Slip Detection of Robotic Hand Based on Vibration Power of Pressure Center
2013-09-16XiaoYouZhangRongQiangLiu
Xiao-You Zhang,Rong-Qiang Liu
(1.Dept.of Mechanical Engineering,Nippon Institute of Technology,Saitama 345-8501,Japan;2.Dept.of Mechanical Engineering,Harbin Institute of Technology,Harbin 150001,China)
1 Introduction
Robots are expected to support human activities in office or at home,as well as factories.For robots,in order to achieve the same level of precision in manual operations which humans achieve,many researchers are working on highly versatile,multi-fingered robotic hands which offer a high number of Degree of Freedoms(DOFs)[1-3].Two tasks for versatile hands are related to general-purpose grasping and sensing of complex objects.Firstly,like human hands,robotic hands can firmly grasp objects because of their large number of DOFs.Secondly,robotic hands can be used as complex sensors to detect the detailed information about object features which are not obtainable by other means[4].
In order to achieve safe grasping of objects of unknown weight without damaging or dropping,robotic hands should sense the pressure distribution of the contact surface between the fingers and the grasped object,and adjust the grasping force accordingly[5-7].Therefore,it is necessary to detect incipient slip between the robotic hand and the grasped object[8-9].
In recent years,several research groups have proposed the methods for slip detection.Tremblay et al.[10]demonstrated the effectiveness of incipient slip detection by using the peripheral slip signal from an accelerometer mounted on a curved soft surface.In their setup,only one sensor is attached to the fingertip,so they cannot pinpoint the location of the slip.Francomano et al.[11]proposed a slip sensor with nomoving parts,based on thermo-electrical phenomena,fabricated on a flexible substrate and suitable for integration on curved surfaces,such as robotic finger pads.Using this slip sensor,the slip velocity can be detected,but the location of the slip still cannot be pinpointed.
Jockusch et al.[12]proposed a tactile sensor for position detection in their hydraulic three-fingered hand.The sensor combined a resistive sensor and a piezoelectric PVDF film for slip detection.Damian et al.[13]proposed an artificial ridged skin that encodes,through its morphology,the slip detection and slip speed for a robotic hand.Such encoding of the slip signal is suitable for relaying tactile user feedback in prosthetic applications.
Tsutsumi et al.[14]developed a flexible,thin and lightweight slip detection sensor utilizing the characteristics of pressure-sensitive conductive rubber.This was achieved by using the high-frequency vibration component generated in the process of slipping of the gripped object.Kawamura et al.[15]demonstrated a hybrid tactile sensor system for a robotic hand to hold and grip an object adaptively.The hybrid tact ile sensor system consists of a Carbon Micro Coil(CMC)touch sensor and a force sensor.The CMC sensor element is made of silicon rubber containing CMCs of several micrometers in diameter.However,because the rubber lacks homogeneity and has large hysteresis,the precision of the slip detection is limited by using above sensors.
In this paper,we proposed an incipient slip detection method based on the vibration power of the pressure center.Firstly,the stick-slip vibration component of the pressure center generated the slip of the grasped object was measured by using an array-type pressure sensor.Then,the vibration power of the pressure center was calculated by using the measured vibration component,and was used as a slip-detection function to judge the incipient slip of the grasped object.Finally,a weight coefficient is experimentally identified and used in the slip-detection function.Additionally,the proposed slip detection method is experimentally verified.
2 Principle of Slip Detection
2.1 Pressure Center of the Contact Plane
Fig.1 shows a configuration of the four-fingered robotic hand with an array-type pressure sensor.The array-type pressure sensor is planted into the soft skin of fingertips,finger cushions,thenar,and palm respectively.The pressure sensor consists of many cells,and each cell can detect pressure change in a direction perpendicular to the contact surface of the grasped object.Therefore,the array-type pressure sensor can detect the distribution of the pressure center of the contact plane,between the finger and the grasped object,and measure the stick-slip vibration component of the pressure center generated upon slip of the grasped object.

Fig.1 Configuration of four-fingered robotic hand with array-type pressure sensor
Fig.2 shows a sketch map of a fingertip with the array-type pressure sensor and a definition of the pressure sensor cells.On the XOY plane,the pressure center of the contact plane,Oc,is given by Eq.(1).

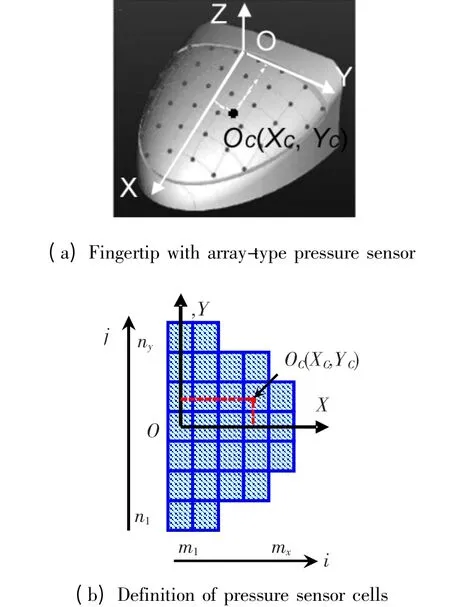
Fig.2 Sketch map of fingertip with array-type pressure sensor and definition of pressure sensor cells
Here,Xcand Ycare the positions of the pressure center in the X and the Y directions,respectively,and are expressed by Eq.(2).

where i and j are the serial numbers of each cell in the X and the Y directions without dimension,as shown in Fig.2,and v(i,j)is the output voltage of cell(i,j).
In this paper,the LSTM unit contains peephole connections to fully utilize the presentation of memory cell.The transition functions of LSTM are shown as Eqs.(3)–(8).
2.2 Slip-Detection Function
To judge the incipient slip of the grasped object,a slip-detection function is proposed and is given by Eq.(3).

Here,n is an averaged sampling number and k is a constant.In the slip-detection function,the vibration power of the pressure center and multiple-sample averaging are used to reduce the influence of measurement noise.
In this research,the pressure sensor contains many cells,and each cell is a capacitive pressure sensor element.As the load on the pressure sensor increases,the capacitance increases and the output voltage also increases.On the contrary,when the incipient slip occurs between the finger and the grasped object,the average of the pressure center’s vibration power decreases gradually,as shown in Fig.3.

Fig.3 Output of pressure sensor and average of vibration power for different loads
Because the vibration power of the pressure center differs for different loads applied to the pressure sensor,the same threshold value cannot be used to judge incipient slip for different loads.In order to be able to use the same threshold value,a weight coefficient G is used in the slip-detection function.The weight coefficient is experimentally determined,as shown in Eq.(4).

Here,vais the sum output of the pressure sensor’s cells,as given by Eq.(5).

3 Experimental Setup for Slip Detection
Fig.4 shows a photograph of the robotic hand with the pressure sensor installed.The robotic hand is designed as a four-fingered mechanical structure,and it has 13 DOFs.Its mass is 2.3 kg,and the length of the hand and the width of the palm are 258 mm and 119 mm,respectively.Fig.5 shows a photograph of the array-type pressure sensor(Pressure profile systems Inc.).The pressure sensor is custom-made in accordance with the developed robotic hand,and it was planted into the soft skin of fingertips,finger cushions,and thenar,respectively.
Fig.6 shows the experimental setup for detecting slip of the grasped object.The fingertip equipped with the pressure sensor is fixed on the bracket at a certain tilt angle.The grasped object is fixed on the electronic balance,which is used to measure the load applied on the fingertip.The electronic balance is fixed on the slider,which is driven by a DC motor whose speed can be arbitrarily set.The slip of the grasped object is represented by the motion of the slider.The load applied on the fingertip,which simulates the grasping force of the robotic hand,can be changed by altering the weight on the tray.The output of the pressure sensor is recorded by the computer.

Fig.4 Photograph of robotic hand

Fig.5 Photograph of array-type pressure sensor

Fig.6 Experimental setup for slip detection
4 Experiments on Slip Detection
4.1 Effect of Motor on Pressure Sensor
When the load of the pressure sensor on the fingertip was zero,the outputs of the pressure sensor were measured with the motor powered off and with the motor running at 10 r/min.Fig.7 shows the calculated pressure center and the results of the Fast Fourier Transform(FFT)analysis.It can be seen that the amplitude of the pressure center is almost the same in these two states,indicating that the motion of the motor does not significantly affect the pressure sensor.
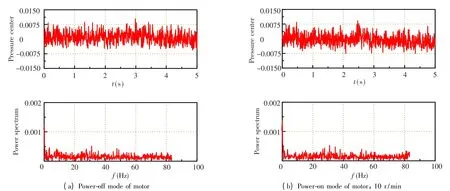
Fig.7 Impact to pressure sensor from motor
4.2 Slip Detection Experiments
To extract the stick-slip vibration component from the signal of the pressure sensor,a Low Pass Filter(LPF)and a High Pass Filter(HPF)were used.The cutoff frequencies of the LPF and the HPF were set to 50 Hz and 1.0 Hz,respectively.In the slip-detection function,the averaged sampling number n was set to 20,and the constant k was set to 3.0×10-4by experiments to judge the incipient slip by using the same threshold value of 0.5.
Firstly,a stainless steel object was used for the slip detection experiments.The motion speed of the slider,which simulates the slipping speed of the grasped object,was set to 0.17 mm/s.The load on the fingertip pressure sensor was successively set to 150 g,300 g,and 500 g.The motor was powered on about 30 s after the start of the experiments.The results of slip detection are shown in Fig.8.
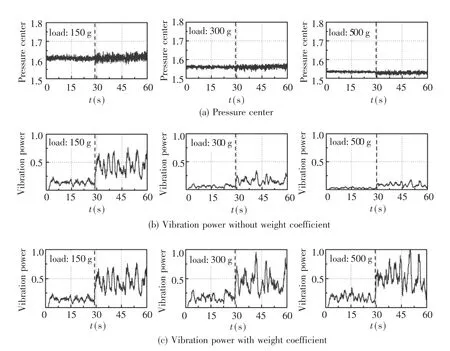
Fig.8 Slip detection results
From the results of the experiments,it can be seen that,after incipient slip takes place,the vibration of the pressure center becomes more intense and the vibration power becomes stronger.However,as the load increases,the average of the pressure center and the vibration power decrease.In this situation,the same threshold value cannot be used to judge incipient slip.However,when the weight coefficient G is used to the slip-detection function,the calculated vibration power is the same,and the incipient slip can be judged using a fixed threshold value of 0.5.The experiment was performed 5 times under the same condition,yielding consistent results.This confirms that our method of slip detection is repeatable.
Secondly,using a stainless steel object and an applied load of 150 g,the slipping speed was set to 0.5 mm/s and 1.0 mm/s,respectively.The results of slip detection are shown in Fig.9.The results confirm that the incipient slip can be judged at different slipping speeds by using a constant threshold value of 0.5.
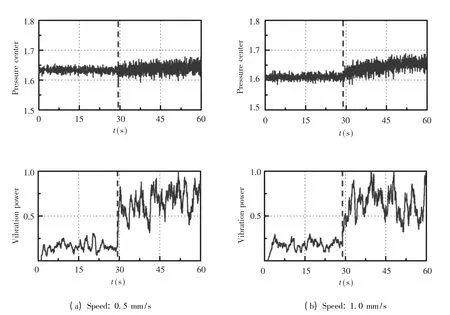
Fig.9 Experiment results at different slipping speeds
Finally,the objects of different materials such as glass,plastic,cloth,and paper,were used.The load was set to 150 g and the slipping speed was set to 0.5 mm/s.The vibration power of the pressure center for each case is shown in Fig.10.In each case,the vibration power increases substantially after incipient slip,and incipient slip can be accurately judged by using a threshold value of 0.5.The above mentioned experimental results demonstrated that incipient slip can be detected by the proposed slip-detection function with the same threshold value for various materials,different slipping speeds grasping forces.
5 Conclusions
In this paper,an incipient slip detection method based on the vibration power of the pressure center was proposed.In order to judge incipient slip by using the same threshold value for different grasping forces,a slip-detection function containing a weight coefficient was proposed.Moreover,the effectiveness of the proposed slip detection method was experimentally verified,and it was shown that incipient slip can be judged using the same threshold value for different types of objects,different slipping speeds,and different grasping forces.In addition,multiple iterations of experiment have demonstrated the desirable repeatability of the proposed slip detection method.In future work we will study how to control the grasping force of multi-fingered robotic hand based on the proposed incipient slip detection method,to achieve safe grasping of objects of unknown weight and frictional coefficient.

Fig.10 Experiment results for different material objects
[1]Gunji D,Mizoguchi Y,Teshigawara S.Grasping force control of multi-fingered robot hand based on slip detection using tactile sensor.Proceedings of 2008 IEEE International Conference on Robotics and Automation.Piscataway:IEEE,2008.2605-2610.
[2]Mouri T,Kawasaki K.Anthropomorphic robot hand:Gifu Hand III.Proceedings of the International Conference on Control,Automation and System.Jeonbuk:2002.1288-1293.
[3]Senoo T,Yamakawa Y,Mizusawa S,et al.Skillful manipulation based on high-speed sensory-motor fusion.Proceedings of 2009 IEEE International Conference on Robotics and Automation.Piscataway:IEEE,2009.1611-1612.
[4]Michelman P,Allen P K.Haptic Perception with a Robot Hand:Requirements and Realization.Columbia University Technical Report,CUCS-452-89.1989.1-17.
[5]Gunji D,Mizoguchi Y,Ming A,et al.Grasping force control of multi-fingered robot hand based on slip detection.Proceedings of the 2007 JSME Conference on Robotics and Mechatronics.Akita:2007.1A2-B07.
[6]Strohmayr M W,Saal H P,Potder A H,et al.The DLR Touch Sensor I:A flexible tactile sensor for robotic hands based on a crossed-wire approach.Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems.Piscataway:IEEE,2010.897-903.
[7]Shinoda H,Ando S.A tactile sensor with 5-D deformation sensing element.Proceedings of the 1996 IEEE International Conference on Robotics and Automation.Piscataway:IEEE,1996.7-12.
[8]Yussof H,Wada J,Ohka M.Analysis of tactile slippage control algorithm for robotic hand performing grasp-move-twist motions.International Journal on Smart Sensing and Intelligent Systems,2010,3(3):359-375.
[9]Yamada Y,Maeno T,Fujimoto I,et al.Identification of incipient slip phenomena based on the circuit output signals of PVDF film strips embedded in artificial finger ridges.Proceedings of SICE Annual conference.Osaka.2002.3272-3277.
[10]Tremblay M,Cutkosky M.Estimating friction using incipient slip sensing during a manipulation task.Proceedings of 1993 IEEE International conference on robotics and automation.Piscataway:IEEE,1993.429-434.
[11]Francomano M T,Accoto D,Guglielmelli E.Experimental characterization of a flexible thermal slip sensor.Sensors,2012,(12):15267-15280.
[12]Jockush J,Walter J,Ritter H.A tactile sensor system for a three-fingered robot manipulator.Proceedings of 1997 IEEE International conference on robotics and automation.Piscataway:IEEE,1997.3080-3086.
[13]Damian D D,Martinez H,Dermitzakis K.Artificial ridged skin for slippage speed detection in prosthetic hand applications.Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems.Piscataway:IEEE,2010.904-909.
[14]Tsutsumi T,Shimizu S,Suzuki Y,et al.Highly sensitive sensor for detection of initial slip and its application in a multi-fingered robot hand.Proceedings of 2011 IEEE International Conference on Robotics and Automation.Piscataway:IEEE,2011.1097-1102.
[15]Kawamura T,Inaguma N,Nejigane K,et al.Measurement of slip,force and deformation using hybrid tactile sensor system for robot hand gripping an object.International Journal of Advanced Robotic Systems,2013,10(83):1-8.
杂志排行

Journal of Harbin Institute of Technology(New Series)的其它文章
- Research of Multiagent Coordination and Cooperation Algorithm
- Research on Two-Step Hydro-Bulge Forming of Ellipsoidal Shell with Larger Axis Length Ratio
- An Ant Colony Algorithm Based Congestion Elusion Routing Strategy for Mobile Ad Hoc Networks
- Robust Audio Blind Watermarking Algorithm Based on Haar Transform
- Impact of Online Community Structure on Information Propagation:Empirical Analysis and Modeling
- Prediction of Aircraft Engine Health Condition Parameters Based on Ensemble ELM