3 仿真实例及分析
3.1 仿真实例
本文给出一个示例性的仿真实例,该仿真实例的思想和算法可以推广到具有线性连续定常系统特性的汽车控制系统中,仅仅是数值和系统维数的差异。已知线性连续定常系统的状态空间描述为
式中,
3.2 基于粒子群的特征向量的配置
为了能够得到不同的特征向量配置结果进行对比分析,采用基于粒子群的算法[4,17]对特征向量进行配置。通过设置不同的迭代次数,就能得到条件数大小不同的特征向量矩阵,从而得到不同的状态反馈矩阵。文献[5]指出,对于下式
描述的特征值和特征向量的配置,可以表述为
或
将所有的线性组合系数组合成下式
并带入到式(18)中,则最终的特征向量矩阵V 和反馈增益矩阵K 为
粒子群特征向量配置算法步骤如下[4,17]。

步骤2:初始化粒子群,随机生成N个粒子,粒子的结构由式(19)所决定,每个粒子的维数为n×p维。选取粒子的位置和速度为[-1,1]上的随机数。考虑到自由度可以是实数范围内的任何值,所以不限制粒子的位置和速度。
步骤3:按照式(22)和式(23)对粒子的速度和位置进行更新,从而产生N个新粒子。
步骤4:确定粒子xi目前搜索到的最优解Pid和整个粒子群目前搜索到的最优解Pgd。若达到迭代次数则跳转到步骤4,否则按照步骤3继续更新。
步骤5:将最终的最优解Pgd对应的粒子位置cgd带入式(18)~(21),计算特征向量矩阵V和反馈增益矩阵K。
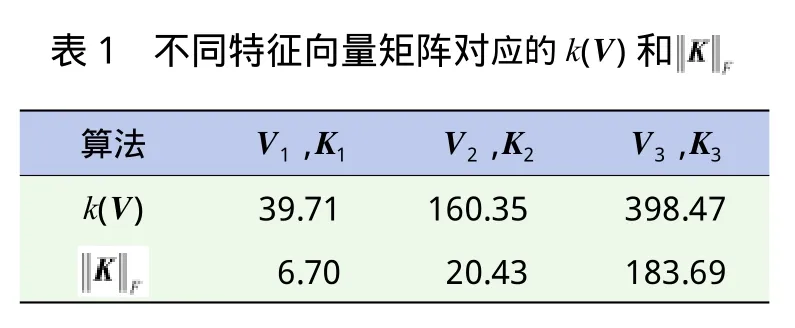
通过设置不同的迭代次数,就能得到条件数大小不同的特征向量矩阵,从而得到不同的状态反馈矩阵。为了便于比较,本文给出3种不同的配置结果,每种结果都能将反馈系统的极点配置到期望的极点上,但各配置结果的特征向量矩阵和反馈控制矩阵是不同的,因此特征向量矩阵的条件数也不同。
?

3.3 仿真及分析
3.3.1 零输入响应的仿真及分析

从图中可以看出,由于V1的条件数较小,因此容易得到较为平稳的系统状态变量的零输入响应。而V2和V3的条件数较大,且不能保证获得平稳的零输入响应。如图2和图3所示,特征向量矩阵条件数越大的系统,其零输入响应的峰值越大,暂态过程越不平顺。
3.3.2 控制系统抗参数摄动的仿真及分析
以改变控制输入矩阵B的值作为控制系统参数摄动的一种方式,来观察3种系统的鲁棒稳定性。对于K1所对应的反馈系统,让矩阵B中的每个元素依次减少5%、10%和18%,即B变为0.95B、0.9B、和0.82B。图4~7是K1所对应的反馈控制系统状态变量的单位阶跃响应曲线。
再对K2和K3所对应的状态反馈控制系统进行类似的仿真,其状态变量的单位阶跃响应分别如图8、图9和图10、图11所示。
综上所述,由于V1的条件数比较小,所以很容易将系统的零输入响应和状态反馈矩阵K1的Frobenius范数控制在较小的范围内,从而获得较好的性能和抗参数摄动的鲁棒稳定性。仿真试验进一步说明以减小特征向量矩阵的条件数为目的来设计状态反馈矩阵的思路是十分有效的。
4 结论
本文从理论上分析了状态反馈控制特征向量矩阵的条件数对状态反馈控制的重要影响。在目前没有任何算法可以确保在特征向量矩阵的条件数较大时仍能获得较小的系统零输入响应和反馈矩阵的范数的情况下,尽可能地减小特征向量矩阵条件数去设计状态反馈控制是十分必要并有积极意义的。同时本文设计状态反馈控制的思想可以推广到具有线性连续定常系统特性的汽车控制系统中,从而在一定程度上改善系统动态响应特性并提高系统的鲁棒稳定性。
References)
[1]施国标,于蕾艳,林逸. 线控转向系统的全状态反馈控制策略[J]. 农业机械学报,2008,39(2):30-32,46.Shi Guobiao,Yu Leiyan,Lin Yi. Research on Full State Feedback Control Strategy of Steer-by-Wire[J].Transactions of the Chinese Society for Agricultural Machinery,2008,39(2):30-32,46.(in Chinese)
[2]杜峰,魏朗,赵建有. 基于状态反馈的四轮转向汽车最优控制[J]. 长安大学学报,2008,28(4):91-94.Du Feng,Wei Lang,Zhao Jianyou. Optimization Control of Four-Wheel Steering Vehicle Based on State Feedback[J]. Journal of Chang'an University,2008,28(4):91-94. (in Chinese)
[3]金耀,于德介,殷智宏. 主动悬架的一种基于状态反馈的单神经元多变量控制策略[J]. 振动与冲击,2008,27(8):12-15.Jin Yao,Yu Dejie,Yin Zhihong. Single Neuron Multivariable Control Strategy for Active Suspensions Based on State Feedback[J]. Journal of Vibration and Shock,2008,27(8):12-15. (in Chinese)
[4]鲍伟,张崇巍,肖本贤,等. 基于粒子群的状态反馈控制特征向量的配置[J]. 系统仿真学报,2009,21(22):7113-7117.Bao Wei,Zhang Chongwei,Xiao Benxian,et al. Eigenvector Assignment Based on Particle Swarm Optimization in State Feedback Control[J]. Journal of System Simulation,2009,21(22):7113-7117. (in Chinese)
[5]崔家骥. 现代控制系统设计理论的新发展(第2版)[M].北京:科学出版社:2007.Cui Jiaji. New Development of Modern Control System Design Theory(Second Edition)[M]. Beijing:Science Press,2007.(in Chinese)
[6]PETKOV P,CHRISTOV N,KONSTANTINOV M.Computational Algorithm for Pole Assignment of Linear Munltiinput Systems[J]. IEEE Transactions on Automatic Control (S0018-9286),1986,31(11):1044-1047.
[7]KAUTSKY J, NICHOLS N K,Van DOOREN P. Robust Pole Assignment in Linear State Feedback[J].International Journal of Control,1985,41(5):1129-1155.
[8]TUSI C C. A New Algorithm for the Design of Multi-Functional Observers[J]. IEEE Transactions on Automatic Control (S0018-9286),1985,30(1):89-93.
[9]DUAN G R. Solution to Matrix Equation AV+VF=BM and Their Application to Eigenstructure Assignment in Linear Systems[J]. IEEE Transactions on Automatic Control(S0018-9286),1993,38(2):276-280.
[10]MACIAN V,LUJAN J M,GUARDIOLA C,et al. DFTBased Controller for Fuel Injection Unevenness Correction in Turbocharged Diesel Engines[J]. IEEE Transactions on Control System Technology,2006,14(5):819-827.
[11]张凯,彭力,熊健,等. 基于状态反馈与重复控制的逆变器控制技术[J]. 中国电机工程学报,2006,26(10):56-62.Zhang Kai,Peng Li,Xiong Jian,et al. State-Feedbackwith-Integral Control Plus Repetitive Control for PWM Inverters[J]. Proceedings of the Chinese Society for Electrical Engineering,2006,26(10):56-62. (in Chinese)
[12]朱建栋. 带传输滞后的线性离散系统的状态反馈镇定[J].控制与决策,2008,23(6):651-654,664.Zhu Jiandong. State Feedback Stabilization for Linear Discrete Systems with Transmission Delays[J]. Control and Decision,2008,23(6):651-654,664. (in Chinese)
[13]何战斌,马保离. 离轴式拖车移动机器人的反馈镇定[J].控制理论与应用,2009,26(7):758-762.He Zhanbin,Ma Baoli. Feedback Stabilization of Tractor-Trailers with Off-Axle Hatching[J]. Control Theory &Applications,2009,26(7):758-762. (in Chinese)
[14]郑大钟.线性系统理论(第2版)[M]. 北京:清华大学出版社. 2002.Zheng Dazhong. Linear System Theory(Second Edition)[M].Beijing:Tsinghua University Press,2002. (in Chinese)
[15]吴昌悫,魏洪增. 矩阵理论与方法[M]. 北京:电子工业出版社,2006:167-176.Wu Changque,Wei Hongzeng. Theory and Methods of Matrixes[M]. Beijing:Publishing House of Electronics Industry,2006:167-176. (in Chinese)
[16]鲍伟. 视觉导航移动机器人路径跟踪控制策略的研究[D].合肥:合肥工业大学,2009:50-53.Bao Wei. Study on Control Strategy of Path Tracking for Vision-Based Navigation Mobile Robots[D]. Hefei:Heifei University of Technology,2009:50-53. (in Chinese)
[17]KAUTSKY J,NICHOLS N K,Van DOOREN P. Robust Pole Assignment in Linear State Feedback[J]. International J of Control,1985(41):1129-1155.
