基于特征匹配的交通标志识别算法*
2013-09-11江治国陈小林
江治国,陈小林
(安徽国防科技职业学院机电工程系,安徽 六安 237011)
基于特征匹配的交通标志识别算法*
江治国,陈小林
(安徽国防科技职业学院机电工程系,安徽 六安 237011)
智能交通系统(ITS)是当前研究的热点,而在ITS中的关键技术之一就是交通标志的特征提取技术.针对交通标志的特征提取,提出利用尺度不变特征变换(SIFT)算法提取交通标志的点特征,采取最小距离分类器对特征向量进行分类,并通过Matlab、仿真验证实验结果,结果表明能够较好地检测出交通标志的特征.
智能交通系统;尺度不变特征变换;交通标志;特征提取;最小距离分类器
交通标志的识别最终是将检测到的交通标志的特征通过一些算法进行分类识别,当前很多学者提出采用向量机下机器学习模型[1]、模板匹配算法、聚类分析、人工神经网络等.基于特征的图像匹配技术根据匹配目标的需要进行特征的组合、变换,以形成易于匹配、稳定性好的特征向量[2].尺度不变特征变换[3](scale invariant feature transform,SIFT)算法就是基于模板匹配的算法之一,SIFT特征是图像的局部特征,该特征对旋转、尺度缩放、亮度变化保持不变性,对视角变化、仿射变换、噪声也保持一定程度的稳定性.SIFT的特征匹配算法在特征匹配方面取得显著进展,性能得到充分肯定.SIFT特征描述对于检测交通标志的特征点具有较好的性能,不仅能够提高系统的运算速度,而且具有较高的识别率,提取出的特征点进行SIFT特征描述,然后利用最近邻欧式距离进行匹配,能有效解决传统的特征匹配算法对图像尺寸和旋转比较敏感的问题.
1 SIFT算法理论
1.1 SIFT描述符
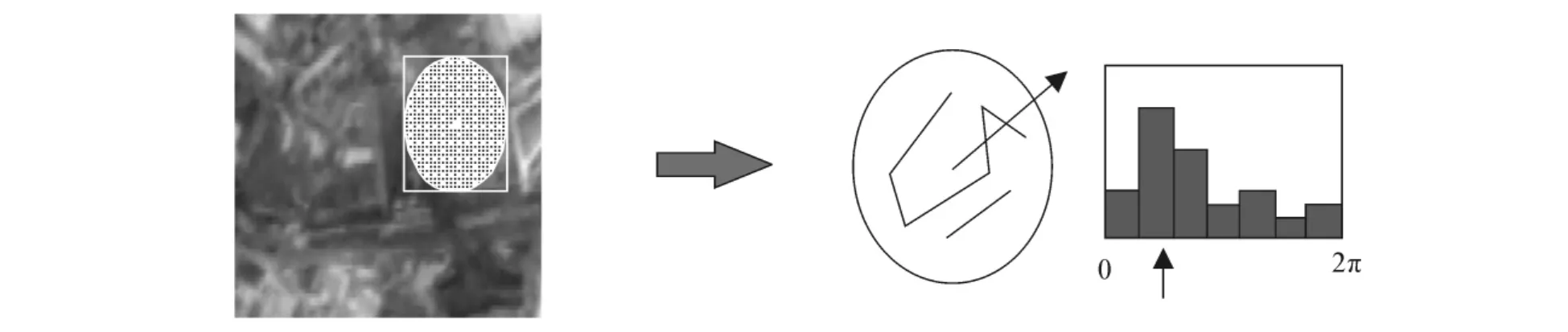
图1 SIFT描述符中主方向计算示意图
为了实现图像的旋转不变性,需要根据检测到的特征点的局部图像结构求得一个方向基准.使用图像梯度的方法求取该局部结构的稳定方向,对于已经检测到的特征点,知道了该尺度的特征值,根据这个尺度信息,选择描述该点的邻域大小,计算出此领域范围内的高斯图像梯度,再使用直方图,统计邻域内像素的梯度方向和幅值.如图1所示,梯度方向直方图的横轴是方向角,纵轴是梯度方向角对应的梯度幅值累加值.梯度方向直方图将0~360°的范围分为36个柱,每10°为1个柱,直方图的峰值代表了该特征点处邻域内图像梯度的主方向,即为该特征点的主方向.这个向量是该区域图像信息的一种抽象,具有唯一性.
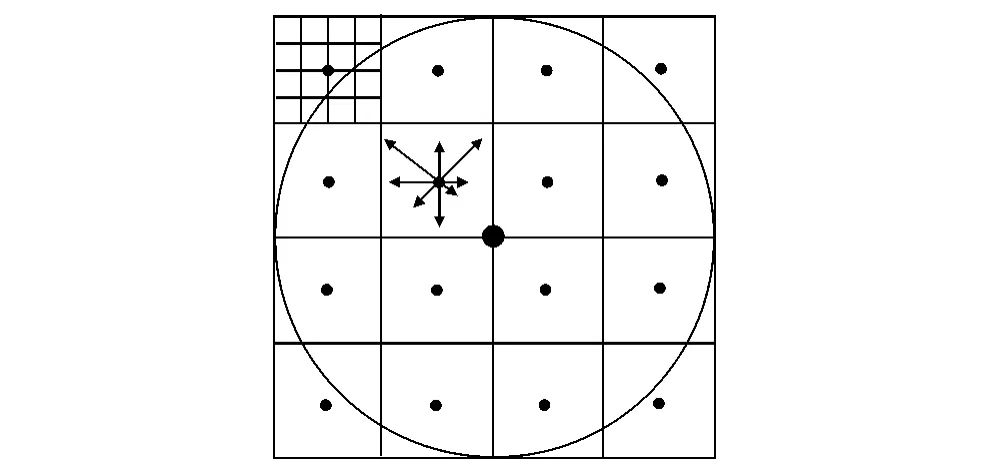
图2 SIFT描述符的128维向量生成图解
如图2所示,描述SIFT特征点的向量为128维,取关键点周围的16×16领域,按4×4大小划分,共分成16块.每块里面含有4×4个像素点,统计每块里面8个方向的梯度直方图,由于有16块,因此对一个关键点领域的描述子向量就是16×8=128维的特征向量,这样就生成了SIFT描述符.
1.2 SIFT算法
Lowe在前人的基础上提出了SIFT算法,该算法将斑点检测、特征矢量生成、特征匹配搜索等步骤完整地结合在一起进行优化,达到接近实时的运算速度.对于同一个场景拍摄到的2幅图像,若提取的2个特征点描述矢量间距离很小,则这2个特征点在对应场景的同一位置,若距离很大则不在同一位置.SIFT特征匹配是通过计算一幅图像中所有特征点与另外一幅图像中所有特征点之间的欧氏距离来实现的[4].从2组特征点集合中找到两两距离最近的特征点匹配对,这个匹配对对应的是场景中同一个位置.图3给出了在光照变化情况下SIFT算法的匹配分数,横坐标描述了光照变换的程度,纵坐标是匹配分数.由图3可以看出,SIFT算法在一定程度上对于光照变化保持较好的匹配效果.
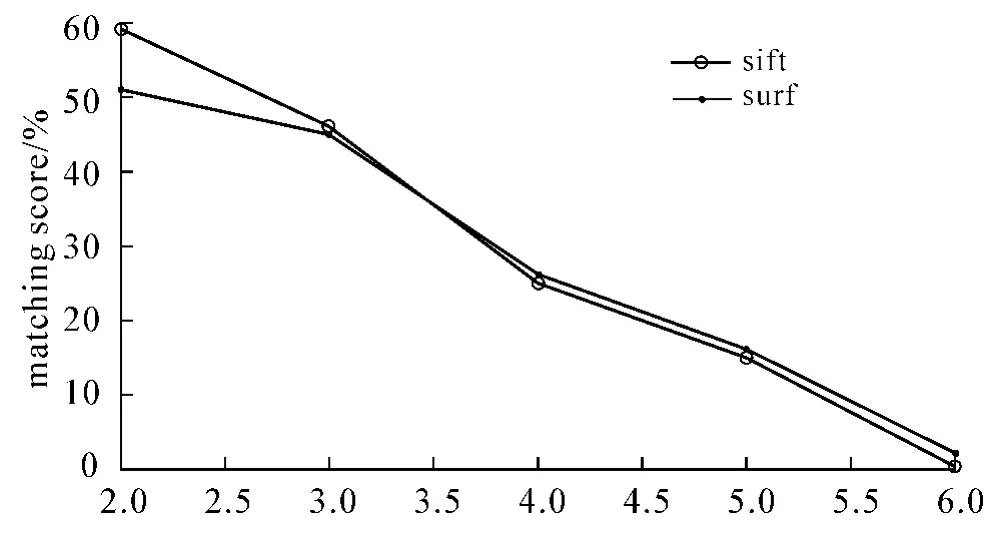
图3 光照变换下SIFT算法的匹配分数
2 基于SIFT算法交通标志识别流程设计
SIFT算法的流程如图4所示,交通标志识别系统的流程如图5所示.识别系统有3个分类器,分别为颜色特征分类器、形状特征分类器以及最小距离分类器[5],其中颜色特征分类器和形状特征分类器主要用于实现待测交通标志图的粗分类,然后通过最小距离分类器实现待测样本的细分类.另外,可以看到系统框架(图5)的右下角有一个小矩形框内的区域,包括交通标志数据库的子数据库和交通标志子数据库的特征子空间.交通标志子数据库的特征子空间存放的是交通标志样本的SIFT特征.
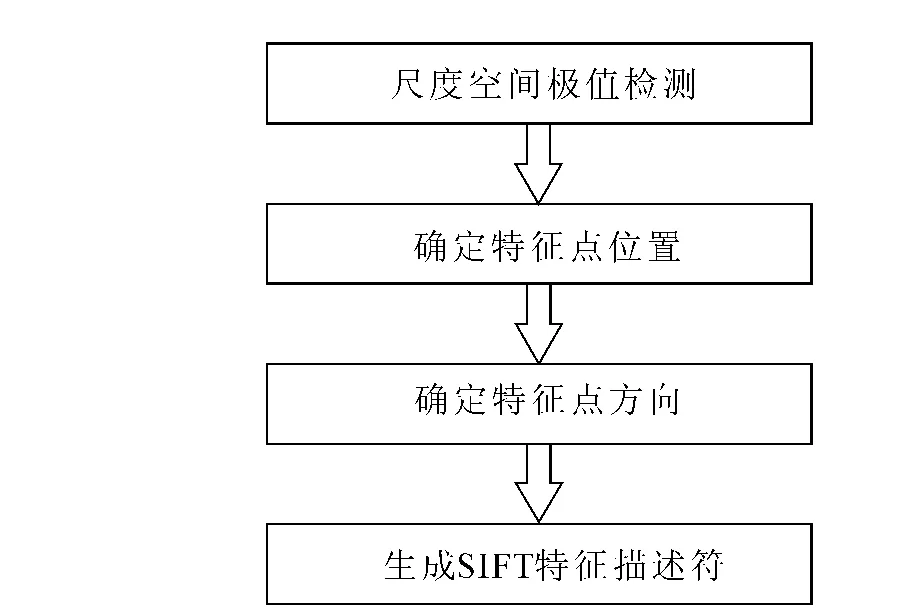
图4 SIFT算法的流程
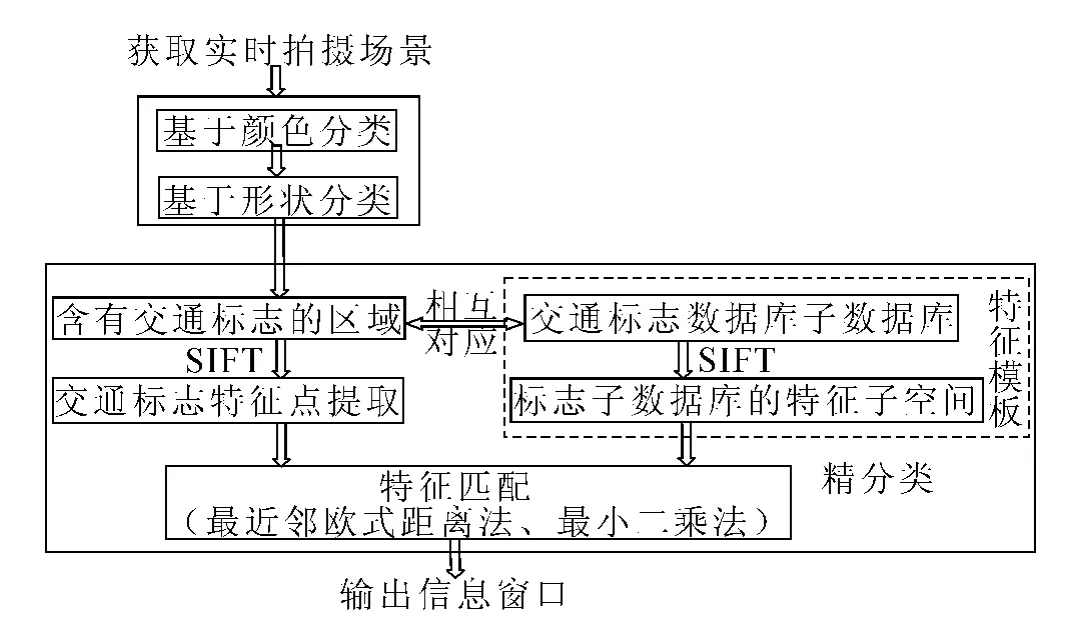
图5 交通标志识别系统的流程
SIFT算法特征提取部分源程序代码如下所示:



3 算法应用
3.1 特征库的建立
根据系统设计的要求,特征库为分层特征库,从上到下依次为颜色特征库、形状特征库和SIFT特征库.算法首先根据颜色特征将交通标志粗分类为蓝、黄和红3类,即指示标志、警告标志和禁令标志;然后根据形状特征进一步进行细化,将这3类交通标志根据是矩形、三角形、圆形或其他图形进一步细化;最后根据SIFT特征来进一步精确定位交通标志的类别,实现交通标志的识别.利用采集的自然场景下的图像作为实验样本,根据光照条件将图片分为早晨、中午和下午3种类型,根据天气状况不同分为晴天、有雾和雨天.试验选用样本数量如表格1所示.采集的部分图像样本如图6所示.

表1 不同天气环境下实验样本数量
将采集到的图像经过预处理后,从自然场景中分割出交通标志,根据颜色特征将交通标志粗分类,根据形状特征进一步进行细分类,最后根据SIFT特征来进一步精确分类,用4×4共16个种子点来表示图像每一个关键点的特征,每一个种子点有8个方向的向量信息,每一个方向信息包含了方向和大小2个元素,即每个关键点产生128维SIFT特征向量.将生成的特征向量存放在SIFT特征向量库中.
3.2 SIFT算法特征匹配

图7 SIFT算法匹配
对特征点进行描述一般分为2个步骤[6]:首先为特征点确定一个主方向,然后根据其领域信息生成特征向量.当2幅图像的SIFT特征向量生成以后,采用关键点特征向量的欧式距离作为2幅图像中关键点的相似性的判定度量,如图7所示,在2个关键点中,若最近的距离除以次近的距离少于某个比例阈值,则保留该匹配点.降低比例阈值,虽然SIFT匹配点数量减少,但是系统会更加稳定.
3.3 基于SIFT算法交通标志识别系统的设计
系统设计在Matlab R2009a平台下,Intel○RCore(TM)2 Quad CPU Q9500硬件平台、Windows XP pack3环境下进行.操作方法如下:点击“打开文件”按钮,选择并打开一张待测的交通标志图案,然后单击“颜色分类”按钮,根据颜色分类器对输入的交通标志进行粗分类,即确定是禁令标志、指示标志还是警告标志;接着单击“形状分类”,根据形状分类器来确定输入图像的形状特征,如圆形、矩形和三角形,进一步确定待测图像所属的类别;最后根据最小距离分类器来精确确定交通标志的类别.基于SIFT算法交通标志识别系统系统设计如图8所示.其中,“打开文件”按钮实现选择打开待测交通标志图的功能;“颜色分类”按钮根据输入待测交通标志图片的颜色特征,对交通标志进行粗分类,实现系统的第1层分类功能;“颜色分类器”面板里的编辑框用于显示颜色分类的结果;“形状分类”按钮则根据提取的形状特征实现交通标志的第2层分类功能;“最小距离分类”按钮则实现的第3层分类功能,根据SIFT特征实现系统的精细分类,确定待测交通标志的类别,实现该系统设计的最终目的.
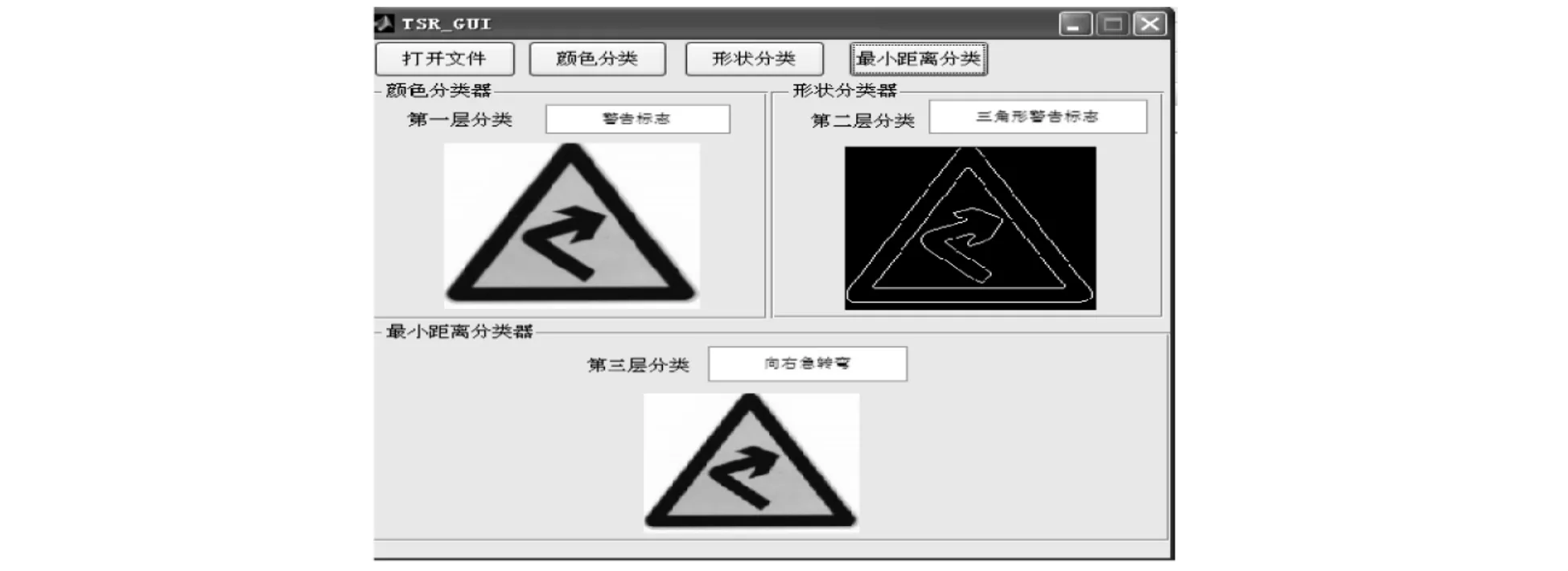
图8 交通标志识别系统界面
3.4 实验结果及分析
对采集的自然场景图像进行分割,分割出图像中的指示、警告和禁令标志,并对得到的交通标志进行放大、缩小、旋转变换,共得到140个测试样本.特征匹配模板采用国家标准交通标志库的图片,利用该系统和文中的算法进行相关实验,得到的统计结果如表2所示.

表2 实验系统识别结果统计
从图8的实验结果和表2的统计结果可以看出,文中提出的基于SIFT算法交通标志识别系统具有较高的识别率,但是对于一些交通标志相似度较高的交通标志会出现误识别.经过分析推知,这是由于相类似的交通标志图提取的SIFT特征具有很大的相似性,并且在利用最小分类器识别的时候,会出现一定范围内的误差.
4 结语
上述仿真实验及结果分析说明,SIFT算法对于交通标志的特征点匹配具有较高的优越性,不仅能够提高系统的识别率,而且能够简化识别系统,避免采用向量机下机器学习模型、人工神经网络等需要对实验样本进行训练的繁琐过程,在智能交通识别系统中具有较高的应用价值.
[1] 李 海,李春来,侯德艳.支持向量机下机器学习模型的分析[J].吉首大学学报:自然科学版,2010,31(3):39-40.
[2] 贾世杰,王鹏翔,姜海洋.基于SIFT的图像匹配算法[J].大连交通大学学报,2010,31(2):17-18.
[3] LOWE D G.Distinctive Image Features from Scale-Invariant Key-Points[J].International Journal of Computer Vision,2004,60(2):91-110.
[4] 杨幸芳,黄玉美.一种提高SIFT特征匹配效率的方法[J].中国机械工程,2012,23(11):1 297-1 301.
[5] 张 铮.数字图像处理与机器视觉[M].北京:人民邮电出版社,2010:428-430.
[6] 吴文欢,李骞,江泽涛.基于局部不变特征的图像匹配算法[J].计算机工程与应用,2012,48(14):168-170;219.
(责任编辑 向阳洁)
Traffic Sign Recognition Algorithm Based on Feature Matching
JIANG Zhi-guo,CHEN Xiao-lin
(Department of Mechanical and Electrical Engineering,Anhui Vocational College of Defense Technology,Liu’an 237011,Anhui China)
Intelligent transportation system(ITS)is currently a hot research subject,and the key technology in ITS is traffic signs feature extraction technique.This article,focuse on the characteristics of the traffic signs extraction,proposes use of the scale invariant feature transform algorithm to extract point characteristics of the traffic signs and use of minimum distance classifier to classify feature vectors.By Matlab,simulation is used to test the results.The results show that the characteristics of the traffic signs can be better detected.
intelligent transportation system;scale invariant feature transform;traffic sign;feature matching;minimum distance classifier
TP391
A
10.3969/j.issn.1007-2985.2013.01.008
1007-2985(2013)01-0028-05
2012-11-20
中央财政支持“高等职业学校提升专业服务能力项目”(580202);电工电子安徽省级示范实验实训中心项目(20101687)
江治国(1982-),男,安徽六安人,安徽国防科技职业学院机电工程系助教,硕士,主要从事数字图像处理研究.
