增程式电动客车能量管理策略仿真研究
2013-10-29祝雅琦
祝雅琦,何 泳,周 露
(北京理工大学 新能源汽车北京实验室,北京 100081 )
1 动力系统结构及仿真模型
本文研究的增程式电动车是一种串联式混合动力车辆,其动力驱动系统结构如图1所示,图中虚线框内为发动机-发电机组。本文设计了两种结构:一种是由高速柴油机、永磁同步发电机和三相不可控整流桥组成[2];另一种是在前者的基础上增加了DC-DC变换器(Boost电路)。动力电池组采用锰酸锂电池,驱动电机采用永磁同步电机,变速器为两挡行星齿轮变速器。
在Matlab/Simulink环境中建立两种发动机结构下的増程式动力系统仿真模型,如图2、图3所示。整车参数见表1。

表1 整车参数
2 发动机 - 发电机组控制策略
两种发动机-发电机组结构下的增程式电动车都采用电池组恒SOC模糊控制策略。增程式电动车以纯电动行驶为主,主要动力来自动力电池组,需要满足一定纯电动续驶里程要求,使电池组SOC在较低水平时APU系统才投入工作。APU系统控制的目标是在动力电池组SOC恒定在一个合理范围前提下,降低发动机的燃油消耗率。本文选择将电池组SOC维持在0.3 附近。
2.1 模糊控制器结构
本文采用模糊控制器(图4)对电池组SOC进行限定,输入变量为SOC和SOC的增量△SOC,输出为电池组电流期望系数COEF。因为SOC 在某种程度上也间接反映了直流母线电压值,而SOC的变化率表征了流过电池电流趋势,所以根据SOC和SOC变化率,通过模糊控制,确定APU系统期望电流,控制电池组SOC维持在一个合理范围内。
被控对象是发动机-发电机组,负载IL作为扰动量引入。首先根据模糊控制器输出的电池组期望电流得出发电机期望电流Igexp(式1),再根据直流母线电压得到发动机-发电机组期望功率Pgexp(式2),最后通过电池组初始SOC和发动机期望功率Pgexp确定目标转速n_goal。系统通过控制发动机转速来调节发电机输出电流,结合负载需求间接调节了电池组输出电流[3]。
2.2 模糊控制器隶属度函数及控制规则
设计一个好的模糊控制器除了要有好的模糊控制规则外,合理选择输入变量的量化因子和输出变量的比例因子是非常重要的[4]。
目前有很多高校仍然使用着以前的不同级别的原则,在一所学校内有着多个不同的行政级别,而且还有着很多部门,划分得过于细致,同时学校内的超市、学生公寓和医院等机构都被纳入行政机构中,使得机构职能重叠严重,权责划分不明,而且人员常年都处于只增不减的状态,使得机构的管理难以达到预期效果,而且在决策力和执行力时,由于机构和人员过多而严重分散,导致办事效率差。一般很简单的小事都会牵扯到很多机构部门,而各部门间又权责不明,合作不够协调,导致出现极大的物力和人力资源的浪费。
模糊控制器的输入变量为SOC及其增量△SOC,输出为电池组电流期望系数COEF。SOC划分为:NB、NS、Z、PS、PB 5个模糊状态,其论域为[0.25,0.275,0.3,0.325,0.35],如图5所示,量化因子Kc=1;△SOC划分为N、Z、P 3个模糊状态,其论域定义为[ -1,0,1],如图6所示,量化因子Ke=1 000;COEF被划分为BC、SC、Z、SD、BD 5个模糊状态,其论域为[ -1,-0.5,0,0.5,1],如图7所示,比例因子Ku=400。3个变量都采用三角隶属度函数。

表2 模糊控制规则表
根据试验总结得出控制规律,见表2。采用Mamdani推理方法,用if-then语句形式表示。
如果 SOC和△SOC,那么COEF模糊量清晰化过程采用重心法,一般认为重心法获得的结果是相当理想的,稳态性好,在可以保证实时性的情况下被广泛使用。
2.3 转速控制策略
发动机转速控制采用多点转速切换控制方式,即将发动机的工作转速划分若干个不同的转速,根据模糊控制器得到的发动机-发电机组期望输出功率Pgexp在不同的转速之间切换,在较低功率需求时使发动机工作在低转速,而高功率需求时就将转速提至高转速工作区。发动机转速多点控制可以更好地满足发动机动态功率跟踪的控制目标[5]。
图8所示为发动机-发电机组多点转速切换工作模式的原理图,系统的功率需求分为3个负荷区,在每一个负荷区内发动机的转速是固定的。
(1)小负荷区I:负荷范围0~15 kW,发动机转速n1。
(2)中负荷区II:负荷范围10~45 kW,发动机转速n2。
(3)大负荷区III:负荷范围35~75 kW,发动机转速n3。
根据所选定的负荷区,发动机转速的选择必须能够满足系统在相应负荷区内的功率需求。不加DC-DC变换器的发动机-发电机组受电池组电压的限制,必须工作在高转速工况下,转速根据发动机-发电机组的工作范围和发动机-发电机组的电压电流特性决定。加DC-DC变换器的发动机转速不受电池组电压的限制,可以按最佳燃油消耗曲线来选取,即图9中的黑色虚线。
两种结构下的发动机多点转速切换区域最终设计结果见表3。

表3 多点转速切换区域最终设计结果
发动机目标转速控制流程如图10所示。目标转速上升、下降的步长在仿真周期0.001 s下为1 r/min。
3 DC-DC变换器的控制策略
DC-DC变换器(Boost电路)是通过控制IGBT的PWM波占空比来调节输出电压,在仿真模型中,PWM波的占空比由永磁同步发电机-整流桥直流侧电压、功率方程和Boost电路的输出输入电压方程,即方程组(3)决定。
式中,Ug、Ig分别为整流桥输出端电压、电流;Pg为整流桥输出功率;n为发电机转速;Ub为电池组端电压,即DC-DC变换器输出端电压Udc;α为控制IGBT开断的PWM波占空比;Ke为发电机的等效电动势系数;Kx为发电机等效阻抗系数。本项目中使用的DC-DC变换器的平均效率为91%。
由上述方程组求解得到占空比
计算占空比的仿真模型如图11所示。将占空比信号与三角波比较就得到控制IGBT开关的PWM波,如图12所示。
4 仿真结果
目前,欧洲汽车排放标准规定的行驶工况为市区与城郊结合的ECE+EUDC(ExtraUrban Driving Cycle)工况[6],本文研究的增程式电动客车为校车,行驶于市区与城郊之间,所以本文采用的工况是在ECE+EUDC的基础上修改而来,修改地方有两处。
(1)为了验证电池组恒SOC模糊控制策略能将SOC控制在0.3附近,所以将负载大的EUDC工况放在4个ECE中间,为2ECE +1 EUDC +2ECE。
(2)增程式校车的乘客为学生,为了安全起见,将车速限制在80 km/h以下。
行驶工况如图13所示,两种APU结构下车速都能很好地跟随,工况里程为10.3 km。
不加DC-DC变换器和加DC-DC变换器的SOC曲线对比如图14所示,两者都能将SOC控制在0.3附近,即使大负荷让SOC下降,之后也能调节到0.3附近,SOC末值也约等于0.3,整个工况SOC都处于0.25~0.35之间,证明设计的恒SOC模糊控制器是有效的。加DC-DC变换器的SOC更靠近0.3,说明加DC-DC变换器的模糊控制器效果更好。
不加DC-DC变换器的发动机工作点如图15中的散点图所示,发动机转速工作在2 500 r/min、2 600 r/min、2 750 r/min 3个点;加DC-DC变换器的发动机工作点如图16中的散点图所示,发动机转速工作在1 000 r/min、2 000 r/min、2 600 r/min 3个点。对比两图可看出在低负荷区,不加DC-DC变换器的燃油消耗率明显比加DC-DC变换器的高,中负荷区和高负荷区的燃油消耗率区别不明显,加DC-DC变换器的发动机工作点比较接近最佳燃油消耗曲线。由此可知,增加DC-DC变换器的发动机明显比不加DC-DC变换器的省油。
图17为不加DC-DC变换器的整流桥输出电流和电池组电流曲线图,图18为加DC-DC变换器的整流桥输出电流和电池组电流曲线图,两者的发动机-发电机组和电池的功率分配区别不大,都随车辆负载变化。
由表4中的百公里油耗计算出:加DC-DC变换器比不加DC-DC变换器省油8%。
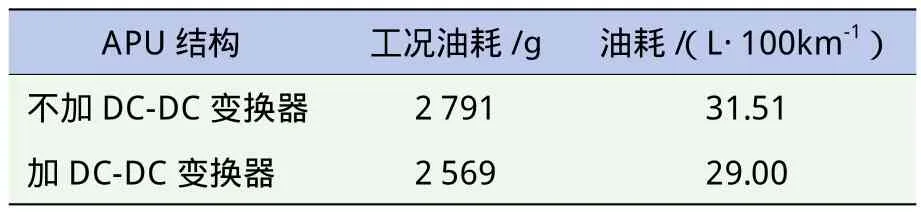
表4 发动机油耗
5 结论
在具有相同电池SOC初值与末值条件下,发动机-发电机组加DC-DC变换器比不加DC-DC变换器燃油消耗少。其次,不加DC-DC变换器的发动机一直工作在高转速区,噪声大,加DC-DC变换器的发动机在低转速区和高转速区之间切换,噪声较小。所以,对于增程式电动校车而言,整流后直流升压的发动机-发电机组结构是更为有效合理的方案。
References)
[1]EHSANI M,Gao Yimin,EMADI A.现代电动汽车、混合动力电动汽车和燃料电池车——基本原理、理论和设计(第2版)[M].北京:机械工业出版社,2010.EHSANI M,Gao Yimin,EMADI A. Modern Electric,Hybrid Electric,and Fuel Cell Vehicles:Fundamentals,Theory,and Design(2nd ed.)[M]. Beijing:China Machine Press,2010.(in Chinese)
[2]何彬,程夕明,曹桂军,等. 串联混合动力辅助动力单元动态控制研究[J]. 汽车工程,2006,28(1):12-16.He Bin,Cheng Ximing,Cao Guijun,et al. Dynamic Control for Auxiliary Power Unit of Series Hybrid Electric Vehicles[J]. Automotive Engineering,2006,28(1):12-16. (in Chinese)
[3]李军求.电传动车辆混合动力系统能量分配与管理[D].北京:北京理工大学,2005.Li Junqiu. Energy Distribution and Management of Hybrid Power System of Electric Drive Vehicle[D]. Beijing:Beijing Institute of Technology,2005. (in Chinese)
[4]李士勇.模糊控制-神经控制和智能控制论[M].哈尔滨:哈尔滨工业大学出版社,1996.Li Shiyong. Fuzzy-Neutral Control and Intelligent Control Theory[M]. Harbin:Harbin Institute of Technology Press,1996. (in Chinese)
[5]曹磊.电驱动履带车辆纯电传动模式下的动力驱动分配与控制[D].北京:北京理工大学,2009.Cao Lei. Power Matching and Control of Power-Train System of Tracked Electric Driving Vehicle in Pure Electric Transmission Mode [D]. Beijing:Beijing Institute of Technology,2009. (in Chinese)
[6]朱俊虎. 城市公交车行驶工况的构建[D]. 合肥:合肥工业大学,2011.Zhu Junhu. The City Bus Driving Cycle Construction [D].Hefei:Hefei Institute of Technology,2011. (in Chinese)
