一种基于ARKF的地下工程沉降变形预测算法
2013-09-17潘国荣周跃寅
郭 巍 潘国荣,2 周跃寅
(1同济大学测绘与地理信息学院,上海 200092)(2同济大学现代工程测量国家测绘地理信息局重点实验室,上海 200092)
一种基于ARKF的地下工程沉降变形预测算法
郭 巍1潘国荣1,2周跃寅1
(1同济大学测绘与地理信息学院,上海 200092)
(2同济大学现代工程测量国家测绘地理信息局重点实验室,上海 200092)
摘 要:针对地下工程沉降变形预测中测量数据可能含有有色噪声甚至粗差的问题,基于抗差Kalman滤波理论提出一种自适应的沉降变形预测算法.以水准观测沉降量、沉降速度和加速度作为状态向量,通过构造自适应因子和等价权函数来处理系统模型误差和观测粗差对变形预测结果的影响,避免了岩土工程中本构关系和力学参数不易确定的问题,便于实现应用.采用上海某隧道沉降监测数据对该算法进行验证实验,结果表明该算法能较好地对变形监测点进行一步预测,并对系统模型误差和观测粗差具有较好的适应性和容错性,取得了良好的工程实验效果,适合测量环境复杂的地下工程沉降变形预测应用.
关键词:地下工程;变形预测;自适应抗差滤波;粗差探测
地下工程安全问题越来越多的影响着工业生产、城市生活,对其结构安全性的监测及预报对于提高井下采矿、隧道交通等地下工程设计施工技术水平、保障地下工程运营安全、预防由于地下工程而引起的环境问题具有重要的理论研究价值和社会意义,文献[1-2]分别对水电站地下洞穴稳定性评估和隧道挤压变形预测进行了研究.关于变形预测研究,专家学者提出了很多模型或方法,主要包括时间序列分析法、灰色系统、人工神经网络、遗传算法、支持向量机、卡尔曼滤波[3]和尖顶突变等,这些预测模型或方法各有其优缺点和适用性.针对不同应用中数据特点,改进模型和方法被相继提出,文献[4]采用启发式算法和支持向量机对地下开采岩石崩塌长期预测进行了研究,文献[5-7]中分别利用卡尔曼滤波方法对水电边坡变形预测和大型深凹露天矿边坡变形预测进行了研究.抗差Kalman滤波理论因其有效处理有色噪声的特性[8-9],越来越多的被用于数据处理定位跟踪领域.文献[10]基于自适应抗差Kalman滤波理论提出了一种无线传感器网络节点跟踪算法.文献[11]用其来研究GPS导航算法.
对于地下变形预测问题,由于其环境复杂,不利于测量作业开展,于是隧道等地下工程多采用支导线测量法,随测站的增加会产生误差积累,导致测量数据的精度受到较大影响,甚至含有粗差,而测量数据的精确度对预测结果的可靠性有着很大的影响,因此在进行预测计算时模型误差应根据不同测点位置灵活设置.针对该问题本文基于抗差Kalman滤波理论提出一种适合地下工程沉降变形的自适应的变形预测算法.该算法通过构造自适应因子和等价权函数来处理模型误差和观测粗差对变形预测结果的影响,来提高预测的可靠性.
1 抗差自适应Kalman Filter预测算法
1.1 Kalman 滤波原理
Kalman滤波理论要求动态系统模型噪声Wt和观测噪声et的方差阵ΣWt和Σet均为已知或接近于实际值.然而在实际应用中,由于测量设备、测量环境及测量操作等原因,观测模型和动力学系统模型误差方程一般都是非线性的,而且可能存在大量观测异常,以此作为观测量进行滤波计算必然导致状态参数滤波值的失真,降低了预测结果的可靠性.于是需要在滤波过程中根据抗差估计理论构造等价权矩阵来抵制测量粗差的影响,并通过自适应因子整体调节状态噪声协方差阵以降低系统模型误差对预测结果的影响.
动态跟踪系统状态空间模型[3,9]被描述为



式中,Wt,Wt-t为有色状态噪声;et,et-1为有色观测噪声;Ht,t-1,ψt,t-1分别为有色状态噪声和有色观测噪声模型的系数矩阵;ξt,ηt为统计特性已知的零均值高斯白噪声序列.
2.2 基于ARKF的沉降变形预测算法
以监测点沉降位移、沉降速度和加速度为状态向量,记为Xt=[d v a]T,以监测点沉降量观测值作为观测向量,记为Lt.设状态预测信息向量误差方程为

观测向量误差方程为

设状态预测向量 ^Xt的协方差阵为Σ^Xt,观测向量Lt的协方差阵为Σet,为控制观测异常和状态预测信息异常对状态参数估值的影响,构造极值原则:

解得自适应抗差Kalman滤波解向量为

式中为Lt的抗差等价权,它是观测向量权矩阵的自适应估值;αt是自适应因子;σ20为比例因子.
此时,若观测信息有异常,则相应的等价权矩阵元素减小,从而控制观测异常对状态参数估值的影响;若动力学模型产生异常,相应的自适应因子减小,控制其影响.
不仅可以利用自适应因子控制状态扰动异常和有色噪声的影响,而且还能利用等价权降低观测异常的影响.


自适应因子αt的选取与滤波解的形式有关,对于递推滤波解,αt不能等于0,故不应构造为归零函数.自适应因子的选取海域学习因子有关,合适的学习因子应能可靠地判别动力学模型预报信息与真值间的差异.现构造两段段函数自适应因子如下:



3 工程实验
为验证本文自适应抗差滤波预测算法在地下工程沉降预测应用方面的可行性,选择上海市大连路东线隧道某段6个点水准监测点2004-3-21至2004-4-23时隔34天、共17次沉降监测数据(每两天测量1次)作为处理对象进行算法实验计算分析.6个水准监测点17次原始沉降观测值如图1所示.通过ARKF算法对观测数据进行一步预测,获其一步滤波预测值(见图2)以及各监测点沉降变形速度和加速度,如图3和图4所示.

图1 水准监测点17次沉降观测值曲线图
由图1不难看出,各监测点的第13天观测数据和前后数据相比都存在一个约1.5 mm左右的波动,而且方向一致,可能是水准起算点误差或仪器系统误差所致.另外可知这6个点属于同一个沉降地段,因为相邻且具有相同的变化趋势和相近的变化量.
由图2与图1比较可知,监测数据经过滤波预测后,数据曲线变得较为平滑,特别是第13和第25天的数据波动,因为ARKF滤波预测将其作为粗差处理,使其对状态预测参数的影响被大大削弱.
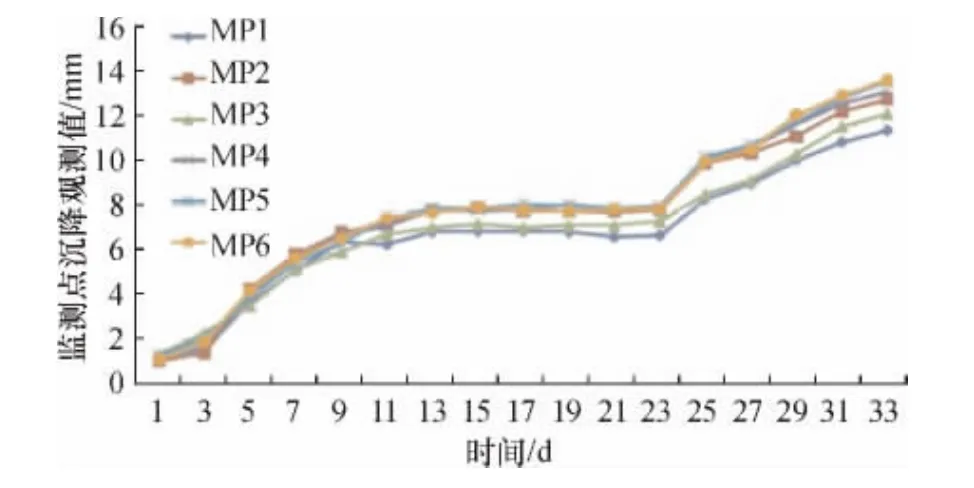
图2 水准监测点沉降量一步滤波预测值曲线图
由图3和图4可知,监测点沉降变形经历了先加速、再减速、再平稳的过程,符合地质沉降的特点.为直观的分析ARKF预测的效果,现取MP1监测点的观测数据与普通Kalman滤波和ARKF的一步预测数据进行对比分析,如图5所示.其数据列表如表1所示.
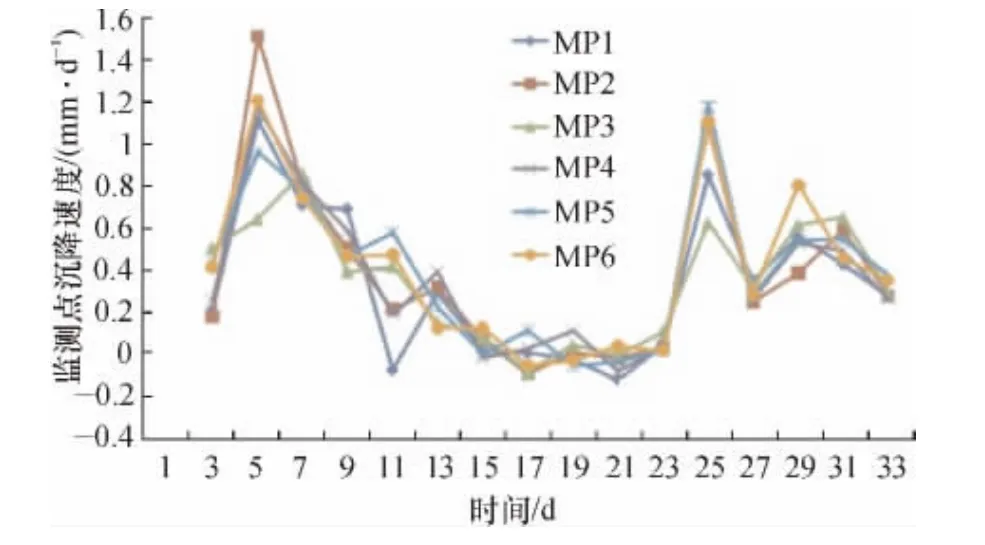
图3 水准监测点沉降速度变化曲线

图4 水准监测点沉降加速度变化曲线

图5 MP1监测点观测值与KF/ARKF一步滤波预测值的比较图
由图5和表1可明显的看出,ARKF预测对观测值的异常有较好的抑制作用,相比KF可获得较好地预测精度,削弱异常值对随后预测的影响,使连续的沉降观测数据趋于平滑,更符合实际的岩土变形特征.
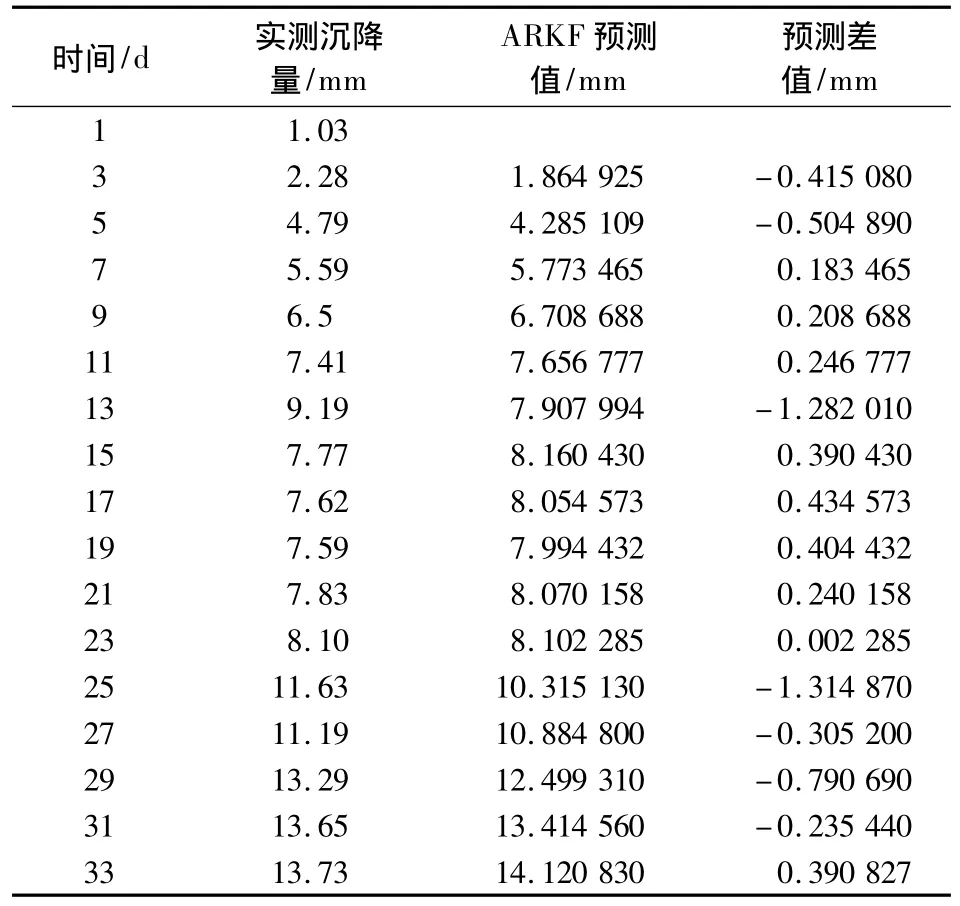
表1 监测点MP1实测沉降量与ARKF一步预测值比较
4 结论
1)在沉降变形预测中考虑系统模型误差和测量粗差的影响,引入抗差自适应Kalman滤波预测理论,通过构造自适应因子和等加权来削弱模型误差和测量粗差对预测值的影响;
2)实验结果表明本文算法对未知噪声和观测异常有较强的适应性和容错性,对变形监测点的有较好的预测效果,适合测量环境复杂的地下工程;
3)该算法直接对测量数据进行处理,获取一步沉降预测值、速度和加速度,未涉及到具体的本构关系和结构力学参数,回避了岩土工程中本构关系和参数不好确定的问题.测量误差差异可作为外部条件影响滤波解算.需根据不同应用(如矿井围岩、隧道贯通、地铁维护)设置不同的影响因子和影响方法;
4)地下工程变形预测问题受工程环境影响大,是个复杂的多学科问题,如何建立简化的预测模型,较好的满足不同环境的应用需要是有待进一步深入研究的问题.
[1]Zhu W S,Li X J,Zhang Q B,et al.A study on sidewall displacement prediction and stability evaluations for large underground power station caverns[J].International Journal of Rock Mechanics & Mining Sciences,2010,47(7):1055-1062.
[2]Dwivedi R D,Singh M,Viladkar M N,et al.Prediction of tunnel deformation in squeezing grounds[J].Engineering Geology,2013(161):55-64.
[3]杨元喜.动态定位自适应滤波解的性质[J].测绘学报,2003,32(3):189-192.
Yang Yuanxi.Properties of the adaptive filtering for Kinematic positioning[J].Acta Geodaetica Et Cartographica Sinica,2003,32(3):189-192.(in Chinese)
[4]Zhou J,Li X B,Shi X Z.Long-term prediction model of rockburst in underground openings using heuristic algorithms and support vector machines[J].Safety Science,2012(50):629-644.
[5]何秀凤,贾东振,乐洋.基于卡尔曼滤波方法的高边坡变形分析与预测[J].水电自动化与大坝监测,2009,33(2):48-50.
He Xiufeng,Jia Dongzhen,Le Yang.Analysis and estimation of steep slope deformations using kalman filter[J].Hydropower Automation and Dam Monitoring,2009,33(2):48-50.(in Chinese)
[6]陆付民,王尚庆,李劲.离散卡尔曼滤波法在滑坡变形预测中的应用[J].水利水电科技进展,2009,29(4):6-9.
Lu Fumin,Wang Shangqing,Li Jin.Application of discrete Kalman filter method in landslide deformation forecast[J].Advances in Science and Technology of Water Resources,2009,29(4):6-9.(in Chinese)
[7]李长洪,范丽萍,张吉良,等.卡尔曼滤波在大型深凹露天矿边坡变形监测预测中的应用[J].北京科技大学学报,2010,32(1):8-13.
Li Changhong,Fan Liping,Zhang Jiliang,et al.Application of Kalman filtering to high and steep slope deformation monitoring prediction of open-pit mines[J].Journal of University of Science and Technology Beijing,2010,32(1):8-13.(in Chinese)
[8]崔先强,杨元喜,高为广.多种有色噪声自适应滤波算法的比较[J].武汉大学学报:信息科学版,2006,31(8):731-735.
Cui Xianqiang,Yang Yuanxi,Gao Weiguang.Comparison of adaptive filter arithmetics in controlling influence of colored noises[J].Geomatics and Information Science of Wuhan University,2006,31(8):731-735.(in Chinese)
[9]Yang Y X,He H B,Xu G C.Adaptively robust filtering for kinematic geodetic positioning[J].Journal of Geodesy,2001,75(2/3):109-116.
[10]田丰,郭巍,刘晓露,等.基于自适应抗差滤波的WSNs节点跟踪算法[J].传感技术学报,2011,24(1):100-105.
Tian Feng,Guo Wei,Liu Xiaolu,et al.Tracking algorithm based on adaptively robust filtering for WSNs[J].Chinese Journal of Sensors and Actuators,2011,24(1):100-105.(in Chinese)
[11]张双成,杨元喜,张勤.一种基于抗差自校正Kalman滤波的GPS导航算法[J].武汉大学学报:信息科学版,2005,30(10):881-884.
Zhang Shuangcheng,Yang Yuanxi,Zhang Qin.An algorithm of GPS navigation based on robust self-tuning Kalman filtering[J].Geomatics and Information Science of Wuhan University,2005,30(10):881-884.(in Chinese)
Settlement deformation prediction algorithm based on adaptive robust Kalman filtering for underground engineering
Guo Wei1Pan Guorong1,2Zhou Yueyin1
(1College of Surveying and Geo-Informatics,Tongji University,Shanghai 200092,China)
(2Key Laboratory of Modern Engineering Surveying,National Administration of Surveying,Mapping and Geoinformation,Tongji University,Shanghai 200092,China)
Abstract:Aiming at the problem of settlement observation data containing colored noise even gross errors in underground engineering,a prediction algorithm of settlement is presented based on the adaptive robust Kalman filtering theory.Taking the value,velocity and acceleration of leveling settlement as the state vector,the effects of system model error and measurement gross error on prediction are controlled by constructing self-adaptive factor and equivalent weight function.In addition,this algorithm is simple to implement,which avoids the problem of constitutive relations and the mechanical parameters of geotechnical engineering that are not easy to be determined.The settlement observation data of the tunnels in Shanghai is used for the experiment to verify the proposed algorithm.The results show that the algorithm can effectively obtain deformation predication,and it has the advantages of good adaptability and fault tolerance for system model error and measurement gross error.The algorithm obtains good application effect in engineering,and it is suitable for the settlement prediction of underground engineering in complex measuring environments.
Key words:underground engineering;deformation prediction;adaptive robust filtering;gross error detection
中图分类号:P642
A
1001-0505(2013)S2-0347-04
doi:10.3969/j.issn.1001 -0505.2013.S2.028
收稿日期:2013-08-10.
郭巍(1981—),男,博士生;潘国荣(联系人),男,博士,教授,博士生导师,pgr2@163.com.
基金项目:国家教育部高等学校博士学科点专项科研基金资助项目(20120072110049).
引文格式:郭巍,潘国荣,周跃寅.一种基于ARKF的地下工程沉降变形预测算法[J].东南大学学报:自然科学版,2013,43(S2):347-350.[doi:10.3969/j.issn.1001 -0505.2013.S2.028]
