索控式三自由度上肢康复训练机器人①
2013-09-23简卓易金花顾余辉喻洪流
简卓,易金花,顾余辉,喻洪流
据统计,我国每年发生脑卒中患者达200万,发病率达1.2‰。脑卒中现患者700万,其中450万患者不同程度丧失劳动力和生活不能自理,致残率高达75%;偏瘫、行走能力丧失是最主要的后遗症。科学的康复训练对脑卒中偏瘫患者的肢体功能康复起着重要的作用[1-3]。目前,研究者将机器人技术应用于康复领域,提高康复训练的效率[4-8],降低患者以及临床医护人员的负担。同时,机器人用于康复训练还可以客观准确地记录训练数据,提供有效的康复评价手段[9],加之其更全面、更吸引人的三维训练模式,都有利于患者顺利康复。
目前,国内外上肢康复训练装置多数只能对上肢提供水平面内的训练模式。平面运动型的上肢康复训练机械装置无法对患者肩关节的旋转、曲伸功能进行训练,康复效果不理想。少数具有三维空间运动功能的电动上肢康复训练机械装置多数将关节驱动电机安装在对应的上肢关节处,增加了使用者视野范围内设备的体积,不仅增加了使用者的心理压力,而且增大了电机噪音[10-11]与电机辐射[12-13]对使用者的不良影响。本研究设计了一种具有三维空间运动能力,体积小巧,能够减小电机噪音、辐射等不良影响的上肢功能障碍康复训练装置。
1 机械与控制系统设计
1.1 设计要求 本研究设计的是一种能够带动使用者在三维空间内进行康复运动的索控式上肢功能训练装置,要求实现肘关节1个自由度、肩关节2个自由度运动。基于人体生物力学的基础[14-16],本装置设定肘关节1个自由度,其屈、伸范围为20°~190°;肩关节2个自由度可以完成3项运动:①收、展运动,其范围为45°~210°;②肩关节外展90°时完成屈、伸运动,其范围为45°~170°;③肩关节外展180°时完成肩关节旋转运动,其范围是40°~70°。上述运动的组合能基本满足康复训练需求。
1.2 机械结构设计 总体设计是使用一种索控式驱动方案。使用集中安装在设备底座的驱动电机作为动力输出装置,利用磁粉离合器作为动力级别调控装置,由钢丝绳索将动力传递,并通过导向轮的布局设计来引导钢丝绳索走向,最终将动力按设计要求输出到上肢的肘关节与肩关节处,完成所需的三自由度运动。由于复杂的电机、减速箱等动力提供装置和控制系统都安装在设备底座上,能够很好地在控制机械臂体积的同时留出较大的空间对这些高噪声、高辐射的系统进行屏蔽处理。
根据各关节运动要求,使用3根首尾相连的钢丝绳索(图1),将驱动电机输出的动力传出,并通过传输路径上的导向轮引导动力传递方向,最终将动力传递至与各关节处的大滚轮。在大滚轮上有螺纹导向槽,用于增加摩擦力,使驱动电机通过钢丝绳能够带动大滚轮转动,从而实现肘关节曲、伸,肩关节的收、展和肩关节前曲、后伸运动。
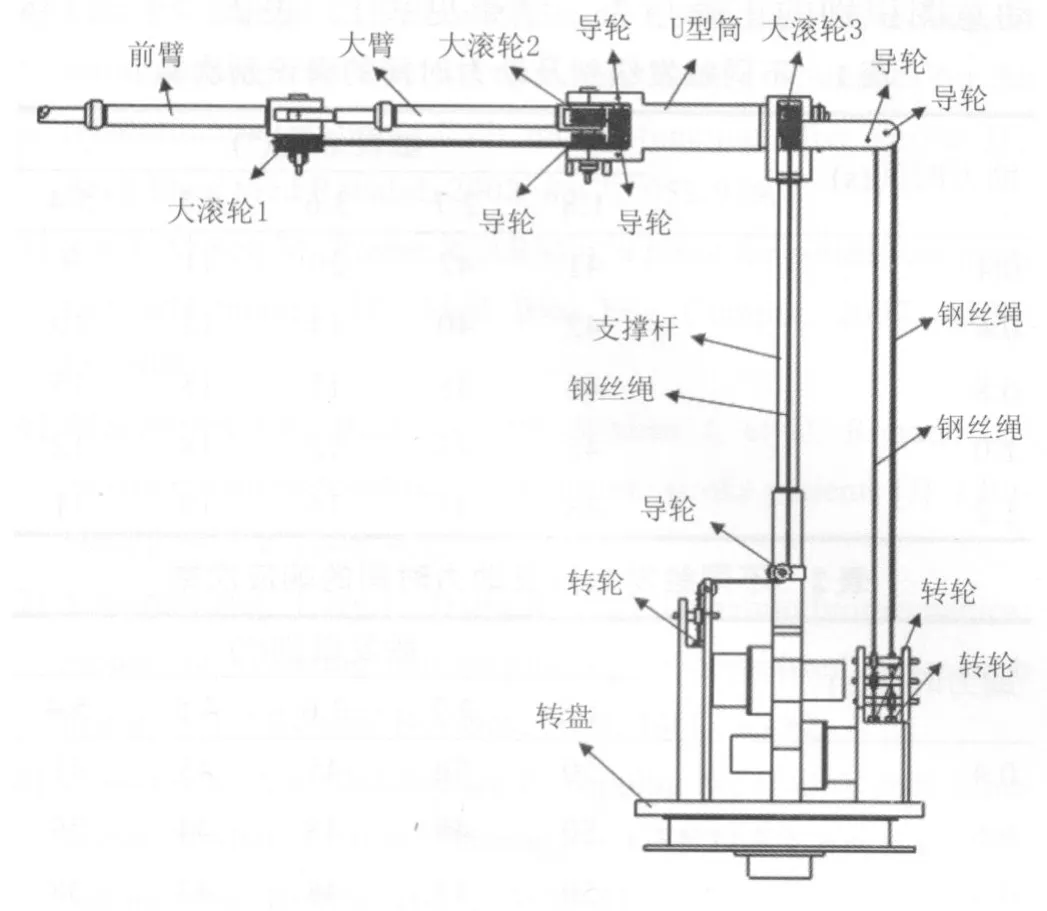
图1 动力传动图
1.3 控制系统设计 驱动控制系统使用NXP公司LPC1766作为MCU。LPC1766拥有丰富的外设,包括UART、SPI、MOTORPWM、RIT、TIMER等各种常用外设,能够满足上肢康复机器人的控制需求(图2)。本文设计的上肢康复机器人控制较为复杂,主要是针对3个角度角速度传感模块、3台磁粉离合器、3台步进电机的实时协调控制。驱动控制系统结构如图2所示。驱动控制系统使用LPC1766的UART模块与PC主控机的上位机程序进行通讯,接收控制命令,反馈运行数据;同时使用LPC1766中的MotorPWM模块产生方波提供给THB6064AH步进电机驱动器,其中方波脉冲频率决定步进电机速度,方波脉冲数决定步进量;采用增量式光电编码器对关节运动的角速度、角位移信息进行采集、计算,得到的反馈信息一方面用于使用者运动意图判断,一方面用于修正控制参数。另外还使用LPC1766的PWM模块产生占空比可调的PWM波来控制磁粉离合器驱动模块输出0~24 V可调的直流电压,从而控制磁粉离合器输出的力矩。
驱动控制系统采用7段S曲线法对步进电机加减速控制[21-22]。7段曲线算法的加速度和速度曲线平滑连续,能够保证步进电机在变速过程中速度和加速度能够均匀变化,有利于减小冲击,提高步进电机运动的平稳性。
角度角速度传感模块使用1000线增量式光电编码器,并采取2倍频采集算法对光电编码器进行数据采集、计算以提高其分辨率,在增量式光电编码器发出的脉冲的A下相或B相的上、下沿都进行计数,这样相当于编码器转过360°会产生2000个计数信号,所以分辨率提高了。
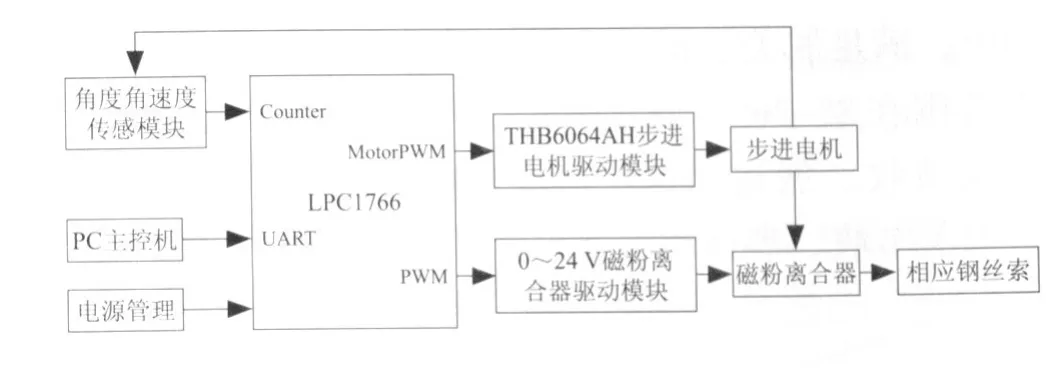
图2 驱动控制系统结构框图
2 系统仿真实验
利用运动分析软件检验机械装置是否能完成一些设定的康复训练动作,确定关节活动范围是否满足设计要求,能否适应后期研究中将要增加的虚拟现实功能,实现对使用者的有效康复训练[17-18]。运动分析软件采用SolidWorks中的Motion仿真分析模块[19-20],该模块功能强大,可以对角位移、角速度、角加速度等参数进行分析。
2.1 手部水平面画圆运动 利用SolidWork的Motion仿真分析模块,将手部抓握处限定为画圆运动,该运动由手部抓握处的一个虚拟旋转马达驱动,100 r/min,仿真时间5 s。仿真结束后对肘关节曲伸、肩关节收展角位移随时间变化的数据进行提取,确定是否满足设计要求。仿真结果如图3所示,其中如图3a为肘关节角位移-时间图,图3b为肩关节收、展角位移-时间图。由图中数据可知,完成水平面手部画圆动作,肘关节曲、伸范围44°~85°,满足肘关节运动范围设计;肩关节收、展角位移范围在137°~174°,满足肩关节收、展运动范围设计。

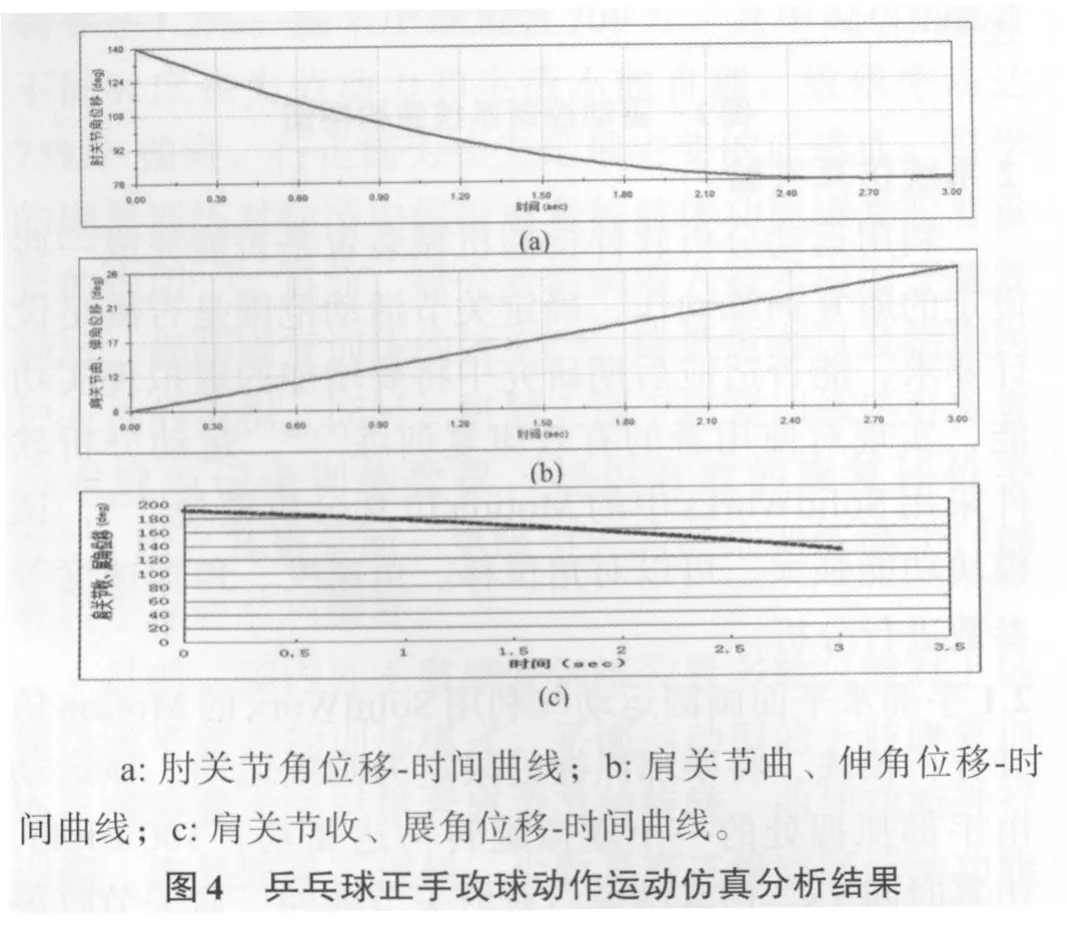
2.2 乒乓球正手攻球动作运动 将乒乓球正手攻球动作分解为肩关节曲、伸运动,肩关节收、展运动以及肘关节曲伸运动的组合进行仿真。乒乓球正手攻球动作的仿真使用3个模拟旋转马达,分别位于肘关节转轴,肩关节收、展转轴,肩关曲、伸转轴处。仿真结果如图4所示,其中图4a为肘关节角位移-时间图,图4b为肩关节曲、伸角位移-时间图,图4c为肩关节收、展角位移-时间图。由图中数据可知,完成乒乓球正手攻球动作,肘关节运动角位移范围在76°~140°,满足肘关节运动范围设计;肩关节曲、伸角位移范围在8°~26°,满足肩关节曲、伸运动范围设计;肩关节收、展运动角位移范围在120°~200°之间,满足肩关节收、展运动范围设计。
2.3 助力控制实验 助力训练是指在患者的恢复期,对患者进行主动训练时,实时探测患者的运动意图,并利用本康复训练系统同步为患者肩关节及肘关节提供适当地正向或逆向辅助动力,从而辅助患者进行随意的上肢主动训练。其中,提供正向力为助力训练,是在患者肌力不足时能帮助患者更好地完成训练动作;提供逆向力则为抗阻训练,可以加大患者训练强度。
助力触发级别与助力时间是软件中的主要调控参数。助力触发级别是指用户需要带动机械臂自主运动一定角位移来触发驱动程序的助力控制,对力弱者可以调低此参数以降低触发助力的难度,对于肌力较强者则可以调高此参数以增加触发助力的难度;助力时间是指驱动程序提供助力的持续时间。
以肩关节的助力训练为例,对样机进行测试。设置5组自主运动触发级别以及5组助力时间进行搭配控制,每组进行50次控制测试,并重复进行2遍,第1遍记录试验样机的误识别次数,第2遍记录响应次数。误识别次数是指试验样机对操作人员的运动意图判断错误的次数,响应次数指的是样机能够响应操作人员的自主运动并触发机械臂运动的次数,不区分运动意图识别的正确与否。结果见表1、表2。

表1 不同触发级别及助力时间的误识别次数

表2 不同触发级别及助力时间的响应次数
由表1可以看出,将用户自主运动的触发级别设置较高,能够得到较低的误识别率。由表2可以看出,将用户自主运动的触发级别设置较高,会导致实验样机的响应次数存在减少的趋势。而综合表1和表2,助力时间对响应次数与误识别次数并没有显著影响。在本次实验中,将用户自主运动的触发级别设置在3.6°以上均能够获得较优的响应效果且对使用者的运动意图识别准确。针对不同使用者的肌力级别,可有针对性地调节这两个参数以获得较好的助力训练效果。
3 结论
本文设计的上肢功能障碍康复训练的新型索控式机械装置经软件仿真,验证了其利用各关节运动的灵活组合,可以完成手部画圆动作、乒乓球正手攻球动作两种较复杂的康复训练动作,实现对使用者的有效康复训练。设计了驱动控制电路,并成功利用实验样机实现了肩关节的助力训练。实验结果表明,将自主运动的触发级别设置在3.6°以上时,实验样机能获得较好响应效果,并且能准确的识别使用者的运动意图。
[1]常俊玲,孙波.运动再学习对偏瘫患者上肢功能恢复的影响[J].现代康复,2000,14(5):684-685.
[2]李大年.缺血性脑血管病治疗进展[J].山东医药,2000,40(1):35-42.
[3]缪鸿石.中枢神经损伤后功能恢复理论(六)[J].中国康复理论与实践,1997,3(3):98-105.
[4]Lum PS,Burgar CG,Shor PC,et al.Robot-assisted movement training compared with conventional therapy techniques for the rehabilitation of upper-limb motor function after stroke[J].Arch Phys Med Rehabil,2002,83(7):952-959.
[5]Nef T,Mihelj M,Riener R.ARMin:a robot for patient-cooperative arlT/therapy[J].Med Biol Eng Comput,2007,45(9):887-900.
[6]Macclellan LR,Bradham DD,Whitan J,et al.Robotic upper-limb neurorehabilitation in chronic stroke patients[J].J Rehabil Res Dev,2005,42(6):717-722.
[7]Abdullah HA,Tarry C,Datta R,et al.Dynamic biomechanical model for assessing and monitoring robot-assisted upper-limb therapy[J].J Rehabil Res Dev,2007,44(1):43-62.
[8]Loureiro R,Amirabdollahian F,Topping M,et al.Upper Limb Robot Mediated Stroke Therapy-GENTLE/s Approach[J].Autonornous Robots,2003,15:35-51.
[9]Strin J.Motor recovery strategies after stroke[J].Top Stroke Rehabil,2004,11(2):12-22.
[10]陈永校.电机噪声的分析和控制[M].杭州:浙江大学出版社,1987.
[11][苏]舒波夫.沈官秋,译.电机的噪声和振动[M].北京:机械工业出版社,1980.
[12]诸自强,陈永校.电机电磁噪声的辐射声功率[J].大电机技术,1987,(1):23-27
[13]诸自强,陈永校,许大中.电机电磁振动辐射的声功率和声场分析[J].电工技术学报,1989,(1):1-6.
[14]张斌,王成祥.四肢关节活动度测量方法研究[J].刑事技术,2002,(4):5-6.
[15]康宇华,曲镭.关节活动范围研究现状[J].中国康复医学杂志,2001,(1):57-59.
[16]吴桂荣,张云然.人体关节活动范围的测量[J].航天医学与医学工程,1989,2(2):123-128.
[17]周柳,王英华,刘强.等虚拟现实技术在运动康复中的应用[J].中国组织工程研究与临床康复,2007,11(5):957-960.
[18]Goto E,Ohnishi K,Miyagawa H,et al.Field test of a force control rehabilitation system for quantitive evaluation of the disorder in the upper extremities[C].International Conference on Rehabilitation Robotics,2005:82-85.
[19]李立顺,李红勋,朱先民,等.基于Solidworks Motion的随车吊主要工作装置仿真[J].科学技术与工程,2011,(5):1070-1072.
[20]刘国彪,石兵,王兵臣,等.基于Solidworks的圆柱形搅拌器关键零部件设计分析[J].核工程研究与设计,2009,(2):106-110.
[21]杨超,张冬泉.基于S曲线的步进电机加减速控制[J].机电工程,2011,(5):813-817.
[22]张碧陶,高伟强,沈列,等.S曲线加减速控制新算法的研究[J].机床与液压,2009,(10):27-29.
