锚泊辅助动力定位系统推力器故障模式影响分析
2013-10-11王洪超
王洪超,王 磊,张 峰
(上海交通大学海洋工程国家重点实验室,上海 200230)
随着世界石油需求的激增,海洋工程迫切需要向深水领域发展。对于海洋浮式钻井系统来说,其安全性非常重要,定位系统是保证其海上正常生产作业的重要设备[1-2]。锚泊辅助动力定位系统是将锚泊定位系统和动力定位系统相结合的一种新型位置控制系统。它既能满足平台在较恶劣海况下的定位能力需求,又能降低动力定位时的燃油消耗,在深水作业中非常实用[3-4]。
对于海上钻井船舶和平台而言,由于操作的安全性极其重要,因此其动力定位系统一般采用三级动力定位设备,即DP-3。根据IMCA的动力定位分析报告,包括失位在内的动力定位事故主要由计算机、电力系统、参考系统和推力器故障引起,而这其中由推力器失效所造成的事故占比高达21%[5]。装载动力定位的深水半潜式钻井平台通常每个配电板负责两个推力器,且都为对角布置。在恶劣海况下,如果其中一个主配电板出现故障,则可能导致该配电板上的两个推力器同时失效,会对平台的可靠性和安全性造成很大的影响,因此考虑此种情况的故障模式分析是十分必要的。
以某深水半潜式平台为研究对象,在给定的环境载荷条件下,通过时域模拟计算分析了半潜式平台同一配电板两个推力器失效时对平台定位精度、功率消耗以及缆绳张力等方面的影响,同时提出了相关建议并进行了时域模拟的对比,为动力定位系统的FMEA,即故障模式与影响分析提供了相关参考。
1 平台时域运动方程
锚泊辅助动力定位系统的时域模拟又称为动态模拟,就是对在定位系统控制下的半潜式平台真实运动进行实时模拟。对运动状态作时域模拟能顾及到更多因素和限制条件,更接近实际情况,同时可以获得许多有价值的信息,如平台定位精度、功率消耗等[6-7]。半潜式平台在外力作用下的低频运动方程:
式中:u,v,w 为线位移速度;p,q,r为角位移速度;m 为平台质量,包含流体附加质量;Ixx,Iyy,Izz,Izx为质量惯性矩,也包括附加质量部分;X,Y,Z分别为x,y和z方向的外力;K,M,N分别为x,y和z方向的外力矩。这里的附加质量为低频运动下的附加质量,与运动的频率无关,由水下的几何形状决定。
推力器的推力、转矩及功率消耗的计算公式:

式中:n为螺旋桨转速,Q为螺旋桨转矩,D为螺旋桨直径,KT为推力系数,KQ为转矩系数,KT、KQ可根据轴向进速在螺旋桨敞水性能曲线上查取。
2 计算模型
2.1 半潜式平台参数
目标平台为深水半潜式钻井平台,平台主要尺度如表1所示。主要组成部件包括:下浮体2个、立柱4根、主甲板、箱形甲板、居住舱楼、井架台、井架、起重机、直升机平台等。

表1 半潜式平台主要参数Tab.1 Main parameters of the semi-submersible platform
2.2 推力器布置
平台推力器采用八个全方位螺旋桨,均为Ka系列,具体参数如表2所示。推力器布置为“内八”形式,T1~T8代表1号到8号推力器,8个推力器由4个主配电板配电,每个配电板负责的推力器均为对角布置。1、4、5、8号推力器到横纵中心线距离分别为15.70 m和35.50 m,2、3、6、7号推力器到横纵中心线距离分别为47.02 m和24.58 m,如图1所示。这种布置的优势在于拉大了推力器之间的距离,能够有效降低桨-桨干扰,可缩小推力器禁止角范围,推力器设置禁止角区域[8]如表3所示。

表2 推力器参数Tab.2 Main parameters of azimuthing thrusters

表3 推力器禁止角度设置Tab.3 Forbidden angle of azimuthing thrusters
2.3 锚泊系统布置
锚泊系统布置形式如图2所示,为悬链线锚泊系统,采用三段复合式锚缆,可用复合缆悬链线方程进行求解[9]。从海底到海面各部分材料的长度分别为:底部锚链长度1 850 m,中部聚酯缆长2 650 m,顶部锚链长度150 m。其中,锚链最小破断强度为8 379 kN,聚酯缆最小破断强度为7 840 kN,系泊缆绳的预张力为436 kN。锚链线端点位置如表4所示。

图1 推力器布置示意Fig.1 Layout of thrusters

图2 锚泊系统布置示意Fig.2 Layout of mooring lines

表4 锚链线端点位置Tab.4 Mooring lines position
2.4 海洋环境载荷
由于风、浪、流同向作用时为最恶劣的环境条件,故取风、浪、流同向联合作用作为计算的环境条件,其具体参数如表5所示。环境载荷作用方向取为180°,即环境力方向与x轴正向相反,计算水深取为1 500 m。

表5 环境条件Tab.5 Environmental condition
3 计算结果与分析
3.1 数值模拟
分别对推力器完整模式和同一配电板上两推力器失效模式下的锚泊辅助动力定位系统进行了时域模拟研究。考虑到平台的对称情况,选取推力器T1、T5失效和推力器T3、T7失效两种失效模式进行时域模拟,模拟时间为10 800 s,记录数据步长选为24 s。最终得到推力器完整模式以及两种推力器失效模式下平台水平偏移以及功率消耗的时历曲线,分别如图3和图4所示。以1号缆绳为例,给出了1号缆绳在推力器完整模式以及两种推力器失效模式下的缆绳张力时历曲线,如图5所示。

图3 不同模式下平台水平偏移时历曲线Fig.3 Offset time trace under different modes

图4 不同模式下平台消耗总功率时历曲线Fig.4 Power consumption time trace under different modes

图5 不同模式下缆1张力时历曲线Fig.5 Time trace of top tension of mooring line No.1 under different modes
当同一配电板上的两推力器失效后,可以采取相关措施减小平台偏移:
措施1,通过减小或取消失效推力器相邻推力器禁止角区域的方法,使其余正常工作的推力器能够更充分地发挥作用来保持平台位置。当推力器T1、T5失效时,可以取消T2在-9°到-29°和T4在-10°到10°的禁止角区域;当推力器T3、T7失效时,可以取消推力器T8在9°到29°的禁止角区域,时历曲线如图6所示。
措施2,可以通过拉紧迎风缆绳并松弛背风缆绳的方法来减小平台偏移。在此环境条件下,缆1、缆2、缆7、缆8的缆绳处于张紧状态,为迎风缆;缆3、缆4、缆5、缆6处于松弛状态,为背风缆。拉紧缆1、缆8并松弛缆4、缆5,时历曲线如图7所示。
最终得到各工况下平台水平偏移统计值和平台消耗总功率统计值分别如表6和表7所示。计算得到8根缆绳张力时历的最大值如表8所示。
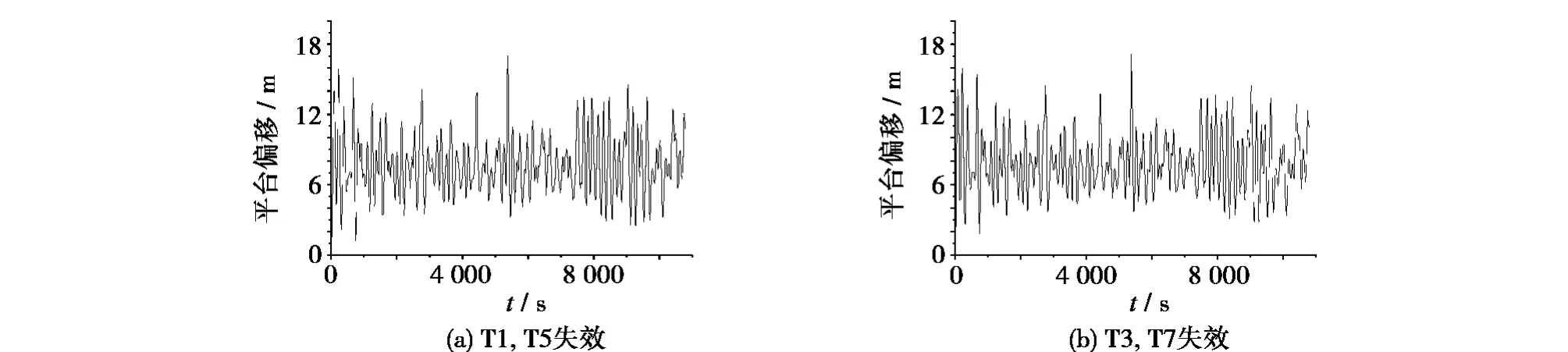
图7 不同失效模式下采取措施2平台偏移时历曲线Fig.7 Offset time trace under different failure modes with method 2

表6 平台水平偏移统计值Tab.6 The statistic values of the platform offset

表7 平台消耗总功率统计值Tab.7 The statistic values of the platform consumed power

表8 缆绳张力最大值Tab.8 The maximum values of top tension of the mooring lines
3.2 结果分析
1)由图3和表6可以看到:三种模式下,平台水平偏移的最大值分别为14.38 m、19.38 m和19.49 m,分别为1 500 m水深的0.96%、1.29%和1.30%,精度均控制在水深的2.5%以内。根据DNV-OS-E301中要求,在此环境条件下三种模式均能满足平台的定位精度要求。推力器T1、T5失效时和推力器T3、T7失效时平台偏移量最大值分别增大了34.8%和35.5%,平台的平均偏移量分别增大了41.3%和44.9%。可以看出,两种推力器故障模式下,平台的偏移最大值和平均偏移值都有着非常显著的增加,这对平台的定位是十分不利的。同时,对比两种故障模式下平台的水平偏移,可以看出推力器T3、T7失效时影响更大。这是由于T1、T5到平台中心的水平距离为38.8 m,而T3、T7到平台中心的水平距离为53.1 m,推力系统中处于外侧的推力器能输出更大的力矩,从而T3、T7失效时要比T1、T5失效时更容易失位。
2)由图4和表7可以看出:两种推力器故障模式下平台平均消耗总功率分别增大了2.43%和2.41%。两个推力器失效后,推力器消耗总功率没有下降,反而有一定的增幅,导致其余6个推力器的工作负荷增大,这将使推力器的磨损更加严重。另一方面,系泊缆绳提供了一部分回复力,使得平台推力器失效时的能耗并没有非常大的增幅,在保证定位精度的情况下使平台仍留有一定的功率储备,保证了平台的安全性。
3)由图5和表8可以看到:缆1、缆2、缆7、缆8在两种推力器失效模式下张力都有所增加,缆1和缆8的张力增幅尤为明显。其中所有缆绳张力的最大值出现在推力器T1、T5失效时的1号缆绳上,其值大小为480.3 kN。可以看到,由于动力定位系统的存在,使得系泊缆绳的张力仍留有较大的裕度,可以有效防止更加恶劣海况下缆绳出现断裂的情况发生。
4)由图6、图7和表6可以看到:同一配电板上的两推力器失效后,当采取措施1时,T1、T5失效和T3、T7失效两种模式的偏移平均值分别减小了5.4%和5.1%;当采取措施2时,T1、T5失效和T3、T7失效两种模式的偏移平均值分别减小了21.4%和22.3%。可以看到,两种措施均能有效减小平台偏移。实际工程中,推力器失效后,合理地取消一些禁止角区域,可以获得更好的定位精度;同时,缆绳的张紧程度是可以调节的,在风浪流联合作用的恶劣海况下拉紧迎风缆绳并松弛背风缆绳是非常有用的。
4 结语
分析了半潜式平台同一配电板上的两个推力器失效模式对平台定位精度、功率消耗和缆绳张力等方面的影响,并提出了相关建议,得到了以下结论:
1)在同一配电板上两推力器失效时,平台的水平偏移、功率消耗和缆绳张力都有不同程度的增加,尤其以平台外侧推力器失效时的影响更加显著。
2)分析中可以看出锚泊辅助动力定位系统在深水作业中的优势所在:既减小了缆绳所受张力,减小了恶劣海况时缆绳出现断裂的可能性,又节约了能耗,使缆绳张力留有一定裕度,平台留有一定的功率储备。
3)同一配电板上两推力器失效时,可以通过减小或取消失效推力器相邻推力器禁止角区域的方法,使其余正常工作的推力器能够更充分地发挥其作用来保持平台位置。同时在实际工程中,缆绳的张紧程度是可以调节的,在风浪流联合作用的恶劣海况下拉紧迎风缆绳并松弛背风缆绳是非常有用的,既减小了平台的水平偏移,又节约了平台的功率消耗。
4)动力定位系统的故障模式与影响分析旨在评估每种故障模式的影响并进行后果分析,同时给出降低或消除每种故障模式和其带来风险的方法。通过分析,为平台动力定位系统的故障模式与影响分析提供了相关参考。
[1] 金 秋,张国忠.世界海洋油气开发现状及前景展望[J].国际石油经济.2005.
[2] 赵志高,杨建民,王 磊等.动力定位系统发展状况及研究方法[J].海洋工程,2002,20(1):91-97.
[3] 孙 攀.深海半潜式钻井平台锚泊辅助动力定位系统研究[D].上海:上海交通大学,2011.
[4] Wichers J,Dijk R V.Benefits of using assisted DP for deepwater mooring systems[C]∥Offshore Technology Conference.1996.
[5] IMCA M 198,Dynamic Positioning Station Keeping Incidents-Incidents reported for 2007[S].2009.
[6] 孙 攀,王 磊,王 亮.深水半潜平台锚泊辅助动力定位系统功率消耗研究[J].海洋工程,2010,28(3):24-30.
[7] 周 利,王 磊.船舶动力定位系统与锚泊辅助动力定位系统的时域模拟比较[J].海洋工程,2009,38(4):154-157.
[8] 张 申,王 磊.动力定位推力系统研究[J].实验室研究与探索,2010,29(10):4-9.
[9] 黄 剑,朱克强.半潜式平台两种锚泊系统的静力分析与比较[J].华东船舶上业学院学报,2004,18(3):1-5.
