NF-6连续式跨声速风洞马赫数控制方式比较与研究
2013-09-21张永双
张永双,陈 旦,陈 娇
(1.中国空气动力研究与发展中心空气动力学国家重点实验室,四川绵阳 621000;2.总装备部驻绵阳地区军事代表室,四川绵阳 621000)
0 引言
NF-6风洞是我国第一座增压连续式跨声速风洞,风洞试验气流马赫数设计范围为0.2~1.2,洞内气压可从常压增至0.55MPa,通过增压和喷液氮降温的方法可以实现实验雷诺数达到1.5×107以上,风洞具有固定马赫数变雷诺数和固定雷诺数变马赫数的能力。风洞于2009年初完成所有性能调试与流场校测工作,主要性能指标均达到设计要求。
来流马赫数是反映风洞流场性能指标最为重要的参数之一,如何对其实现精确高效控制,更是风洞控制中一大关键难题。在国内,目前投入运行的跨声速风洞均为暂冲式风洞,其马赫数控制方式与连续式风洞有根本区别,借鉴作用有限;在国外,美国NTF、AEDC 16T,欧洲ETW风洞均为由压缩机驱动的连续式跨(超)声速风洞,但其相关资料均未披露马赫数控制的具体细节[1-6]。因而,如何确定NF-6风洞马赫数控制方式及控制流程,采用适当的控制策略,是一项开创性的工作。

图1 NF-6风洞系统原理图Fig.1 Schematic of the NF-6 wind tunnel
风洞从2007年开始进行性能调试工作,其间开展了马赫数控制的研究,结合试验数据对马赫数两种精确调节方式进行了对比与分析研究,在此基础上选定了最终的调节方式,确定了控制流程,并成功实现了马赫数的精确控制。
1 马赫数调节方式
借鉴国内2.4m风洞等经验,NF-6风洞马赫数调节分为粗调与精调两种模式,其中粗调在控制前期的预置阶段起作用,为开环模式,主要通过在一定转速阶梯中设定压缩机静叶角度实现,而精调则在预置完成后的闭环调节中进行,包括压缩机转速调节与栅指位置调节两种调节方式[7-8]。
1.1 马赫数粗调
NF-6风洞以陕鼓集团生产的AV90-2轴流压缩机为动力源,该压缩机由两级动叶和3级静叶组成,其静叶角从30°~86°连续可调。通过调整静叶角度的大小可实现压缩机入口流量的快速变化,并改变压缩机的运转效率,在压缩机转速一定的情况下,可以实现风洞试验马赫数的快速改变。
风洞运行的压缩机转速阶梯共分8级,目前实际运行的转速阶梯为6级,当栅指位置完全缩回(L=5.02mm),在不同转速阶梯下,风洞试验马赫数与压缩机静叶角度的对应关系(二元试验段)参见图2。
由图可见,在最低转速阶梯(n=880r/min)时,压缩机静叶角从30°调至80°,对应马赫数从0.12调至0.31;而在最高转速阶梯(n=2950r/min)时,压缩机静叶角从30°调至60°,对应马赫数从0.43调至1.10,而此时60°以上的静叶角范围为运行的禁区,有可能会进入压缩机喘振工况,因而不作考虑,另外,风洞还有转速3150r/min等工况。通过在不同转速阶梯下压缩机静叶角的灵活预置,可以覆盖风洞运行的全部可用马赫数范围,达到马赫数粗调的目的。
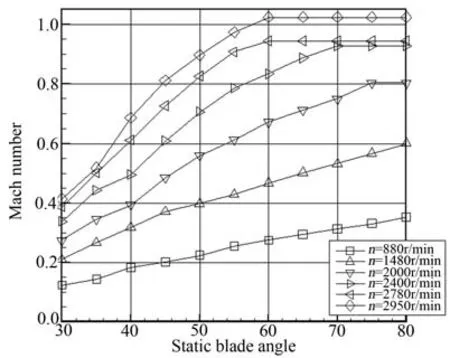
图2 各转速阶梯下压缩机静叶角与马赫数对应关系Fig.2 The relations between compressor stator vane and Mach number for various rotational speeds
然而,压缩机静叶角不能作为马赫数精确调节的手段。从图2可看出,在转速固定时,静叶角对马赫数影响明显,且随着压缩机转速的升高,其影响也更大,以n=2950r/min为例,静叶角从30°至60°对应马赫数变化范围为0.67,以近似线性特性考虑,则对于静叶角单位角度的变化,马赫数的改变量为0.022(近似值)。而对于静叶角调节机构,由于其电动执行机构的特性,角度控制的精度约为1°~1.5°,于是在该转速阶梯下,通过调节静叶角从而调节试验段马赫数的马赫数调节精度约为0.022~0.034,远远无法达到马赫数控制精度0.001~0.002的指标要求,因而压缩机静叶角无法作为马赫数精确调节的手段。
1.2 马赫数精确调节
在风洞设计时,马赫数精确调节考虑了3种调节方式,分别为压缩机转速、栅指位置与驻室抽气量调节,3种调节方式均有其适用范围与各自特点,设计的初衷是通过风洞调试找出最佳的调节方式或调节组合方式,并投入最终使用。由于风洞建设时取消了驻室抽气部分,马赫数精确调节方式即为压缩机转速调节与栅指位置调节。
两种精确调节手段的本身均具有较好特性,其中压缩机转速范围目前为0~3150r/min,转速精度为0.2%,而栅指位置范围0~227.5mm(二元试验段),定位精度0.05mm。通过压缩机转速及栅指位移均可以实现对马赫数的精确调节,但二者又具有各自不同的特点,最终采用哪种调节方式,需要对其进行详细的比较与研究。
2 两种精调方式的对比研究
2.1 调节范围
在某一设定基准运行点下(定压缩机静叶角β0与基准转速n0),压缩机转速调节范围定为n0±50r/min,在不同基准转速与基准静叶角下,通过±50r/min转速调节对马赫数的调节范围大小有所区别。而对于栅指位置,也可以结合压缩机静叶角、转速完成对马赫数在一定范围之内的调节,并且栅指位移对马赫数调节范围的大小也随由基准转速与基准静叶角所决定的基准运行点不同而不同。表1给出了在不同基准运行点下利用压缩机转速与栅指位移调节马赫数的调节范围对比。

表1 不同运行点时压缩机转速与栅指位移调节范围对比Table 1 The adjustment ranges comparison for compressor rotational speed and choke finger displacement at different operation points
表1中转速细调的数据按照可覆盖所调节马赫数范围的原则,只给出了相应范围运行点的数据,而栅指调节的数据,由于需利用栅指逼喘,因而其数据相对偏于较大静叶角、更接近喘振的工况,根据实际测试的情况,并没有给出相应运行点的所有数据,以下表2、3与之相似。从表1可以看出,栅指在其可运行的全范围(不发生喘振情况下)内调节时,对于马赫数的调节区间大于利用压缩机转速在±50r/min内对马赫数的调节区间。
2.2 调节精度
作为马赫数精调手段,压缩机转速以其最小可调节量变化时所引起的马赫数变化量反应了压缩机转速对马赫数的调节精度,与此相似,栅指位移以其最小可调节量变化时所引起的马赫数变化量反应了栅指位移对马赫数的调节精度。进一步的分析看出,调节精度还与调节瞬时所对应的基准参数如压缩机转速与静叶角有关,当压缩机处于高静叶角与高转速的高效状态时,单位调节变量所引起的马赫数变化量也相应较大。表2给出了当处于压缩机不同的转速与静叶角基准参数下,精调转速与精调栅指位移所对应的马赫数精度,此处压缩机转速的最小可调节量为1r/min,而栅指位移的最小可调节量取为0.1mm。
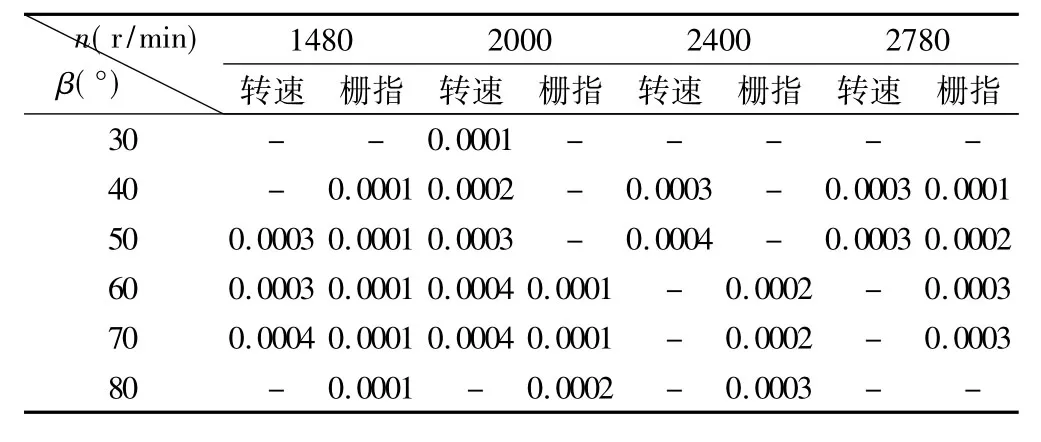
表2 不同运行点时压缩机转速与栅指位移调节精度对比Table 2 The adjustment precisions comparison for compressor rotational speed and choke finger displacement at different operation points
由表2可以看出,利用栅指对马赫数进行精调其调节精度优于利用压缩机转速进行调节的调节精度,但两种方式都远远优于ΔM≤±0.001~±0.002的指标要求。实际上,压缩机转速本身的调节精度以及栅指位移本身的定位精度均分别大于其最小调节量,对于压缩机转速,其最终定位精度可控制在5r/min以内,而栅指定位精度可控制在0.5mm以内,最终对应的细调马赫数的精度指标均可控制在ΔM≤±0.002以内。
2.3 调节速度
缩短马赫数调节的过渡过程时间,可以节省电力,提高试验效率,因而对两种调节方式的调节速度进行了对比,仍以上述基准运行点为例,表3列出了在各运行点下,马赫数变化量0.02时,两种调节方式所用的时间对比,其中压缩机转速变化率为80s内0~3800r/min,考虑到小范围精调转速时,动态调节参数的变化引起调节时间的延长,取压缩机转速变化量100r/min时对应时间为8s,而由栅指驱动电机转速(400r/min)及机械传动关系推算,栅指位移变化率取为5mm/s。

表3 不同运行点时压缩机转速与栅指位移调节速度对比Table 3 The regulating speeds comparison for compressor rotational speed and choke finger displacement at different operation points
可以看出,两种调节方式在调节速度上基本相当。在低转速运行点时,转速调节的调节速度稍快,而在高转速运行点时,则是栅指调节的调节速度更快。
2.4 安全性能
无论使用哪种方式进行马赫数精调,系统的安全性是必须首要考虑的。从以上对比中可以看出,利用转速精调马赫数,将转速限定在基准运行转速点的±50r/min范围之内,通过适当的选择基准运行点,可以确保系统的安全运行。而在利用栅指调节时,也需要对栅指的调节范围进行严格限制,避免其进入压缩机喘振区。
从实际调试过程看,当栅指处于完全缩回状态时,除去压缩机与风洞管网系统的谐振运行转速(1870r/min)及部分导致振动较大的高静叶角运行点外,在压缩机的其它运行点处,均不存在压缩机喘振及振动超标情况,风洞运行相对安全。而对于栅指参与调节运行的情况,栅指本身便作为压缩机喘振曲线测试时的逼喘手段,在二喉道截流状况下,即便在压缩机处于1000r/min低转速时,结合一定的静叶角值,压缩机仍然有可能进入喘振。因而,综合来看,利用转速精调马赫数在安全性上较栅指位移调节方式为优。
3 调节方式的确定及控制流程
风洞马赫数粗调的方式比较明确,结合压缩机静叶角与转速的不同组合,形成不同的基准运行点,可以实现二元试验段马赫数在0.2~1.02,三元马赫数在0.2~1.02之间的自由调节,能够覆盖风洞的全马赫数运行范围。马赫数调节二、三元基准运行点分布分别如图3、4所示,此可以作为马赫数预置与粗调时的参照标准。
对于马赫数精调,由以上对比分析可以看出,利用栅指位移进行调节,在调节范围、调节精度以及部分运行点的调节速度上均具有明确优势,而利用转速进行马赫数精调,则在安全性以及另外一些运行点的调节速度上性能更优。但从上述的比较过程,有几个需要注意到的事实是:

图3 马赫数调节基准运行点分布(二元)Fig.3 The operating point distribution for Mach number adjustment(two-dimensional)

图4 马赫数调节基准运行点分布(三元)Fig.4 The operating point distribution for Mach number adjustment(three-dimensional)
(1)栅指精确调节比转速±50r/min精确调节调节范围更广,但实际上通过预置与粗调阶段的调节,马赫数实际值已经接近目标值,并不需要在精调阶段进行大范围的调节;
(2)栅指精确调节精度更高,但两种精调方式的调节精度均优于设计指标要求;
(3)两种调节方式各自在特定的运行点具有调节速度优势;
(4)转速精调方式具有安全性更高的优势,且转速本身就是马赫数调节(粗调)的必要手段,引入转速进行马赫数精调,并不增加系统复杂性;而引入栅指进行马赫数精调,相当于增加一个控制参量,必然增加控制算法及控制程序编写的复杂性。
基于上述4点,选定了利用转速精调马赫数的控制方式,并确定控制流程如下:(1)根据马赫数与压缩机转速及静叶角的对应关系曲线,查出设定马赫数下的最佳转速及静叶角;(2)根据上述转速数据,进行压缩机转速预置;(3)转速预置到位后,对压缩机静叶角进行预置;(4)转速与静叶角均到设定的预置值以后,观察当前的马赫数与目标值之间的偏差,若偏差较大,则需对预置值进行微调,并重新预置,直到当前马赫数示值与目标值之差达到指定的误差范围;(5)系统进入闭环调节,利用压缩机转速进行马赫数精调;(6)当马赫数稳定,发采集指令,测量系统采集数据;(7)改变目标马赫数时,重复以上步骤。当静叶角已经处于某一个较大的角度并且转速要进行大范围的调整,需先将静叶角退回初始角度,以免直接上转速使得运转点逼近喘振点,当转速达到设定值以后,再改变静叶角到指定值;(8)设定转速及静叶角变化均呈阶梯方式逐步改变,转速分步阶梯为200r/min,当临近1870r/min的共振点时,呈跨越式跳变,该变化阶梯设定为400r/min;静叶角阶梯为3°或2°;(9)风洞停车时,先将静叶角分阶梯退至初始角度(30°),再分阶梯降转速。当风洞长时间运行、轴承发热量大时,需盘车运行,降低温度。
4 结论与展望
NF-6风洞于2008年完成了控制系统的全部调试工作,其中马赫数控制系统的主要指标为:马赫数运行范围分别为二元0.2~1.16,三元0.2~1.1;马赫数闭环控制精度优于±0.002。图5、图6分别给出了二元试验段某车次设定马赫数0.3和1.0时马赫数控制精度的情况,可以看出其控制精度均优于±0.002,且在高马赫数时控制精度较低马赫数时更高。

图5 Ma=0.3控制曲线Fig.5 The control curve when Ma=0.3
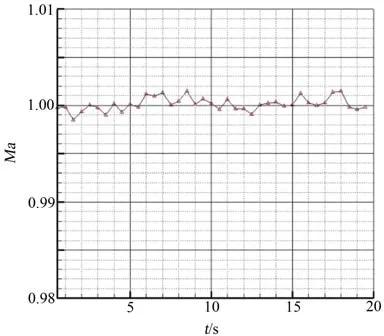
图6 Ma=1.0控制曲线Fig.6 The control curve when Ma=1.0
风洞马赫数控制系统通过对比分析与试验验证,采用了用压缩机转速精调马赫数的控制方式,但是也可以看出,栅指调节在调节范围、调节精度以及部分运行点的调节速度上是具有一定优势的,在确保系统运行安全的情况下,也可以作为精调马赫数的一种有效手段。
[1] CRAWFORD B L,SPELLS C.Increasing efficiency at the NTF by optimizing model AoA positioning[R].AIAA 2006-1314,2006.
[2] PETERSW L,LAWRENCE W R,MILLS M L,et al.Milam cycle time reduction strategies and improvements in transonic testing in the AEDC Wind Tunnel 16T[R].AIAA 99-0179,1999.
[3] STICH P,ROSE D,ROLLINS D.Expected productivity benefits resulting from the new data acquisition,processing and control system for tunnel 16T at AEDC[R].AIAA 98-32777,1998.
[4] MUERLE D C.The development and evolution of a remote wind tunnel control room at eglin AFB[R].AIAA 2007-1634,2007.
[5] ROSARIO R A,STEINLE F W Jr.Neural network application for optimizing multi-stage wind tunnel compressor efficiency[R].AIAA 2002-0308,2002.
[6] GOBERT J L.ETW control system:design and first results[R].AIAA 94-2514,1994.
[7] 张永双,康虎.NF-6风洞控制系统[C]//中国空气动力学会测控技术专业委员会第五届五次学术会议论文集,2009:394-401.
[8] 郝礼书,乔志德,张永双,等.NF-6风洞马赫数闭环控制系统设计研究[J].实验流体力学,2010,24(4):85-88.
