“嫦娥二号”卫星CCD立体相机的关键技术
2013-10-11赵葆常唐茜薛彬
赵葆常 唐茜,2 薛彬
(1中国科学院西安光学精密机械研究所,西安 710119)
(2中国科学院大学,北京 100049)
1 引言
21世纪初,国际探月活动十分频繁。2007年9月14日日本发射SELENE绕月探测卫星[1],上面的立体相机设计空间分辨率为10m,但因信号强度问题,在极区图像靠激光高度计数据镶嵌而成。2008年10月22日,印度发射了“月船一号”绕月探测卫星,其立体相机的空间分辨率从赤道的5m降到极区的160m[2]。2009年6月19日,美国发射了月球探测轨道器(LRO),其上搭载了一台普查相机,空间分辨率为 100m,用于全月成像;同时还有一台窄视场的详查平面相机(视场角约 2.85°,月面成像宽度为5km),用于局域高分辨成像,分辨率达0.5~1.5m[3]。2007年10月24日,中国成功发射了第一颗绕月探月卫星“嫦娥一号”(CE-1)[4],揭开了中国深空探测以及对月科学探测的序幕。之后不到3年时间,中国又发射了第二颗绕月探测卫星“嫦娥二号”(CE-2)[5]。日本、印度和中国都是立体相机,具有一定的可比性,而美国为平面相机(非立体,只有一个视角)。CE-2 CCD立体相机在对月高分辨率成像中首次采用了高灵敏度的时间延迟积分图像传感器,并成功实现速高比的自动补偿[6],可同时满足在100km圆轨及 15km×100km椭圆轨道上的立体成像要求,显示中国在对月高分辨率立体成像方面已进入到国际先进水平。
本文首先简单介绍了CE-1卫星CCD立体相机的技术方案及实施效果,之后进一步对CE-2卫星的CCD立体相机的技术方案、优化设计、速高比自动补偿以及实施效果做了较为详细的介绍。

图1 广角物镜加面阵CCD的立体成像方案原理Fig.1 Three-dimensional imaging principle of w ide angle lens and plane-array CCD
2 CE-2卫星CCD立体相机的技术方案
由于我国探月工程的第二阶段计划完成月球软着陆探测与月面巡视勘察,需要了解降落条件较好的虹湾地区的局域高分辨率的地形地貌。而CE-1相机的分辨率仅为120m,只能探测到直径大于360m的月坑,难以满足第二阶段探月需要。CE-2 CCD立体相机以获取分辨率优于10m的月球表面三维立体影像为科学目标,对CDD立体相机的多项关键技术进行了综合创新。
2.1 CE-1 CCD立体相机技术
CE-1采用了一个广角、消畸变、远心物镜,并在焦平面上配置一块1 024像元×1 024像元的面阵CCD,CCD之前加了一块刻有3条细缝的面罩(如图1所示),基本消除了面阵帧转移图像传感器在转移过程中的附加曝光。
该方案较传统方案的显著优点是:整台立体相机结构紧凑、质量轻、体积小,大大简化了焦平面的结构;3条线阵自动配准,配准精度高,航天环境适应性强。但该方案也有一定局限性:只适用于短焦距、较小的像方线视场的情况。
从成像的层面来看,此前对月面图像最全的美国克莱门汀相机分辨率为100m,但仍有很多漏拍的区域;CE-1相机分辨率为120m,却获得了当时最清晰、最完整的全月面立体图像。图2为CE-1与美国克莱门汀对同一目标所拍摄图像的对比,结果显示CE-1获取的图像更清晰而且完整。

图2 “嫦娥一号”CCD立体相机与克林门汀获取的同一月面图像比较Fig.2 Photographs for the same lunar area taken byCE-1and LROC
2.2 CE-2与CE-1 CCD立体相机技术指标对比
CE-2与CE-1 CCD立体相机的技术指标对比如表1所示。卫星在100km圆轨上的轨间距为32km,相机成像幅宽为43km,邻轨之间图像两边仍有5.5km重叠区以便于拼制全月图。可以看到CE-2立体相机的地元分辨率较CE-1得到了显著提高。在技术方面CE-2面临的最大挑战是信号强度与动态范围问题。

表1 CE-2与CE-1CCD立体相机技术指标Tab.1 The CCD stereo camera’ s technical specifications of CE-1 and CE-2
2.3 信号强度与动态范围分析
日本与印度学者的工作实际上已经证明:对全月面实现优于10m分辨率的立体成像,线阵CCD的探测灵敏度偏低。与美国 LROC方案相比,CE-2可在较大视场范围内实现同轨立体,并且对卫星的姿态控制没有特殊要求。
相对于全月7m 分辨率信号强度最低的极区而言,虹湾地区1m 分辨率成像的信号强度更低,因为它的曝光时间要短7倍多,而且月面物质反射系数很低,约为0.05~0.1,属于低反射率的月海区。CE-296级TDICCD立体相机的在轨数据充分说明了这一点,在全月面7m成像时对极区极大部分地区只用到64级×1倍电子学增益,而虹湾地区成像时用到96级×2倍的电子学增益,这时两者输出的DN大致相当,约为30~50DN,这表明相对于100km极区的成像,虹湾的成像灵敏度应提高3倍(96×2/64=3)。
另一个是相机的成像动态范围评估,即在100km圆轨7m分辨率条件下,对最亮的目标不能产生饱和,而同时对最暗的目标(虹湾)又仍有一定的信号水平(即DN值),以保证一定的信噪比。表2是一个分析,当太阳高度角为90°时,月面可达到其最高反射系数0.25,此时用所选择的TDICCD的16级一倍电子学增益,信号水平为250DN,接近饱和;而对虹湾地区,该位置太阳高度角最大为40°,反射系数为0.08,选用96级二倍电子学增益,信号水平可达40DN,能够满足最低信号强度要求。因此大概需要有71倍的相机成像动态范围。

表2 最亮和最暗图像信号相对归一化值(评估值)Tab.2 Relative normalized values of the maximum and m inimum image signal
2.4 光学方案及设计结果
在对月高分辨探测中,国际上首次采用了TDICCD作为图像传感器,实际情况受限,选择如下参数的TDICCD:像元数6 144元,像元尺寸10.1μm×10.1μm,积分级数为16、32、48、64、96级共5档。如果有4、8、12、16、24级的TDICCD,则速高比补偿精度要求可以大幅度降低。
充足的能量利于优化光学系统的相对孔径与谱段范围。
(1)谱段范围的优选
图 3为 TDICCD的对比度传递函数(Contrast-Transfer-Function,CTF)与波长的关系曲线。
由图可知,CTF的峰值在 λ=450nm 附近, 在λ=450~520nm 的 光 谱 范 围 内 ,CTF约 为 0.9,MTF=π/4×CTF,约为 0.7。所有波长的光信号对于黑白照相机均转化为电子学输出(DN),无光谱信息,且月表物质的反射光谱也无波长选择性反射,因而选取450~520nm作为相机的工作谱段。它为获得整机高MTF奠定了基础。

图3 以波长为函数的TDICCD的CTF曲线Fig.3 CTF curves of TDICCD vs the wavelength
(2)相对孔径的优选
选取原则:通量与衍射MTF。本方案主要追求尽可能高的 MTF,原估计在 F/10(相对孔径)左右(可以达到衍射和像差间的最佳平衡),实际设计结果为F/9。
光学系统参数及其达到的性能指标:根据成像幅宽43km,单条TDICCD像元数6 144,则其地元分辨率为43km/6 144像元=7m(在100km圆轨时),折算到虹湾地区15km成像高度,地元分辨率为1.05m,成像幅宽为6.45m,均满足任务书要求。由式(1)计算焦距:

式中 H为成像高度;GSD为地元分辨率(7m);b为探测器像元尺寸(10.1m)。算得f´=144.3mm,根据100km成像高度及43km成像幅宽,可得到横轨方向视场角为23.26°;又根据要求前视为8°,后视为–17.2°,沿轨方向最大视场角为17.2°,总视场角为2up=42°。
综合以上分析,最终确定光学系统参数为:f´=144.3mm,F/9,2up=42°,6组7片,Lak2与TF3两种玻璃。系统MTF的设计值如图4所示,设计传函接近0.7,其中前视8°均值约为0.68,后视–17.2°约为0.66。

图4 光学系统的设计MTFFig.4 MTF of optical system
TDICCD立体相机推扫示意如图5所示。

图5 CE-2卫星有效载荷CCD立体相机推扫示意Fig.5 Schematic diagram of CE-2 CCD stereo camera
表3 给出了该TDICCD立体相机在两种轨道上的成像参数。实际结果均满足或优于任务书要求。

表3 CCD立体相机设计技术参数Tab.3 Designed technical parameters of the CCD stereo camera
决定相机静态MTF的两个最主要因素为光学系统设计MTF及探测器MTF,由此估计静态MTF可达到0.47,考虑加工、装配、电子学等因素,估计相机实际静态MTF可以达到0.4左右,发射前的检测结果前视8°为0.42,后视17.20°为0.4,与评估一致。
相机为非像方远心,作为比较,同时也设计了相同参数下的像方远心系统。其 MTF与非像方远心系统基本相同,但在光学系统最后需增加两块透镜,且这两块透镜的口径达 Φ120mm(像面尺寸η´= f´·tan up=111mm,而在非远心系统中最大一块透镜的尺寸为Φ69mm),大大增加了光学系统的质量与尺寸,为此采取了电子学平场的方案,并控制出射视场角up´<20°,即为现在的结果,相机本机质量<10kg。
电子学平场的实施方案中,将单条TDICCD的6 144个像元分为12个通道(抽头)输出。每个抽头管 512个像元,把每个抽头的前置放大倍率设计为不同值。若中间两片归化为 1,则最边缘的值约为1.3~1.4倍。具体做法是,先观察12个通道的输出曲线,然后计算每个通道的电子学放大倍率。在技术流程中,该阶段被称为“通道初调整”,然后在定标中进行精密平场。通道初调时,不考虑像元间不均匀性,而在定标平场时,需对像元间输出的非均匀性进行修正。
3 速高比补偿
TDICCD作为图像传感器,其在成像时必须满足苛刻的条件——TDICCD器件电荷包的转移速率要与目标像在焦平面上的运动速度相匹配,即速高比补偿。当成像条件不满足上述要求时,沿轨方向上MTF就会下降,从而降低图像的品质。TDICCD技术在我国地球卫星中已经得到成功应用[8],美国在对火星的高分辨率成像中也采用了相同的技术[9]。但是在对月球的高分辨率成像中采用 TDICCD,国内外都尚属首次。相对于地球卫星,月球卫星实现速高比补偿技术难度更大,主要原因为:1)月球卫星轨道高度低;2)月球卫星无GPS技术的支持;3)月面的地形起伏大;4)月球没有精密的高程数据DEM。
3.1 速高比补偿实施方案
CE-2采用了两套实施方案,即
(1)地面计算
首先,计算预报的轨道参数:包括轨道高度H´、卫星速度Vsat及与之相对应的卫星星下点的经度与纬度。再根据经度与纬度,由月球的高程图DEN得到相对应的月球表面起伏h[10],H= H´–h。然后计算行频TC(对应经度与纬度)。将上述参数打包,提前上行注入。当卫星飞抵某一经纬度时,相机按相应的行频工作,根据实际的轨道测量通过外推得到预报的轨道参数,预报时间可以是24h、48h等。
(2)在轨计算
利用激光高度计得到卫星距月球表面的距离H,同时利用上行注入的预报的星下点速度V(与经纬度相对应),计算速高比(行频),在星上闭环实时完成速高比补偿。图8即为速高比计算误差举例,其中(a)为所要进行处理区域的图片,(b)为对该图片进行处理的数据图。
速高比的两个参数卫星高度与速度中,实际速度的影响很小,卫星高度是造成速高比的变化主要因素。
两种速高比补偿方案各有利弊,互为补充。对目标主要是平原的虹湾地区,成像幅宽小(约6km),可采用在轨计算行频为主。充分利用激光高度计测量精度高的优势,同时减轻地面工作人员负担。而对于月面起伏大的地区则采用地面计算行频的方案。在地面计算行频时,采用了条带平差技术,这是因为成像有一定的幅宽,特别是在100 km圆轨时,月面成像宽度达43 km,在43 km宽度上月面会有起伏,若采用星下点数据,引入误差较大,因此方案采用了各个条带(100km圆轨对应月表各条带尺寸为43 km×7 km)的均方值。经过运算处理后,对99%以上的区域,误差范围不超过±500m[6]。
3.2 在轨速高比配准试验
为了在轨实际验证速高比方案的正确性,于2010年10月25日,进行了速高比配准的在轨试验,图6(a)为速高比人为失配25%获得的图像,此处的速高比失配是人为的通过从地面向卫星上传一个失配的帧频指令,相机按照该指令执行获得图片。图6(b)为地形地貌与图6(a)相似且经过本文速高比补偿方案补偿的图像。试验的目的是为了验证当没有速高比补偿时对图像品质的影响。
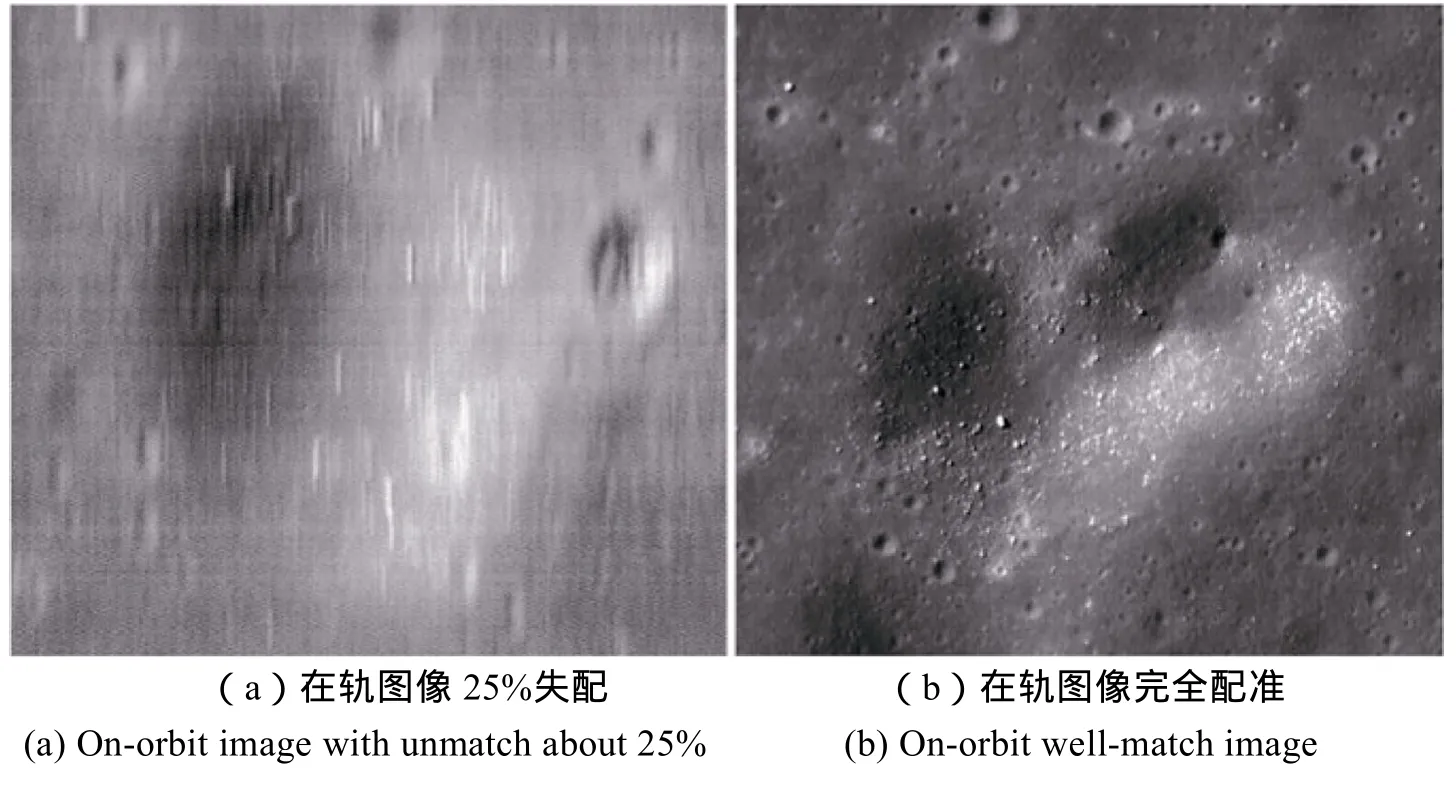
图6 在轨图像的完全配准与非完全配准效果对比图Fig.6 Contrast between well-match and unmatch on-orbit images
4 在轨图像评价
图7(a)是CE-2相机拍摄的图像[11],图7(b)与美国月球探测轨道器相机LROC(窄视场,详查)拍摄的月表同一地点图像图7(a)的比较。
LROC相机与“嫦娥二号”相机的空间分辨率大致相同约1.5m(实际中国1.3m,美国1.5m)。从视觉感官效果来看,图7(a)好看,因为它拍摄时的太阳高度角很低,约为5°,太阳光从左向右照射,照亮了右坑壁的上部,但坑底、右壁下部及左坑壁被遮挡,形成明显的黑白对比。而图7(b)拍摄时太阳高度角约为30°多,而该坑又比较浅,所以没有明显的光线遮挡,视觉效果不如左图,但对科学家来说,右图更有价值,因为它把月坑的所有细节,如坑底坑壁四周的石块都明显地显示出来了,而左图因为光线遮挡的原因丢失了很多有价值的信息。
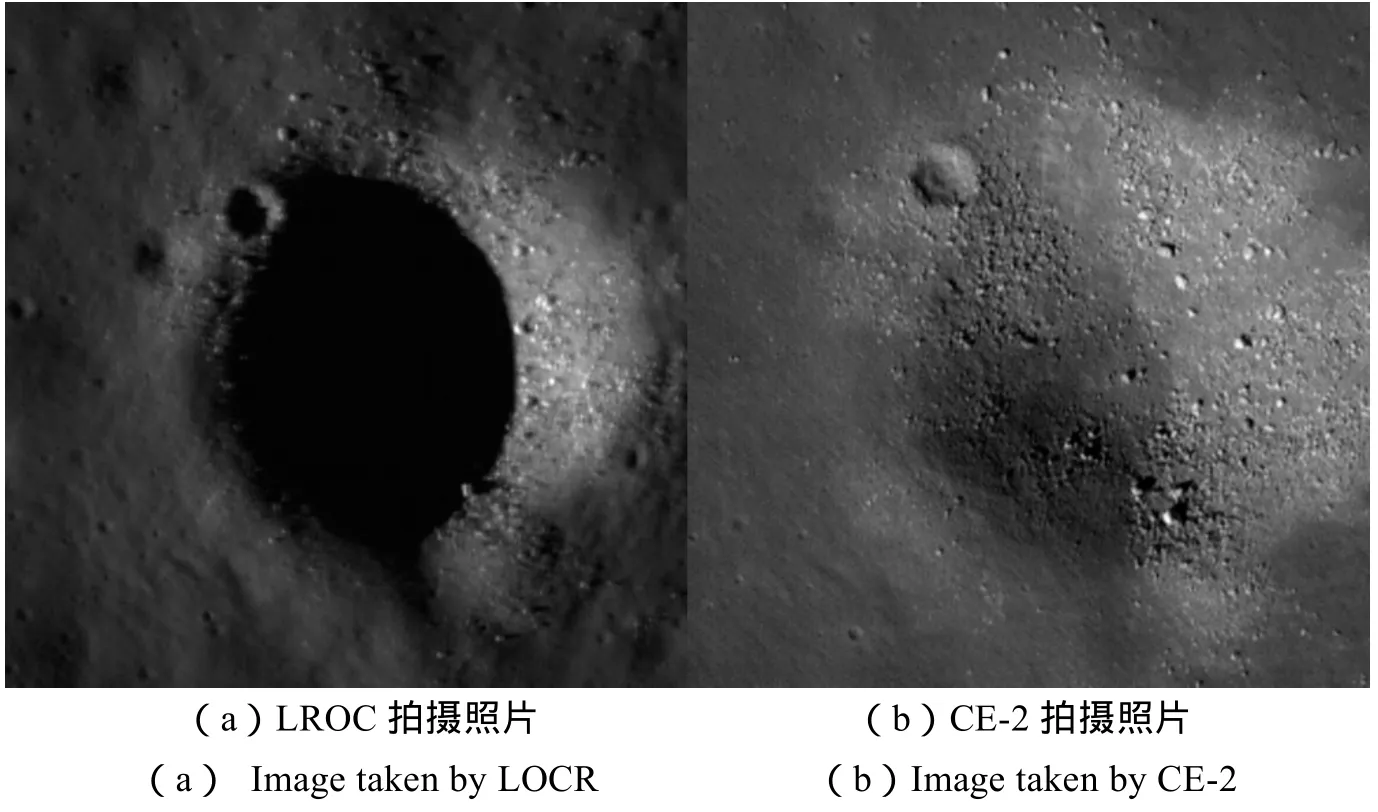
图7 LROC与CE-2拍摄的图像对比Fig.7 Contrast between the images taken by LOCR and CE-2
CE-2卫星两次调轨到15km×100km椭圆轨道,因为该轨道的生存时间仅为2天,所以每次只能获取16轨正式图像,共获32轨道正式图像及3轨试验图像,图像的地元分辨率为1.3m,代表性照片如图8所示;在100km圆轨上共获取572张地元分辨率为7m的图像(含试验性图像),成像宽度为43km,全月面100%覆盖,是目前国际上分辨率最高的全月面立体图像,其中代表性月球图像如图9所示。
由于CE-2要在虹湾为“嫦娥三号”的着落船寻求最佳着落点,图10 被视为是CE-2任务成功的重要标志之一。
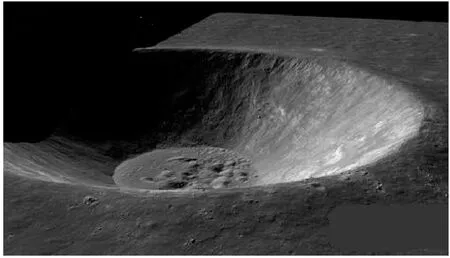
图8 近月弧段上拍摄的拉普拉斯–A的立体图像(GSD约为1.3m)Fig.8 3D image taken by Laplace-A on near lunar arc(GSD is about 1.3m )

图9 极区典型环形坑(GSD约为7m)Fig.9 Typical Crater at the polar region(GSD is about 7m)

图10 “嫦娥二号”拍摄的虹湾局部影像(GSD约为1.3m)Fig.10 Partial image of Sinus Iridium taken by CE-2 (GSD is about 1.3m)
5 结束语
CE-2 CCD立体相机到目前为止已经完成了其工程目标与科学目标。它首次将TDICCD技术应用到对月球的高分辨率成像中,由于采用了速高比自动补偿手段,从而使在轨图像清晰、层次丰富。7m分辨率的全月面图像是迄今为止分辨率最高的全月面图像。CE-2卫星的设计寿命为半年,但是由于追加了科学任务它目前仍处在正常状态下继续工作。
References)
[1]Tsuneo Matsunaga, Makiko Ohtake, Yasuhiro Hirahara, et al. Development of a Visible and Near Infrared Spectrometer for Selenological and Engineering Explorer(SELENE)[C]// Proceedings of SPIE 4151, Hyperspectral Remote Sensing of the Land and Atmosphere. Bellingham,WA:SPIE, 2001: 32-39.
[2]Kumar A S K, Chowohury A R. Terrain Mapping Camera for Chandrayaan-1[J]. Earth Syst. Sci., 2005, 114(6): 717-720.
[3]Robinson M, Brylow S, Tschimmel M, et al. Lunar Reconnaissance Orbiter Camera (LROC) Instrument Overview[J]. Space Sci Rev., 2010, 150(1): 81-124.
[4]赵葆常, 杨建峰, 汶德胜, 等. 嫦娥一号卫星CCD立体相机的设计与在轨运行 [J]. 航天器工程, 2009, 18(1): 30-36.ZHAO Baochang, YANG Jianfeng, WEN Desheng, et al. Design and On-orbit Measurement of Chang’E-1 Satellite CCD Stereo Camera[J]. Spacecraft Engineering, 2009, 18(1): 30-36. (in Chinese)
[5]赵葆常, 杨建峰, 汶德胜, 等. 嫦娥二号卫星CCD立体相机设计与验证 [J]. 航天器工程, 2011, 20(1): 14-21.ZHAO Baochang, YANG Jianfeng, WEN Desheng, et al. Chang’E-2 Lunar Orbiter CCD Stereo Camera Design and Validation[J]. Spacecraft Engineering, 2011, 20(1): 14-21. (in Chinese)
[6]XUE Bin, ZHAO Baochang, YANG Jianfeng,et al. Auto-compensation of Velocity-height Ratio for Chang’E-2 Lunar Satellite CCD Stereo Camera[J]. Science China Technological Sciences, 2011,54(9): 2243-2246.
[7]ZHAO Baochang, YANG Jianfeng,WEN Desheng, et al. Overall Scheme and On-orbit Images of Chang’E-2 Lunar Satellite CCD Stereo Camera[J]. Science China Technological Sciences, 2001, 54(9): 2237-2242.
[8]Xu X L, Zhao L, Fu Zh p.Application of TDICCD Image Sensor in Reconnaissance Camera (in Chinese)[J]. Transd Tech,2001, 11: 46-49.
[9]Mc Ewen A. MRO’s High Resolution Imaging Science Experiment (HiRISE)[J]. Geophys. Res., 2007, 112: 1-25.
[10]Cai Z C, Zheng C M, Tang Z S, et al. Lunar Digital Elevation Model and Elevation Distribution Model Based on Chang’E-1 LAM Data[J]. Science China Technological Sciences, 2010, 53: 2558-2568.
[11]李春来. 嫦娥二号高分辨率月球影像图采集[M]. 北京:中国地图出版社, 2012 LI Chunlai. Anthology of CE-2’s High Resolution Lunar Images[M]. Beijing: China Map Press, 2012. (in Chinese)
