一种光幕测速系统的设计与实现
2013-10-28穆天红
穆天红,杨 云,冯 聪
一种光幕测速系统的设计与实现
*穆天红1,杨 云1,冯 聪2
(1. 陕西科技大学电气与信息工程学院,陕西,西安 710021; 2. 南京理工大学计算机科学与工程学院,江苏,南京 210094)
基于光电转换原理,实现了一种以LM339为主要芯片的光幕测速系统,通过对光幕测速系统软硬件的重新设计,解决了原有光幕测速系统光幕覆盖不全面和光线粗细不均匀的问题,提高了整个系统的准度与精度,完成了光幕靶与计时系统的一体化。通过对光通量信号的分析与计算,实现了对不同速率运动物体的精确测速。经过运行测试,该系统稳定可靠,各项指标均已达到设计要求。
光电转换;LM339;光幕测速系统;光通量信号
0 引言
随着科学技术的进步,测速系统越来越多的被应用于社会生活的各个方面,而其中又以军事领域对精确测速的需求最为关键和重要。子弹、炮弹等弹丸飞行速度的精确测量对武器装备的设计、生产以及装备部队都有至关重要的作用。
根据与测时仪配合的区截装置不同,测量弹丸飞行速度的系统主要分为接触型测量系统和非接触型测量系统[1]。接触型测量系统可以分为铜丝网靶、箔靶和铜丝惯性靶等,其主要工作原理是通过拦截弹丸弹道获取弹丸的过靶时间,所以其对小口径低速度的弹丸弹道影响特别大,同时也会使弹丸的着靶落点出现很大偏差[2]。
由于接触型测量系统对弹道运动产生影响,测量准确度低,已逐渐被非接触式测量系统所取代[2]。非接触测量系统有线圈靶、天幕靶、光幕靶、高速摄影等,线圈靶利用弹丸切割磁感应线使磁通量发生变化而产生电信号[3-4],从而记录弹丸触靶时间,但是这种方法使用空间狭小只能近距离测量,而且不适用于非导磁性弹头。天幕靶[5]普遍采用自然光,光谱脉冲范围比较大,如果弹丸飞行高度比较高,光电传感器所测到的特征信号不明显,而且其在阴雨天也不便于使用,再加上若有鸟类飞过,其抗干扰能力比较差。高速摄影法有体积庞大、操作繁琐、易震动等问题,同时后续图像处理复杂[6]。而光幕靶则能避免以上缺点。
光幕靶是一种基于光电转换原理的非接触型测量系统,以发射光源形成的光幕为靶面,弹丸穿过靶面时会遮住部分光幕从而引起光电探测器接收到的光通量发生变化,光电探测器引起的光电流变化经过光电转换电路产生脉冲信号,经过电路处理,将光电探测器产生的脉冲信号作为测时仪的触发信号。在弹丸先后穿过两靶面后,测时仪分别记录这两个时刻,以此计算出弹丸穿过两靶面间弹道的时间,即可计算出弹丸穿过两靶面的平均速度。
1 国内外研究现状
奥地利HPI 公司成功研制了B571 型光幕靶,靶面大小为 1000 mm×1000 mm,可以测试 4~20 mm 口径、50~2000 m/s 速度范围的弹丸速度,测量精度小于 0.1%[6]。奥地利AVL公司的B570型光幕靶,由四道光幕靶组成,不但可以计算弹丸速度,也可以计算出弹丸的着靶坐标。该公司的401型精度靶,设计原理如编码式光电立靶系统,在横纵坐标上分别有200个单位光电靶,每个单位光电靶由一根光电纤维和一个光电二极管组成,每跟纤维对应一个光电管。当有弹丸穿过光电靶时,会遮断几根光束,通过遮断的光束计算出的中心位置就是弹丸的着靶坐标[7]。
由于国外光幕靶测试系统价格昂贵以及技术封锁等原因,国内的多家大学和科研机构推出了多款光幕靶。西安工业大学光电测试技术研究所研制的XGK-2002型光幕靶,该靶是一种采用PIN型光电二极管阵列作为发射端光源设计的大靶面光幕靶,其靶面大小为1000 mm×1000 mm,能够测量低于50 mm口径的各种弹丸的飞行速度[8]。由于其使用发光二级管作为光源,使其发射端电路设计复杂,光幕的准直度和发射距离有待进一步提高。
中北大学TJ-1型光幕靶,靶面大小为200 mm×250 mm,由于其在测速精度和稳定性的优异表现,被兵器工业作为测速基准系统[9]。由于其靶面过小,不适合大口径炮口的测量要求。
2 系统总体设计
整个系统由软硬件两个部分组成,硬件系统有两道平行光幕[10],测量好两道光幕之间的距离s,一旦有炮弹穿过第一道光幕光电转换电路产生电压信号,记下触发时间t1,同样第二道光幕的触发时间为t2,炮弹速度v=s/(t2-t1)。整体结构如图1所示:
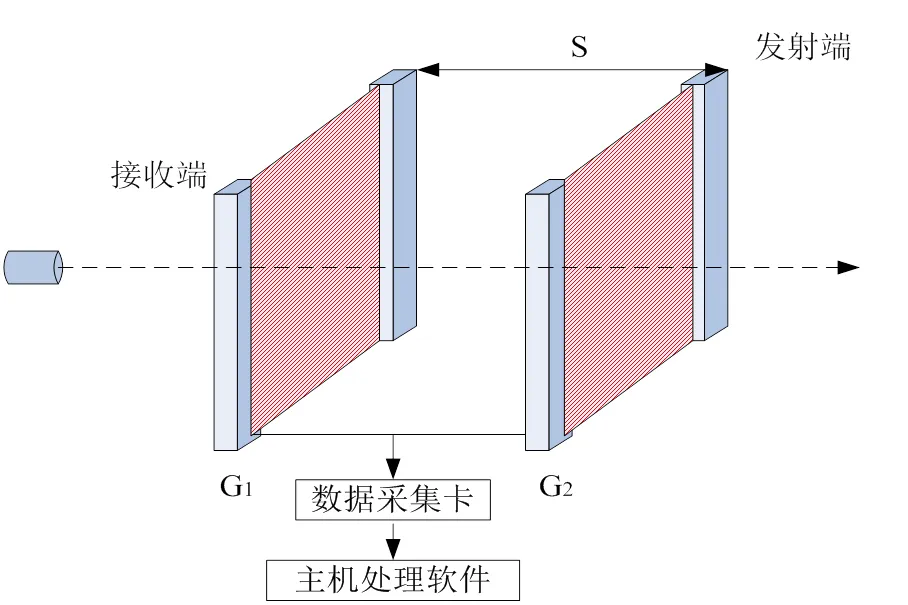
图 1 光幕测速系统整体结构
3 软硬件系统设计
整个系统由软件硬件两部分组成,硬件部分主要分为光电信号转换模块和光电信号处理模块。软件部分也分为PCI数据采集卡和主机处理软件两个部分。
3.1 光电信号转换模块设计
光电信号产生模块由发射端和接收端构成,在传统的光幕靶设计中,一般使用发光二极管(LED)作为光幕的光源,但是发光二级管由于其发光亮度弱、聚光强度小、散射严重并不适合作为大靶面光幕靶的光源。同时由于大靶面光幕靶一般要使用上百个的发光二极管,操作起来比较复杂,所以在这里使用输出波长650 nm、管芯功率100 mv的一字型激光器作为光源,其具有线条清晰、明亮、均匀、准直度高、发射距离远的特点。
硬件系统由发射端和接收端构成,发射端使用三个大功率一字型激光器配合菲涅尔镜片产生粗细均匀的平行光。这是因为若只使用一字型激光器所发出的光束为扇形,同时接收端的光强度会从中间到两端逐渐减弱,配合菲涅尔镜片之后产生平行光束,各光束之间不存在盲区,同时光幕各点光强相同,从而当有弹丸穿过时,产生的跳变电压也相同。由于在发射端使用菲涅尔镜会使光线横向发散从而变粗,在接收端使用平凸镜重新聚集光线。结构如图2所示:
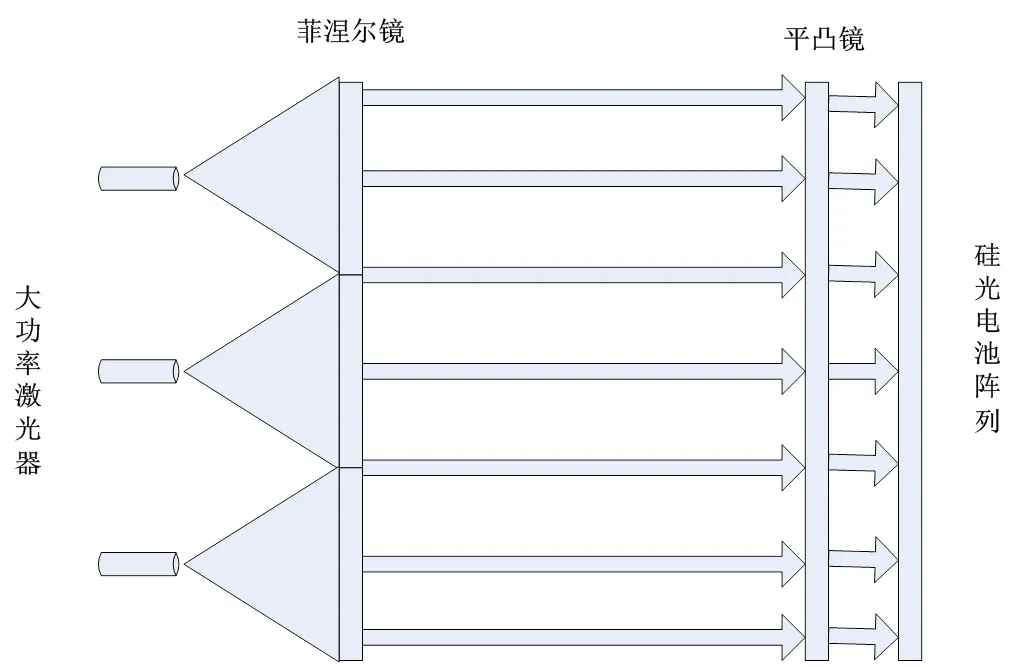
图2 光电信号生成示意图
在接收端使用高灵敏度的进口硅光电池阵列,一片硅光电池阵列有25.4 mm,有16个独立单元组成,每个单元约1.5 mm,这样我们可以保证,只要穿过光幕的弹丸直径不小于1.5 mm我们都能精确的测量出弹丸的速度。电压信号产生电路如图3所示:
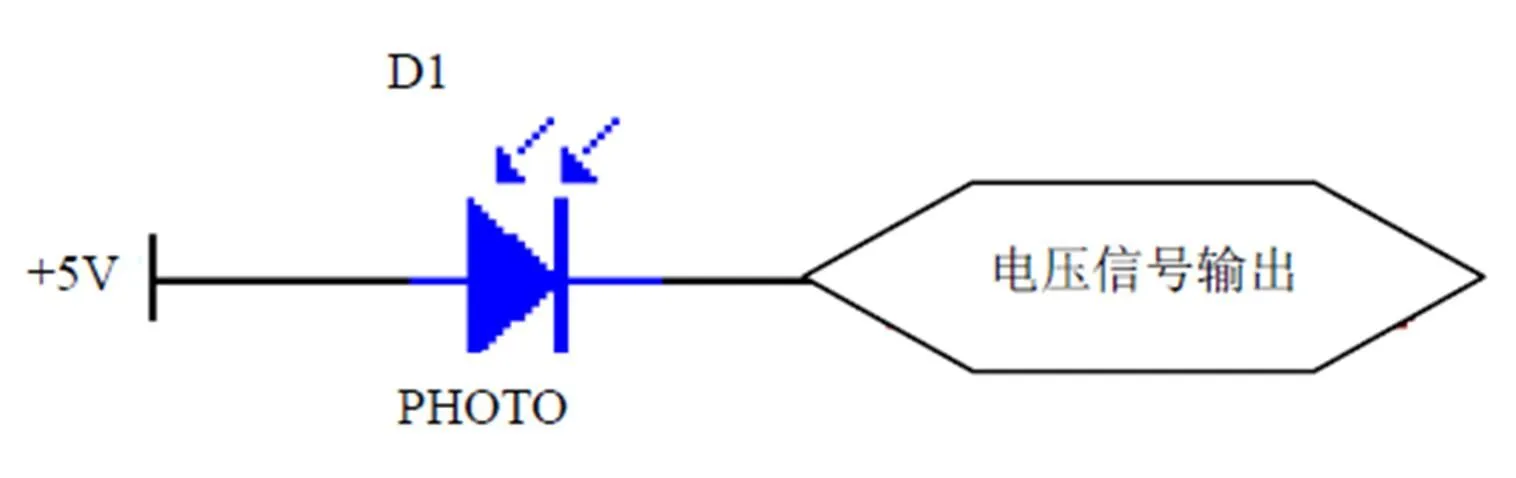
图3 光电信号产生电路
基于本光电信号转换模块的设计,相对于其他光幕测速系统,本系统具有光幕覆盖范围大、无盲区、反应灵敏的特点。
3.2 光电信号处理模块设计
在光电信号处理模块我们使用LM339作为电路的主要芯片,LM339具有失调电压小、共模范围大和对比较信号源的内阻限制很宽的优点,其由四个独立的电压比较器组成,每个比较器有两个输入端和一个输出端。两个输入端一个称为同相输入端,用“+”表示,另一个称为反相输入端,用“-”表示。当比较同相输入端和反向输入端的电压时,任意一个输入端加一个固定电压做参考电压(也称为门限电平,它可选择LM339N输入共模范围的任何一点),另一端加一个待比较的信号电压。当“+”端电压高于“-”端时,输出管截止,相当于输出端开路。当“-”端电压高于“+”端时,输出管饱和,相当于输出端接低电位。两个输入端电压差别大于10 mV就能确保输出能从一种状态可靠地转换到另一种状态,因此,把LM339N用在弱信号检测等场合是比较理想的。
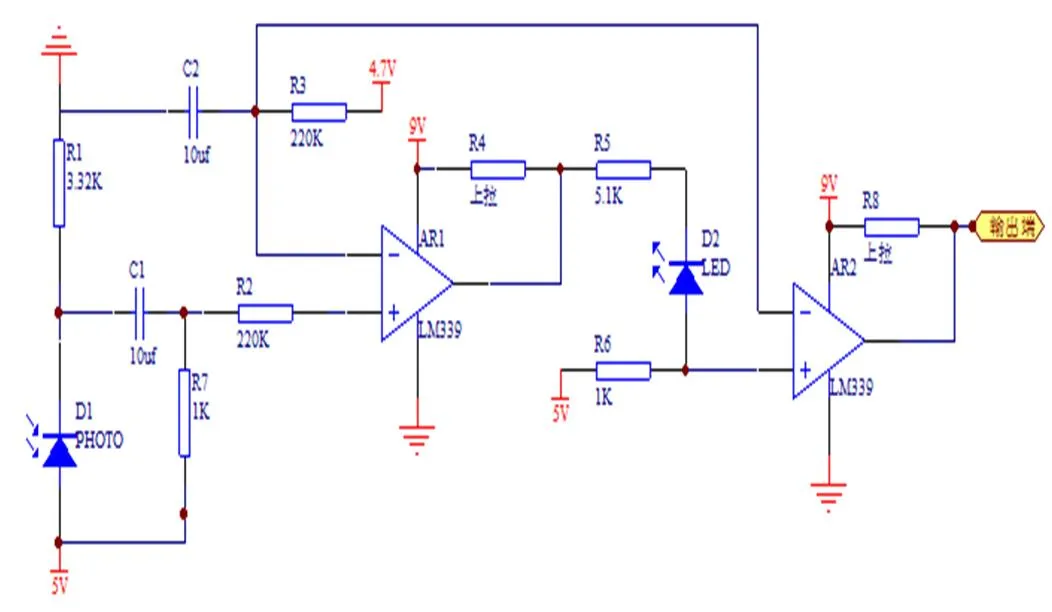
图4 接收端硬件电路简图
电路图核心部分大体如上图所示,一旦硅光电池阵列D1的光通量发生变化,会使电容C1产生电荷,从而拉低AR1正极电压,正极电压原本是5 V,负极为4.7 V,一旦正极电压低于4.7 V,LM339就会输出一个低电平信号同时点亮D2,这样就能够判断炮弹从哪一个位置穿过。同样将很多路独立的光电转换电路聚集到一起,一旦有一路输出低电平信号,会拉低AR2的正极电压,再与参考电压4.7 V进行比较,从而最后输出一个低电平信号到PCI采集卡。
3.3 PCI数据采集卡
PCI采集卡为成都中科动态仪器有限公司开发的PCI4712双通道信号采集卡,卡上集成了2片高速50Msps 12bit A/D转换器,和2个独立的高速精密运算放大及精密衰减滤波网络组成程控增益通道,实现大动态信号采集。每个通道的独立控制和无手工调节器件使其具有高测量精度和相位一致性,具有较高的工作可靠性和稳定性。
A/D转换的最高采样频率为50 Msps,采用先进的DDS频率合成器实现100 sps-50 Msps的任意频率合成,从而可以设置任意细分的采样频率,细分频率的指标用于特殊场合的信号采集功能。
两个通道可独立地用软件控制增益,从±100 mV~ ±20 V按1、2、5分为8档。每通道最大采样深度可达到16Msa。通过特殊设计的环形缓冲器实现预触发存储功能,特别适合工程上的单次过程信号记录。预触发和触发后的延时可以达到最大采集长度。
使用PCI数据采集卡采集触发信号相对于其他数据采集方式以及基于单片机的光幕测速系统有以下优点。首先,其采样精度高,由于本系统的采样频率高达50 MHz,所以其灵敏度相当高达到20 ns,单片机由于其自身的晶振频率和指令周期的限制只能达到微妙级,与本系统差距很大。其次,每通道最大4M字节的存储深度,所以本系统能够清晰的展示每个通道的电压信号波形。再者,由于采样频率和采样长度可调,所以本系统适应测速范围广。
3.4 软件系统设计
数据采集卡采样完成之后,就要对采集到的数据进行处理计算出每一个光幕靶的触发时间。我们使用PackToDouble(int nChnNum,double * pData, int SamIntV, long SamStart, long SamLen)函数来提取各通道的电压值序列,参数nChnNum为通道,参数pData为该通道电压值序列的指针,参数SamIntV为抽样比,参数SamStart为采样起始时间,参数SamLen为采样长度。
提取完电压值序列之后,根据不同的触发模式对电压值序列进行处理,这里主要分为上升沿触发和下降沿触发。然后遍历每个通道的电压值序列,当我们选择上升沿触发时,根据设定的触发电压遍历电压值序列,当当前电平值大于触发电平我们就认为这个点为触发点,同时记录该点的位置。图5为触发坐标提取流程图:
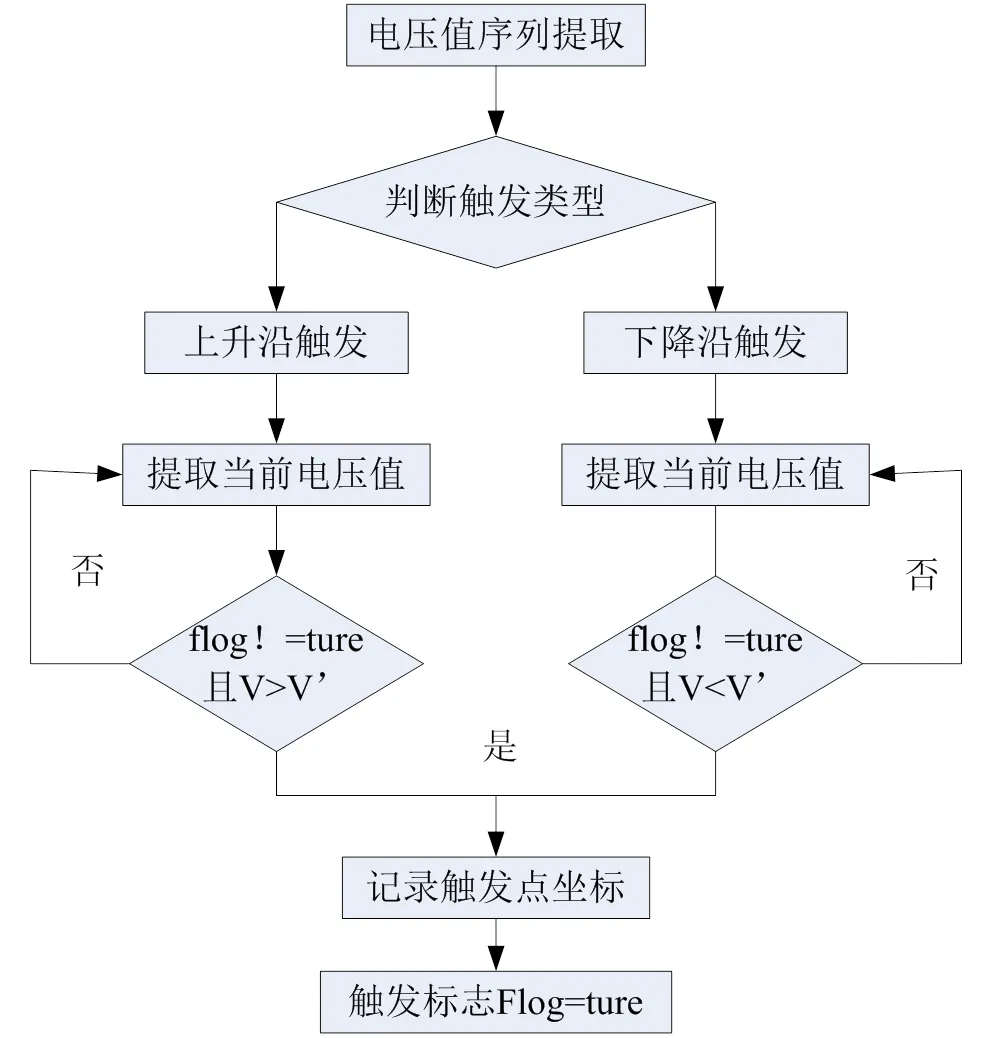
图5 触发坐标提取流程图
本系统不但针对单个弹丸测速,也针对双弹丸测速,触发坐标提取流程如上图一样,单双弹丸信号触发波形如图6所示:

4 系统实现
系统硬件参数:
(1) 靶面大小:1000mm×1000mm
(2) 弹丸直径:1.5mm~50mm
(3) 测速范围:10~3000m/s
(4) 测速精度:<0.18%
运行程序,会出现测速系统的软件界面,首先选择测速范围并设定靶间距离,选择采样率和采样长度,在选择采样率和采样长度之前你必须先估算你所测运动物体的大致速度,只有这样才能在界面上呈现完美的波形。在这里将采样延迟设为0,触发方式为下降沿内触发,采样量程为10 V。触发电平的选择需要进行实际的测量,在本系统中未触发时,信号线的电压为6.7 V左右,一旦触发,电压会降到4 V以下,所以我们设置触发电平为4 V。
参数设置好了以后点击单次采集按键,等待触发。这时,采集结束灯为红色,一旦触发结束,采集结束灯会变为灰色,证明采集已经结束,右侧界面会显示当前测量结果和通道1、通道2触发时间,对比左侧界面的触发波形,会有更准确的认识。采集结束可以查看更加详细的测量报告和多次采集的历史记录。图7为软件界面:

图 7 软件界面图
除此之外,软件设计上还添加了单靶测速功能,首先设定炮弹长度,计算单靶上下降沿波形所持续的时间,通过公式V=L/△T也可以计算出炮弹的瞬时速度。所以此种方式可以作为双靶测速方式的补充。
5 结束语
通过分析当前光幕靶的缺陷以及系统使用多样化的需求,设计和实现了一种以LM339为主要芯片的光幕测速系统。该系统在硬件上解决了光幕覆盖不全面和光电转换准度精度不高的问题,软件上通过使用PCI采集卡设计了两种不同的测速模式互相补充,同时通过界面的设计让用户更直观的了解被测物体的运动过程。整个系统便于安装调试,可以满足多样化的测速要求。
[1] 唐波,王选择,晏红.基于光幕靶的便携式弹丸速度测量系统[J].三峡大学学报:自然科学版,2004,26(6): 533-536.
[2] 王小飞. 基于SOPC的测速雷达多普勒信号处理系统设计[D].镇江:江苏大学,2011.
[3] Hawke R S, Susoeff A R. Greenwood D W Design Considerations for a Passive Magnetic Induction Signal Generator for Sensing Hypervelocity Projectile Passage[J]. IEEE Transactions on Magnetic,1995,31: 725-728.
[4] 刘群华,施浣芳,阎秉先,等.红外光幕靶测速系统和精度分析[J].光子学报,2004,33(11):1409-1411.
[5] 张鹏,刘扬帆.一种天幕靶测速系统的电路设计[J]. PLC&FA,2011,7:100-106.
[6] 王壮.主动式双光幕精密测速系统设计[D].天津:天津大学,2011.
[7] 张林.CCD光靶交汇测量技术及应用研究[D].南京:南京理工大学,2008.
[8] 田会.六幕光幕靶测试技术研究[D].西安:西安工业大学,2007.
[9] 杨昭.弹载测速技术研究[D].太原:中北大学,2007.
[10] 荣立,倪晋平,杨敏,等.双缝光幕靶设计[J].应用光学,2007,28(4):392-396.
A design and implementation of velocity measuring system based on light screen
*MU Tian-hong1, YANG Yun1, FENG Cong2
(1. School of Electrical and Information Engineering, Shaanxi University of Science & Technology, Xi’an, Shanxi 710021, China; 2. School of Computer Science and Technology,Nanjing University of Science and Technology,Nanjing, Jiangxu 210094, China)
Based on the optoelectronic conversion principle, we implement a velocity measuring system based on light screen, which adopts LM339 as the main chip, re-design of the velocity measuring system based on hardware and software, solves the problem of the original system light screens’ coverage is not comprehensive and light uneven thickness. It also improves accuracy and precision of the whole system, completes the integration of the screen target and timing system. Based on the analysis and calculation of the light flux signal, the system implements the precisely measurement of different speed of moving object. After more than a year of practical testing, the system is stable and reliable, which all the indicators are to meet the design requirements.
optoelectronic conversion; LM339; velocity measuring system based on light screen; light flux signal
TJ306
A
10.3969/j.issn.1674-8085.2013.06.011
1674-8085(2013)06-0051-05
2012-12-03;
2013-10-18
陕西省教育厅专项科研计划项目(2010JK419)
*穆天红(1988-),男,青海海东人,硕士生,主要从事嵌入式开发,网络安全,并行计算研究(E-mail:tianhongmu@163.com);
杨 云(1965-),女,辽宁大连人,教授,博士,硕士生导师,主要从事计算机图像处理,数据挖掘研究(E-mail:yangyun11@163.com);
冯 聪(1986-),男,江苏徐州人,硕士,主要从事嵌入式开发应用研究(E-mail:fengcong1986@163.com).
