载人月面着陆及起飞技术初步研究
2013-10-11果琳丽王平梁鲁田林
果琳丽 王平 梁鲁 田林
( 1 西北工业大学宇航学院,西安710000)
(2 中国空间技术研究院载人航天总体部,北京100094)
1 引言
将中国人送上月球,是中华民族的千古梦想。随着我国载人航天和月球探测两大航天科技工程的顺利实施,开展载人登月工程的技术基础已经基本具备。纵观世界各国提出的载人登月计划可知,由于受限于各国重型运载火箭运载能力的大小,可采用直接登月、近地轨道一次或多次交会对接、环月轨道交会对接及近地+环月轨道交会对接等多种飞行模式[1]。但无论何种登月飞行模式,都必然包含载人月面着陆及起飞阶段,这也是整个载人登月工程最具特色的飞行阶段。剖析载人月面着陆及起飞技术的内涵和关键技术,对深入认识载人登月飞行器系统的技术体系具有重要意义。
2 载人月面着陆及起飞技术内涵
2.1 载人月面着陆及起飞飞行方案简介
2.1.1 载人月面下降及着陆过程
参考美国“阿波罗”登月及“星座”计划飞行方案,可将载人月面下降及着陆过程可以划分为5个飞行阶段:主制动段、姿态调整段、接近段、悬停段和垂直下降段[2-3]。如图1所示。
1)主制动段:从到达月面15km处进行制动,目的是消除登月舱的轨道速度,此时下降级主发动机处于最大推力状态。
2)姿态调整段:主制动段结束后,登月舱进行姿态机动,将对月面进行地形观测的三维成像敏感器对准着陆区,便于航天员对着陆区进行地形察看。
3)接近段:登月舱下降到距月面 3km高度,完成粗避障及选择初步着月点,要求登月舱在接近过程中保持接近垂直姿态,采用接近 45o斜线下降方式逐步接近着陆区,此时下降级主发动机启动变推力控制状态。
4)悬停段:登月舱悬停在离月面 30m附近,相对月面速度接近零。悬停的主要目的是对着月点进行精障碍检测及选择精确着月点,并平移调整至着月点上方。悬停阶段发动机推力应与登月舱的重力相平衡,因此要求登月舱主发动机具有深度变推力调节能力。
5)垂直下降段:登月舱从着月点上方30m平稳缓速下降,直到收到关机敏感器信号后关闭发动机,要求登月舱保持垂直月面姿态,消除水平方向速度,以自由落体方式着陆月面,需保证月面着陆的稳定性。
2.1.2 载人月面起飞过程
参考美国“阿波罗”登月及“星座”计划飞行方案,载人月面起飞过程可以划分为3个飞行阶段:垂直起飞段、姿态调整段及射入段[2-3],如图2所示。

图1 载人登月月面着陆飞行过程示意Fig.1 Sketch of manned lunar landing flight process

图2 载人登月月面起飞飞行过程示意Fig.2 Sketch of manned lunar lifting off flight process
1)垂直起飞段:可以分为2个阶段,前0~2s为无控段,不进行任何姿态控制,确保上升级安全可靠地从下降级上起飞,之后进行姿态控制,使上升级沿月球重力反方向上升。
2)姿态调整段:进行登月舱上升级姿态调整,使姿态满足射入段显式制导初始状态要求。
3)射入段:上升级采用显式制导律,直至进入目标轨道,当满足入轨条件后,上升级发动机关机,确保精确入轨的精度。
2.2 载人与无人月面着陆及起飞技术的差异
与无人登月采样返回任务相比,载人任务最大的特点是“有人”,因此需特别考虑有人参与带来设计准则的变化,即重点考虑以下3个方面:
一是人的适应性问题,即需重点考虑人体对月面软着陆及上升过程的承受能力,在登月舱过载、冲击、姿控速度、环境温度、湿度、压力体制等技术指标上有所限制;考虑密封舱航天员座位布局方位与人能承受过载方向的关系。
二是人的参与性问题,即需留有人机接口及人机交互界面,以保证航天员作为控制系统的一个环节参与到闭环控制中,并在制导和控制过程中考虑人工操作的对飞行器高度、速度和姿态等的约束条件,防止航天员出现事故,此外还需考虑人对登月舱各系统的故障检测和处理的需要。
三是人的安全性问题,即为了保证人员的安全,整个飞行器的可靠性安全性要求将更高,各个环节的入轨精度要求更高,控制系统需在快速性、精确性、鲁棒性上提高,还需充分考虑各种故障条件下的应急救生方案;登月舱需保证在月面着陆和起飞过程中不翻到;最重要的是需严格控制飞行任务周期,充分考虑航天员执行任务时间与登月舱可支持的环控生保能力的关系等。
此外,因为有人的参与,载人登月舱通常比无人登月舱的质量和体积大数倍,推进剂携带量往往占整个飞行器质量的75%以上,在月面下降着陆和起飞过程中因推进剂的大量消耗,而成为实时变质量变惯量飞行器,整个飞行过程的制导、导航与控制技术(Guide、Navigation、Control,GNC)将更加复杂。为了提高月面着陆器结构效率,推进系统通常采用低温推进系统,由此带来更多的技术难点。
2.3 载人月面着陆及起飞技术体系分析
载人月面着陆及起飞技术是指安全有效地将登月舱从环月轨道降落到月球表面,航天员执行月球表面科学任务后,从月球表面起飞、调姿后进入环月轨道,并满足环月轨道交会对接初始条件的技术,无论对于执行短期载人登月任务还是构建载人月球基地等长期月球任务,都是不可或缺的一项核心关键技术。载人月面着陆及起飞技术的关键性能指标有:运送至月面人数、科学及工程载荷质量、月面停留天数、着陆冲击载荷,过载、姿控精度、着陆精度、环月入轨精度、系统可靠性安全性等等,这些指标间通常是互相耦合的,涉及到登月舱的硬件及软件设计、月面着陆点选择等各个方面。
载人月面着陆及起飞技术体系初步分析如图3所示,主要包括飞行器系统技术及仿真与试验技术。以美国A ltair登月舱为例,其飞行器系统技术主要针对登月舱的上升级、下降级及气闸舱等系统组成部分开展顶层任务分析,结构机构技术、环控热控技术、制导导航与控制技术、信息及测控通信技术、空间推进技术以及应急救生技术的设计等等。开展地面试验和飞行试验是验证载人登月舱系统技术的基础,然而通常开展这些实物验证试验耗资巨大,未来工程实施中将更多地依靠计算机虚拟仿真来进行验证,逐步提高技术成熟度,推动工程应用。初步分析仿真与试验技术中主要包括飞行任务综合仿真技术、着陆点选址与探测技术、月面环境分析与模拟技术、人在回路的系统仿真技术及大型地面试验验证技术等。
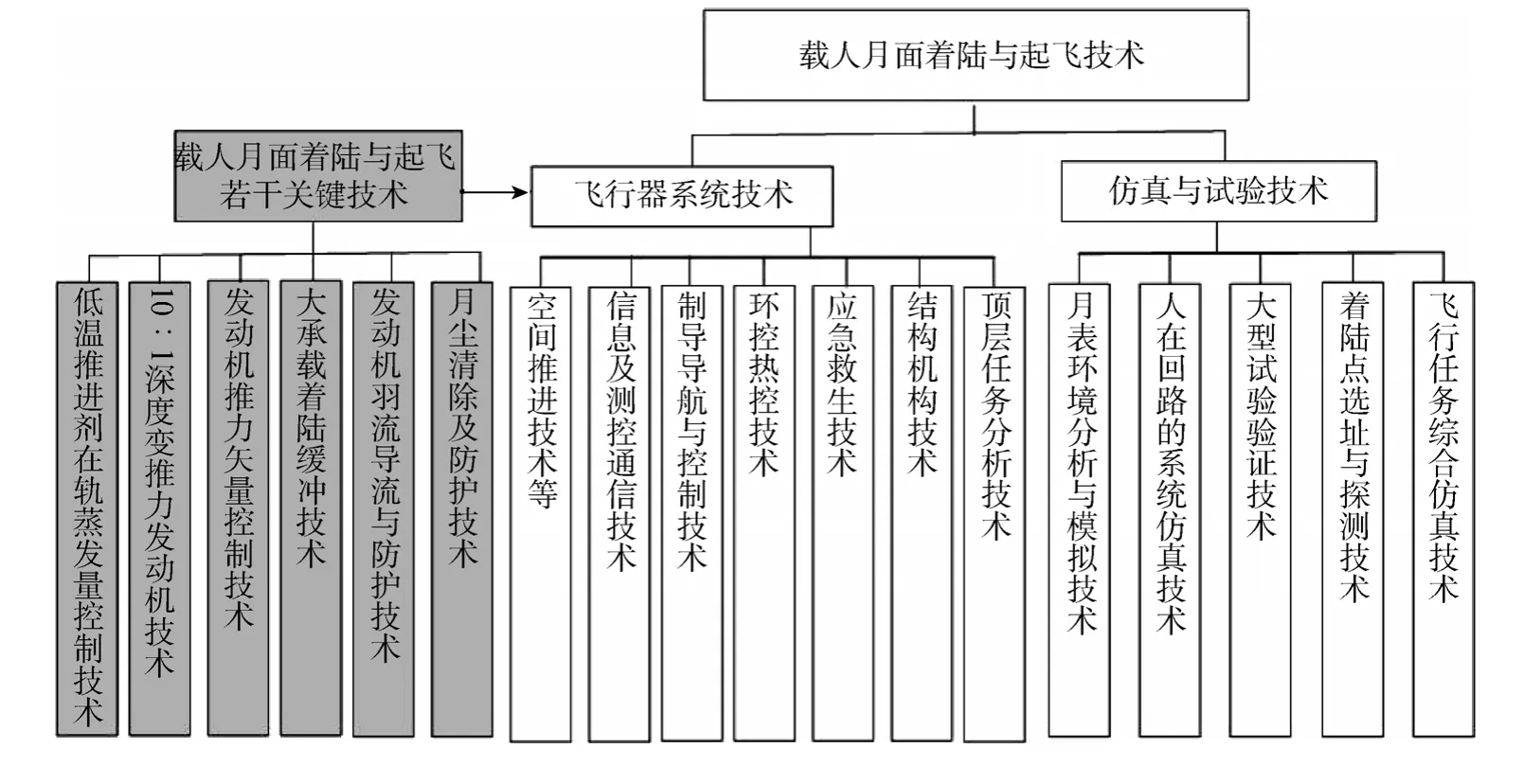
图3 载人月面着陆与起飞技术体系示意图Fig.3 Sketch of manned lunar landing and lifting off technology system
3 载人月面着陆及起飞若干关键技术研究
3.1 低温推进剂在轨蒸发量控制技术
为提高载人登月舱的运输效率和月面可达区域范围,通常采用高比冲的空间低温推进系统,例如采用液氧/煤油、液氧/甲烷、液氢液氧等低温推进系统等。采用低温推进系统的关键问题是解决低温推进剂在轨蒸发量控制问题,通常可采用被动控制和主动控制两类技术。经研究对于飞行任务周期不大于45天的载人登月任务,多以采用被动控制方案为宜。被动控制技术通常采用多层隔热技术(Multiple Layers Insulation,MLI),即在贮箱外壁包覆多层绝热层,在多层结构间加设气冷屏结构,在低温贮箱与登月舱主结构之间采用最小化热穿透结构设计,以此来大幅减少辐射传热和结构漏热而达到高效绝热的目的。这种方案具有效率高、质量轻、预冷快、加工制造容易的优点,适用于短期空间任务。
低温贮箱的日蒸发率控制是衡量低温推进剂蒸发量控制技术的关键指标,对确定登月舱总体参数有较大影响。以A ltair二级构型登月舱为例,假定登月舱总质量为45t[2],下降级采用液氧/煤油低温推进系统,则下降级液氧日蒸发率与登月舱总质量的影响关系见图4。从图中可知液氧低温推进剂的日蒸发量若能减少0.1%,则地面可少加注约600kg液氧推进剂,由此可见低温推进剂在轨蒸发量控制技术对提高登月舱总体性能指标的重要意义。
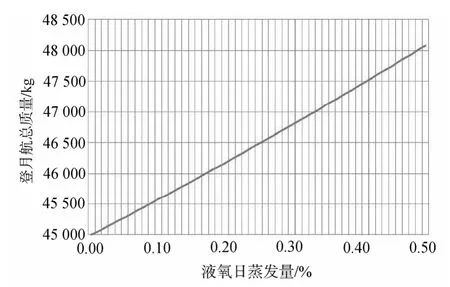
图4 低温推进剂日蒸发率与登月舱总质量的变化关系Fig.4 Relation between daily evaporation of cryogenic propellant and lunar lander total mass
3.2 10∶1深度变推力液体发动机技术
美国“阿波罗”及“星座”计划中的登月舱,都采用了10∶1深度变推力、可多次启动、双向摇摆的液体发动机,不同的是“阿波罗”登月舱下降级采用常规氦气挤压式推进系统,Altair登月舱下降级采用低温泵压式推进系统[3]。当前国际上已经实现的深度变推力液体发动机,如表1所示。

表1 国际上已实现的深度变推力液体发动机概况Tab.1 International liquid rocket engines w ith large thrust variation
变推力液体发动机最突出的特点是对工作条件大范围变化的适应性及推力调节,从表1可知大推力双组元液体发动机的推力控制方法通常有以下几种[4-5]:
1)控制推进剂流量来实现推力调节。挤压式发动机通过设置可变面积流量调节器,改变管路流阻特性实现流量控制;泵压式发动机通过设置涡轮旁通电动调节阀,改变涡轮泵功率实现流量控制。“阿波罗”登月舱下降级发动机,通过采用针栓式喷注器可实现10∶1的推力大变比。移动针栓式喷注器上套管能在临近喷口处同时控制燃料和氧化剂流量,容易实现在不同流量下所需的喷射速度,可使深度变推力发动机维持较高的燃烧效率,减小对流动不稳定的敏感性。
2)采用如“星座”计划中A ltair登月舱下降级发动机固定流通面积的喷注器,通过提高燃烧装置液路喷嘴压降,保证低工况下喷嘴压降满足可靠工作要求,同时增加主推进剂供应液路和气路流量调节装置,以实现推力调节。
3)设置高低2个工况工作模式,降低调节器设计难度和提高可靠性。通过2种工况调节范围相互叠加,可形成如苏联L-3登月舱下降级6.4∶1的变推力能力。但这种调节方法对登月舱下降过程的GNC控制方案产生较大的影响,可行性需要综合考虑。
3.3 发动机推力矢量控制技术
发动机摇摆控制技术(Thrust Vector Control,TVC)通常用于液体火箭和导弹武器系统中,传统的航天器通常采用姿控喷管进行姿态控制。但在“阿波罗”登月舱和Altair登月舱下降级发动机推力控制方案中,都采用 TVC方法来进行姿态控制,主发动机摆角可达到双向摆动±6o。TVC方法即指采用伺服机构作为控制系统执行机构,由伺服机构带动发动机喷管摆动,改变推力矢量的方向,从而达到按需要的控制律进行推力无损摆动控制的目的。“阿波罗”登月舱和Altair登月舱的下降级都只有1台主发动机,通过双向摇摆可以完成俯仰和偏航通道的控制,滚动通道的控制需要单独携带姿控发动机、或由上升级的姿控发动机来控制。伺服机构通常有电动伺服机构、电液伺服机构及燃气液压伺服机构等,液体火箭发动机通常采用电液伺服机构,此类伺服机构具有控制精度高、响应速度快、信号处理灵活、输出功率大、运动平稳以及质量小、体积小等突出优点。对于载人月面下降任务而言,采用何种类型的伺服机构还需从系统层面进行综合考虑。
3.4 大承载着陆缓冲技术
月球表面地形环境复杂,在低、中高纬度和两极等不同区域的地形地貌各不相同。为确保各种任务下航天员的安全,需大幅提高登月舱着陆缓冲机构的环境适应能力。与无人采样返回任务相比,载人登月舱质量规模大,外形尺寸大,质心高度高,着陆稳定性变差,同时因为有人参与,着陆冲击载荷需更小,以防止对航天员的伤害。载人登月舱的下降级作为上升级的月面起飞发射平台,对初始定位和瞄准有更高要求,要求着陆缓冲机构还具备相应的发射平台调平能力。缓冲器是月面着陆缓冲机构的核心和关键部件,根据缓冲材料的不同,缓冲器主要包括蜂窝铝缓冲器、液压缓冲器和磁流变液缓冲器等多种类型。铝蜂窝缓冲器通过铝蜂窝材料的溃缩来吸收冲击能量,其主要优点是质量轻,输出加速度小,工作可靠,但铝蜂窝缓冲器工作后将产生永久变形,不可恢复、不可调节;液压缓冲器利用液体和阻尼孔的摩擦产生阻尼力,具有承载能力强和缓冲平稳的优点,在增强液体可压缩性或增加液压输送装置后,可使缓冲器具备可恢复和可调节的功能,是实现大承载可调节着陆机构的重要技术途径;磁流变液缓冲器利用电磁场变化改变液体粘度的机理来实现对缓冲阻尼力的控制,磁流变液缓冲器具有体积小、变形后可恢复的特点,相比液压缓冲器其还具备阻尼力可控的特性,但在国内外航天领域中这类缓冲器尚处于研发阶段,技术成熟度尚不足。随着该技术的不断成熟,在载人登月舱大承载可调式缓冲技术中,磁流变液缓冲器也是一个重要的可选技术途径[6]。
3.5 发动机羽流导流与防护技术
月面上升过程通常以登月舱下降级发动机顶面为起飞平台,由于上升级喷管和下降级顶面间距非常小,在上升级发动机点火之后,为防止火焰回卷对上升级结构造成较大的力、力矩及热方面的影响,需要在下降级的顶面设置发动机羽流导流装置,并对上升级局部结构进行防护。“阿波罗”和A ltair登月舱的上升级发动机都采用1台恒定推力的液体发动机,推力量级分别为15.6kN和24.5kN。上升级发动机在工作时会产生强烈的羽流喷焰,而这些喷焰又会直接作用在下降级的顶部表面,因此需要进行导流和防护设计。
运载火箭和导弹武器发动机在地面发射时,通常采用圆锥导流、棱锥导流、楔形导流、双面导流和平板导流等各种形式的导流装置,“阿波罗”登月舱下降级采用的是凹碗型导流装置。载人月面起飞任务发动机的推力量级远远大于无人月面起飞用的发动机,由此造成的气动力、热影响会更加显著。需结合载人登月舱下降级的结构布局方案,合理考虑导流装置的型面选择方案,并对发动机羽流影响进行仿真分析,从而确定上升级局部结构的防护措施[7]。
3.6 月尘清除及防护技术
载人登月舱所用的发动机推力量级远远大于无人月面着陆器,由此造成月面着陆过程的月尘扰动和影响问题将更加恶劣,因此必须开展月尘清除及防护技术研究。防月尘设计技术重点解决如何消除月尘对着陆起飞全过程的各种影响问题,包括着陆时月尘飞溅对上升级及下降级敏感器的影响、航天员多次出舱过程中带来的月尘以及起飞瞬间激起的月尘影响等。
针对月尘影响,特别是对载人月面登月舱的危害,需采取一系列清除与保护技术,包括月尘清洁设备,登月舱内配备专用的除尘设备,在月面任务后对服装进行彻底清洁;登月舱面窗、仪表显示器等可采用耐磨涂层、耐磨材料等提高自身的耐磨性能,同时采用“可撕纸”等技术,利用多层薄膜粘贴在面窗表面,在出舱活动期间,航天员可根据需要一层一层撕掉;在不影响轴承活动力矩的情况下,所有气密轴承需要具有防月尘的密封结构;为敏感器和光学设备加装防护装置,为星敏感器加装防护盖,如图5示。在月面下降最终阶段、进入月尘影响范围之前,将防护盖关闭,月尘影响降低后、月面起飞前将防护盖打开。

图5 星敏感器加装防尘盖Fig.5 Star sensor w ith anti-dust cover mounted
4 结束语
载人月面着陆及起飞技术内涵非常丰富,包含关键技术环节较多,是整个载人登月工程中最具特色的飞行任务环节。本文仅分析了与载人登月舱的若干关键技术,初步调研分析了相应的技术途径和解决方法,后续研究还待深入开展。总之虽然我国载人航天和月球探测工程取得了重大突破,但是载人登月工程技术体系更复杂、技术难度更高,技术跨越更大,应提前开展核心关键技术的预先研究工作,做好技术储备。
References)
[1]龙乐豪.关于中国载人登月工程若干问题的思考[J]. 导弹与航天运载技术, 2010(6): 1-5.LONG Lehao. On Issues of China Manned Lunar Exploration[J]. Missles and Space Vehicles, 2010(6): 1-5.(in Chinese)
[2]Allan Y L. Preliminary Design of the Guidance, Navigation, and Control System of the Altair Lunar[C]. AIAA Guidance,Navigation, and Control Conference, AIAA, 2010: 1-61.
[3]Larry D, Kos. Altair Descent and Ascent Reference Trajectory Design and Initial Dispersion Analyses[C]. AIAA Guidance,Navigation, and Control Conference, AIAA, 2010: 1-11.
[4]刘昌波, 兰晓辉, 李福云. 载人登月舱下降发动机技术研究[J]. 火箭推进, 2011, 37(2): 8-13.LIU Changbo, LAN Xiaohui, LI Fuyun.Conceptual Schemes of China Lunar Excursion Module Descent Engine[J].Journal of Rocket Prosulsion, 2011, 37(2): 8-13. (in Chinese)
[5]张育林. 变推力液体火箭发动机及其控制技术[M]. 北京: 国防工业出版社, 2001.ZHANG Yulin. Variable Thrust Liquid Propellant Rocket Engine and Its Control Techniques[M]. Beijing:National Defense Industry Press, 2001.(in Chinese)
[6]刘志全, 黄传平. 月球探测器软着陆机构发展综述[J]. 中国空间科学技术, 2006(1): 33-39.LIU Zhiquan, HUANG Chuanping. Review of the Development of Soft-landing Mechanisms for Lunar Explorer[J]. Chinese Space Scienece and Technology, 2006(1): 33-39.(in Chinese)
[7]蒋万松, 黄伟. 月球着陆器着陆稳定性仿真分析[J].航天返回与遥感, 2010, 31(6): 16-22.JIANG Wansong, HUANG Wei. Simulation Analysis of Landing Stability for Lunar Lander[J]. Spacecraft Recovery & Remote Sensing, 2010, 31(6): 16-22. (in Chinese)