LH11-1半潜式平台的船体-系泊系统测量
2013-10-13武文华时忠民岳前进
屈 衍,杜 宇,武文华,时忠民,岳前进
(1.中海油研究总院,北京 100027;2.大连理工大学工业装备结构分析国家重点实验室,辽宁 大连116023)
浮式平台现场监测可以为结构在海洋环境作用下的响应提供重要的评估与校核依据,也是提高结构安全运行水平、改进结构设计的重要手段[1-2]。在墨西哥湾以及亚太海域,很多深水浮式结构都安装了现场测量系统进行结构在飓风条件下的响应测量[3-4]。Igor Prislin[5-6]等在Oryx Neptune Spar上开展了现场测量,在测量数据基础上,对设计中采用的TDSIM软件时域分析结果进行了校核。在Horn Mountain SPAR上,现场测量系统也记录了平台在飓风过程中的运动数据,John Halkyard[7-8]等人介绍了测量结果与频域及时域分析结果的比较情况。Xu Qi[9],Steve Perryman[10]等对 Holstein Spar在 Rita、Ike 和 IVAN 飓风中的响应进行了分析。在TLP平台上,Per Tigen等[11]对北海Heidrun TLP上的测量结果进行了介绍,对数值分析结果进行了校核与比较。R N Perego,G Li等[12]比较了IVAN台风中Marlin TLP的运动响应与全耦合数值分析的结果。在Marco Polo TLP现场测量的现场监测中[13],平台装备了用于测量海洋环境、结构运动、张力腿和结构应变的测量装置,从2004年到2009年进行了连续的大规模测量。利用现场实测结果对该TLP的设计、室内试验结果进行了校核。上述实测结果介绍中,多数结论认为目前的分析方法对平台在飓风过程中的运动响应预测可以达到一定精度。但对某些极端情况分析,如SPAR的垂荡运动等,仍存在计算中难以准确分析的问题。其原因在于设计中水动力阻尼、附加质量等难以准确模拟,系泊系统、立管系统对结构的影响仍难以精确考虑。
为了更好的了解浮式结构在南海的使用情况,在LH11-1油田的“南海挑战号”半潜式平台上安装了现场监测系统,对平台的海洋环境、结构运动以及系泊系统响应进行了连续测量,获得了平台在几个台风过程中的响应数据。这里对平台上的现场测量工作以及监测结果进行了介绍,并与平台、系泊系统耦合运动分析结果进行对比分析。
1 LH11-1半潜式平台简介
LH11-1油田位于中国南海距离香港215 km处,水深约260~300 m,油田采用FPSO-半潜式平台-水下中央管汇的开发模式[14]。油气田开发模式如图1所示。
用于LH11-1油田的半潜式平台前身为West Stadrill钻井平台,是一艘Sedco 700型平台。平台1993年购入并在1995年完成改造,作为浮式生产平台在LH11-1海域使用(见图2)。南海挑战号平台是一艘双浮筒、八立柱结构,平台有横撑、斜撑作为结构加强构件。

图1 LH11-1油气田开发模式示意Fig.1 LH11-1 Oil Field development
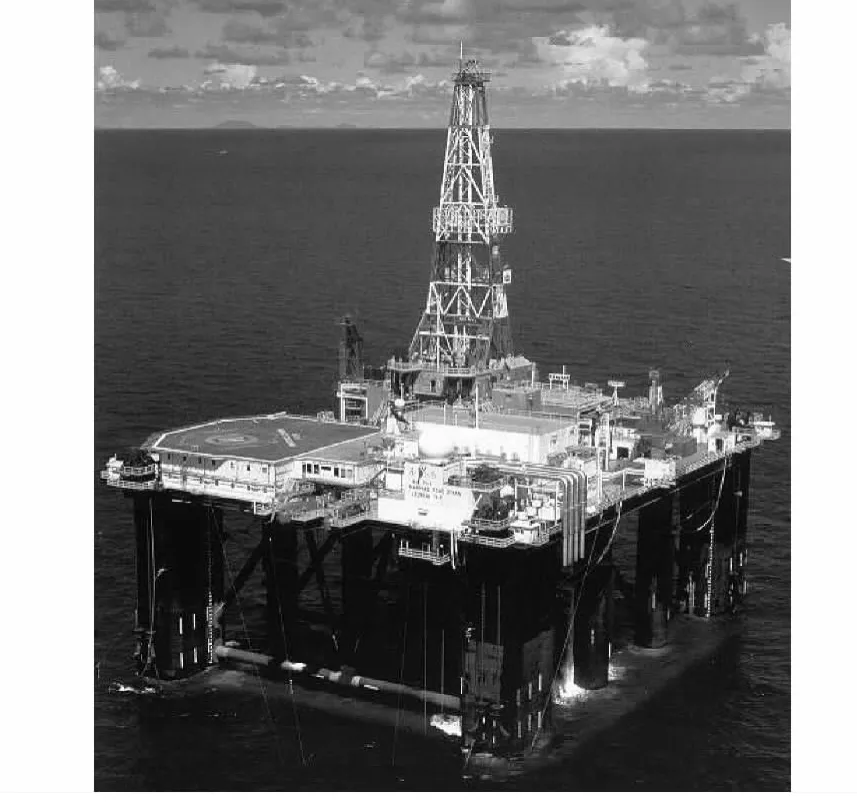
图2 LH11-1海域的南海挑战号半潜式平台Fig.2 Nanhai Tiaozhan semisubmersible at LH11-1 Oil Field
平台设计为11点系泊的系泊系统布置形式。该布置形式与平台所在海域的海洋环境相对应。针对平台所在位置台风的主要路径为NE到E方向,在平台的侧舷布置了6根系泊缆。系泊系统布置以及平台的方位如图3所示。单根系泊链布置为悬链线模式,采用锚链-锚缆-锚链的组成模式,具体系泊系统布置位置参数如表1所示。

表1 LH11-1平台系泊系统参数Tab.1 Mooring system component of LH11-1 SEMI
2 现场监测系统
布置在挑战号平台上的现场监测系统由风、浪、流环境监测系统、平台运动监测系统和系泊系统运动监测系统组成。其中风速测量装置有两套,分别为机械螺旋桨式和超声波式。两套装置互为备份使用。风速测量仪布置在平台顶层甲板设备间的屋顶高处。波浪测量分别采用了放置在水中的压力式测量装备和安装在平台甲板向下发射信号,测量甲板与海面之间距离的测波雷达进行测量。为了避免平台运动对测量结果的影响,雷达测量装置处加装了运动补偿装置。波浪测量装置如图4所示。
流速的测量通过ADCP进行。测量中采用了两套ADCP,由锚链悬挂于水深20m处分别向上和向下发送信号,测量表层流速以及全剖面流速。浮式平台的运动测量分别采用差分GPS和惯导系统。由于平台垂荡运动在一般海况下并不显著,差分GPS在测量平台垂荡运动中,精度可能达不到要求。因此为了补充垂荡测量结果,可以采用低频加速度传感器对垂荡运动加速度进行测量。本项目测量中,差分GPS,惯导系统安装在顶层甲板工具间屋顶,与风速传感器在同一高度。现场安装效果如图5所示。
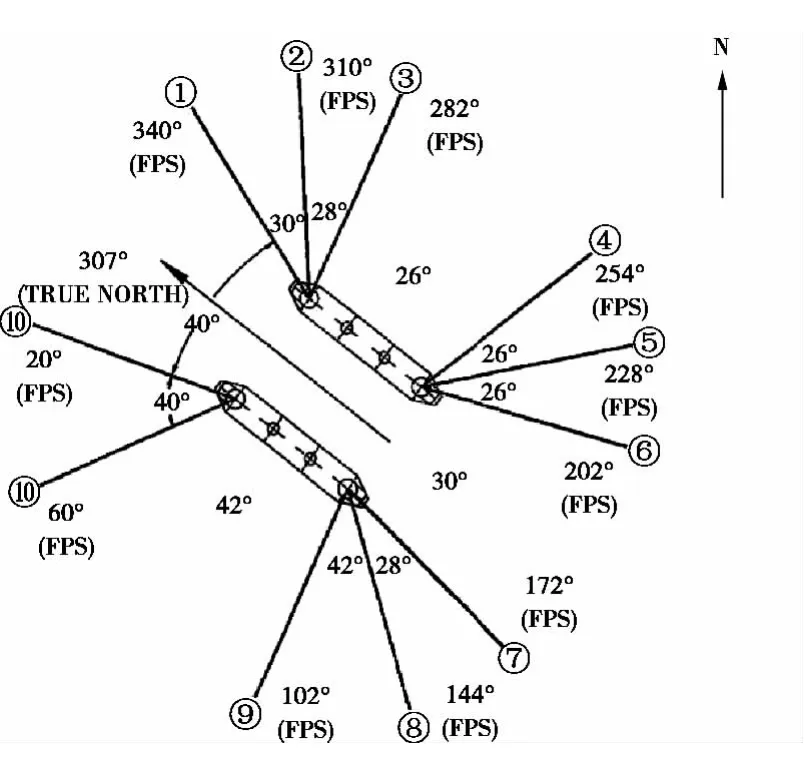
图3 LH11-1挑战号平台的系泊系统布置Fig.3 Mooring system arrangement of Nanhai Tiaozhan FPS

图4 安装与甲板位置的波浪测量雷达Fig.4 Downward looking wave height radar sensors and heave motion compensation device
在平台上有预先安装在止链器上的压力测量装置对锚链的张力进行间接测量。为了与张力数据相比较,设计了利用对锚链姿态直接测量,进而反算系泊力的测量方法。水下倾角传感器分别布置在水下20 m、50 m深度。传感器设计为自容式,自带能源和数据存储装置,运行结束由水下机器人(ROV)进行回收。图6分别展示了水下倾角,加速度传感器及水下安装情况。
为了观测波浪对平台的作用情况,在平台外舷安装了4组摄像头,分别记录波浪与平台各个立柱间作用情况以及甲板气隙。同时,摄像头记录的波浪在立柱位置的作用情况,也是对波高测量结果的补充验证。图7显示为台风过程中,摄像头记录的波浪与立柱作用情况的视频截图。

图5 安装在半潜式平台上的差分GPS,惯导系统和风速测量传感器Fig.5 DGPS,INS and wind sensor installed on the SEMI

图6 水下自容式倾角,加速度传感器及潜水员安装Fig.6 Subsea inclinometer and accelerometer sensor
3 洛坦台风中平台测量结果

图7 摄像头记录的台风过程中波浪作用在挑战号平台立柱上视频截图Fig.7 Pictures of wave acting on the FPS captured by the video cameras installed on the SEMI
现场测量期间南海经历了多次台风过程。其中多数台风路径不在LH11-1海域附近,因此平台并未经历极端海况。2011年7月28日左右路过平台周边海域的洛坦台风是其中一次典型的台风过程。这里选取该台风过程进行分析与比较。洛坦台风过程中风速测量系统测量的风速、风向结果如图8和图9所示。图中可见28日全天阵风风速从10 m/s增加到20 m/s水平。随着台风中心与平台位置的相对变化,风向从70°变化到120°左右。风向的变化在平台运动的连续数值分析中需要进行考虑。

图8 洛坦台风过程中风速变化情况Fig.8 Wind velocity of Nock-Ten typhoon measured on the Nanhai Tiaozhan FPS on July 28,2011
台风过程中,监测系统测量得到的波浪结果如图10所示。结果显示台风过程中,平台所在海域有效波高在3.0 m左右,在晚上增加到3.5 m左右。谱峰周期在7~9 s之间。浪向在100°左右方向。
由于平台不在洛坦台风的路径上,环境条件基本在一年一遇设计水平。平台运动相对较小。图11分别显示了监测系统在平台上测量得到的平台运动情况。在风、浪、流的作用下,平台横荡、纵荡位移约为3 m左右。平台运动方向在下午16点左右发生了改变,其原因为风向、浪向在下午发生了改变。
惯导系统对平台的转动情况实现了较好的测量。在台风过程中,平台的横摇,纵摇角度都在0.5°左右。在28日下午,由于风向,浪向的变化,纵摇增加到-1.5°,如图11(c)所示。

图10 洛坦台风过程中波浪要素Fig.10 Wave direction of Nock-Ten typhoon measured on the Nanhai Tiaozhan SEMI on July 28,2011

图11 洛坦台风过程中挑战号半潜式平台运动情况Fig.11 Heave of Nanhai Tiaozhan SEMI on July 28,2011
4 半潜平台运动的数值分析
利用现场测量数据,可以对平台在实际海洋环境中的运动响应进行评估,进而对数值分析结果,水池实验结果进行验证。由于分析工具的限制,目前对整个台风过程进行数值分析重现尚有较大难度,其主要原因是在实际台风过程中,风、波浪的作用方向和强度都是随着时间变化的,而目前的数学分析工具均不能直接模拟这种非稳态的物理过程。因此,数值分析只能对其中选取的片段进行模拟验证。选取了7月28日上午10:00到15:00之间的监测结果进行了平台/系泊系统耦合运动分析比对。该时间段环境参数如表2所示。

表2 洛坦台风中的海洋环境参数Tab.2 Environmental condition of Nock-Ten
平台的耦合运动分析通过船体立管系泊系统耦合分析软件Harp进行。该软件由美国TAMU大学开发,专门用于浮式结构及其系泊立管系统在风浪流作用下的时域耦合运动分析[16]。软件的水动力系数计算部分,由集成的WAMIT(Wave Analysis Mit)完成。WAMIT基于三维势流理论,利用内部集成的POTEN和FORCE子程序对速度势和水动力参数进行计算。浮体立柱自由表面边界条件为线性,采用自由表面格林函数法对波浪与平台间作用进行计算。船体运动时域部分由有限元模块Charm3D进行,分析中对系泊和浮体立柱的拖曳力、自由表面效应,锚链的几何非线性等非线性问题都进行了考虑。图12中显示为挑战号的计算模型,表3为平台模型参数,表4中列出了系泊系统计算的水动力系数。
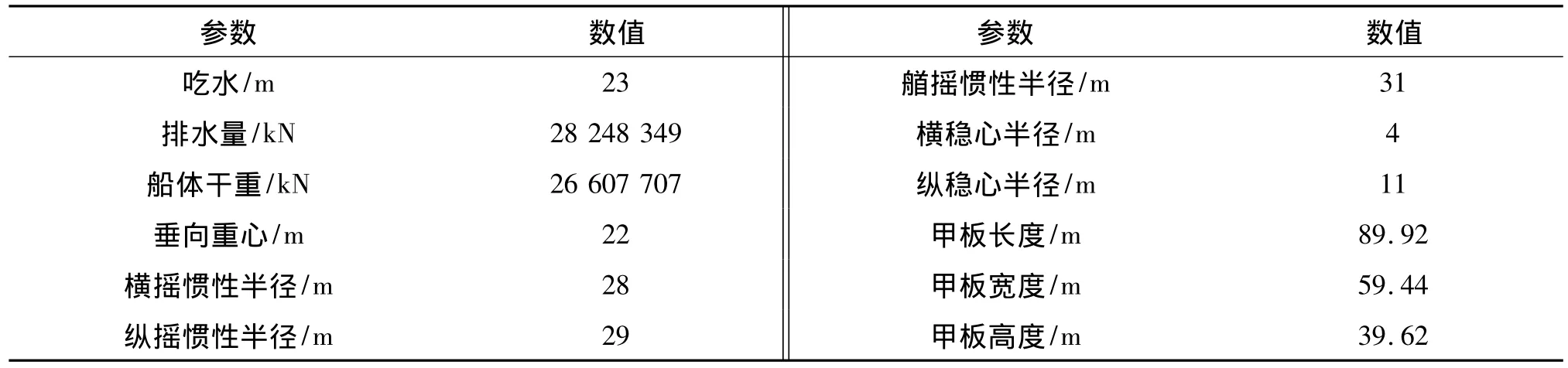
表3 挑战号平台模型参数Tab.3 FPS principal dimensions

表4 系泊系统计算参数Tab.4 Hydrodynamic coefficients for mooring line
图12 南海挑战号船体、系泊系统耦合运动分析模型Fig.12 Hull and mooring coupled analysis model of the Nanhai Tiaozhan SEMI
以表2中洛坦台风中的典型海洋环境参数为输入条件,这里进行了3小时的平台耦合运动分析。图13~16中显示了各个自由度运动时程功率谱的计算分析结果与测量结果比较情况。考虑到垂荡运动的测量精度无法满足需求,而首摇结果主要由风浪的方向改变造成,本文未对其结果进行比较。分析结果可以看出,耦合运动分析结果对低频,波频运动分量都有较好的反应。但是从能量分布来看,测量得到的波频运动分量大于计算得到的波频分量。
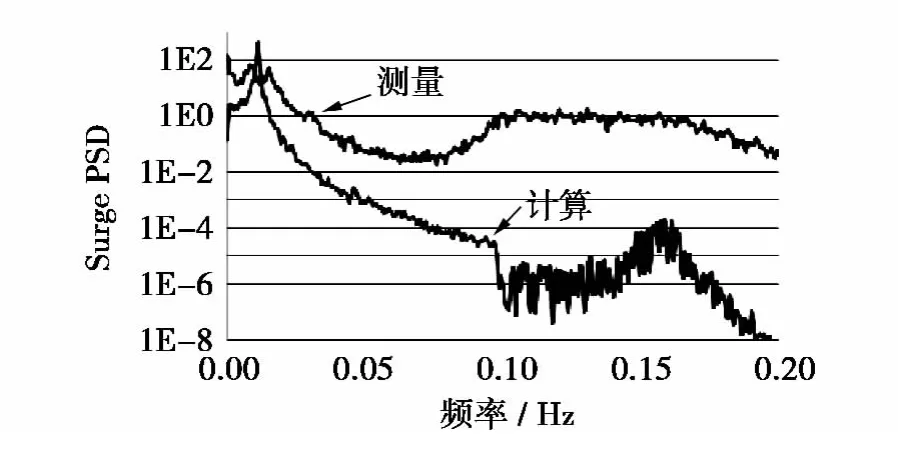
图13 平台横荡运动功率谱密度结果比较Fig.13 Power spectrum density of measured and calculated surge

图14 平台的纵荡运动功率谱密度结果比较Fig.14 Power spectrum density of calculated surge and sway
测量与计算得到的时域运动统计结果对比如图17所示。测量结果对比前,对高频信号进行了滤波处理。对比结果表明,平台的平动,转动计算分析结果与测量结果都有所不同。其计算量级在可接受范围之内。两者相差的主要原因应该在于计算模型与实际结构之间的差别,海洋环境作用模拟方法与实际作用过程仍有差别。

图15 平台横摇结果比较Fig.15 Power spectrum density of measured and calculated roll

图16 平台纵摇结果比较Fig.16 Power spectrum density of measured and calculated pitch

图17 平台运动统计结果对比Fig.17 Statistical results of measured and calculated
5 结语
1)在南海挑战号上安装的现场监测系统成功对台风期间的海洋环境,平台运动结果进行了连续测量。测量结果表明由于台风路径距离平台较远,2011年平台所在海域台风基本为一年一遇水平。平台运动相对较小。
2)采用耦合运动分析Harp软件,对平台在台风期间的运动情况进行了计算分析,计算结果与测量结果对比表明,测量结果的波频分量大于计算结果。统计结果表明计算的精度在可接受的范围内。
[1] Geyer J F,Perryman S R,Irani M B,et al.Floating systems integrity management of BP operated gom deepwater production facilities[C]//Offshore Technology Conference.2009:OTC 20137.
[2] Irani M B,Perryman S R,Geyer J F,et al.Marine monitoring of gulf of Mexico deepwater floating systems[C]//Offshore Technology Conference.2007:OTC 18626.
[3] Edwards R,Prislin I,Johnson T,et al.Review of 17 real-time,environment,response,and integrity monitoring systems on floating production platforms in the deep waters of the Gulf of Mexico[C]//Offshore Technology Conference.2005:OTC 176502.
[4] Craig Campman,Roderick Edwards,William Bud Hennessy.Review of floating production platform real-time integrity monitoring system worldwide[C]//Rio Oil& Gas Expo and Conference 2010 Proceedings.2010:IBP3407_10.
[5] Igor Prislin,John Halkyard,DeBord Jr,et al.Full-scale measurements of the oryx neptune production spar platform performance[C]//Offshore Technology Conference.1999:OTC 10952.
[6] Prislin I,Gupta H,Steen A,et al.Analytical prediction of motions vs.full scale measurements for oryx spar neptune[C]//International Conference on Offshore Mechanics and Arctic Engineering.2000.
[7] Halkyard J,Liagre P,Tahar A.Full scale data comparison for the horn mountain spar[C]//International Conference on Offshore Mechanics and Arctic Engineering.2004:OMAE 2004-51629.
[8] Tahar A,Halkyard J,Irani M.Comparison of time and frequency domain analysis with full scale data for the horn mountain spar during hurricane isidore[C]//International Conference on Offshore Mechanics and Arctic Engineering.2006:OMAE2006-92137.
[9] Qi Xu,Stephen Perryman,Igor Prislin.Assessment of the horn mountain spar in hurricane ivan[C]//International Conference on Offshore Mechanics and Arctic Engineering.2007:OMAE 2007-29354.
[10] Steve Perryman,John Chappell,Igor Prislin,et al.Measurement,hindcast and prediction of holstein spar motions in extreme seas[C]//Offshore Technology Conference.2009:OTC 20230.
[11] Per Teigen,Sverre Haver.The Heidrun TLP:measured versus predicted response[J].Applied Ocean Research,1998,20:27-35.
[12] Perego R N,Li G,Beynet P A,et al.The Marlin TLP:measured and predicted responses during hurricane ivan[C]//Offshore Technology Conference.2005:OTC 17335.
[13] Aalberts P J.Summary Report Marco Polo Jip[R].2010.
[14] John R Frase,Xiao Qi Liang,Lindsay E Clark.Liuhua 11-1 development-design and fabrication considerations for the FPS[C]//Offshore Technology Conference.1996:OCT 8187.
[15] Reading & Bates Developments company.Liuhua 11-1 development FPS project-Mooring Design Report[R].
[16] Harp User Manual[S].