凸包内空间散乱点集Delaunay四面体角度剖分算法
2013-08-29邵铁政李世森
邵铁政,李世森
(天津大学,天津300072)
随着计算机能力的不断强大,三维空间内的有限元计算被越来越广泛的使用,因此三维空间内的网格划分也随之不断地被研究和改进。三维问题所采用的网格划分单元一般是四面体、六面体。而四面体网格具有灵活性较高及能够更好的逼近边界的特点。四面体网格生成的算法已经有许多重要的进展,如局部变换法、Delaunay 算法、四叉树/八叉树算法、单元生长法、网格前沿法等,其中以Delaunay 算法应用最广,因为其具有严谨的数学理论证明作为基础,能够由初始散乱点生成形态优化的网格,故称为Delaunay 网格[1]。
相对于二维领域而言,目前Delaunay 算法在三维领域内的研究还不够成熟,因为三维空间内,点、边、面的管理及单元之间的关系更加复杂,单元重叠的可能性较大,而且不易检验。经研究大部分Delaunay 算法[1-3],散乱点集的外边界进行Delaunay 三角剖分,而且需要先在散乱点内部形成一个初始的四面体剖分,然后通过交换或者寻找几何关系将内部四面体的剖分更新为新的Delaunay 四面体剖分,这样使得网格划分过程的前期工作量较大。本文适用于外包面为凸的散乱点四面体剖分,不需要内部初始四面体划分,提高了四面体网格划分的效率。
1 三维散乱点Delaunay 四面体网格生成方法
1.1 相关概念
Delaunay 算法源于1934 年B.Delaunay 提出的Delaunay 准则[4]。
三维Delaunay 准则的定义如下:
(1)定义1:对于三维空间内由一堆散点组成的四面体网格,若每一个四面体的外接球均不包含除此四面体顶点以外的网格点,则此四面体称为Delaunay 四面体,由这些四面体形成的网格称为Delaunay 网格。在已知大量初始散点的情况下,若不存在多点共球的情况,则由这些散点形成的Delaunay 网格是唯一的[5-6]。
为了方便寻找Delaunay 四面体,本文引入了一个新的角度概念——球缺角。由二维Delaunay 三角形圆心角判定方法推出三维空间下的部分相关定义如下。
为了阐述方便本文引入了平面域内、域外定义:
(2)定义2:如图1-a 以平面ABC 为例,右手展开拇指与其余四指垂直,四指沿A-B-C 方向握拳,拇指所指方向的空间,即平面ABC 上部O 点所在空间为域内,反方向的空间及平面ABC 则为域外。
四面体球缺角定义如下:
(3)定义3:如图1-a,ΔABC 为在三维空间内一个三角形,D 为在空间内与之构成四面体的点,O 为A、B、C、D 四点的外接球球心,半径为R。OA 为O 与ΔABC 任意顶点形成向量,则OA与ΔABC 的负法向量n的夹角就是点D 对ΔABC 的球缺角δ(0<δ<π)。
(4)四面体球缺角的特性1:由以上定义易知D 对ΔABC 的球缺角δ 唯一。
(5)四面体球缺角的特性2:在空间内当所有散乱点位于ΔABC 域内,一点与已知三角形构成Delaunay 四面体的条件是:这个点对ΔABC 的球缺角最大。
1.2 相关证明
(1)特性1 证明:根据定义3 可知,四面体球缺角即为球心与三角形所构成的圆锥的圆锥角的一半,所以得证。
(2)特性2 证明:图1-b 为图1-a 的正视图,球O 过A、B、C、D 四点,r 为已知ΔABC 外接圆半径,R 为球O 的半径,h 为O 到ΔABC 的距离,H 为ΔABC 域内球缺高,则球缺的体积

若D-ABC 为Delaunay 四面体,则根据[定义1]只需证明球缺内不包含任何点。若证明[特性2],只需证明球内任意点D1对ΔABC 的球缺角大于D 对ΔABC 的球缺角即可。
∵h=r×cotδ,R=r/sinδ,H=h+R
∴球缺体积V(δ)=(r/sinδ+r×cotδ)2×[3×(r/sinδ)-(r×cotδ+r/sinδ)] ×π/3
=(-cos3δ+3×cosδ+2)×πr3/(3×sin3δ)
由以上推导公式可知:
对于已经固定的ΔABC 外接圆半径r 不变,即球缺体积为以δ 为自变量的函数,则可求出并化简得到V-δ 函数的一阶导数
V′(δ)=-(1+cosδ)2×πr3/sin4δ
∴由于(0<δ<π),V′<0
得证V 与δ 反相关
如图1-b 易知在域内,D1点对ΔABC 的球缺体积必然小于点D 对ΔABC 的球缺体积。即D1点对ΔABC球冠角δ 更大。
当域内球缺小于半球时,δ 的范围是(π/2,π),即cotδ 为负,证明过程相同。
所以[特性2]得证。
2 编程实现散乱点四面体划分的步骤
2.1 散乱点数据读入
数据文件要求:散乱点按统一格式存入inputA.txt 文件中,顺序为“初始点号,x 坐标,y 坐标,z 坐标”。
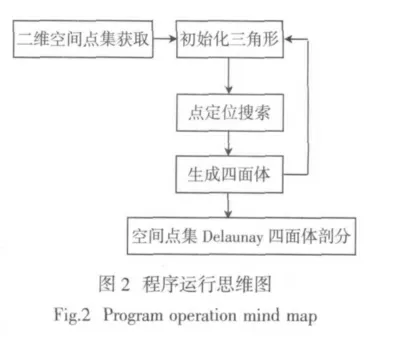
2.2 程序运行思维图
如图2 所示,程序运行分为以下几个步骤:
(1)三维空间点集获取:读取输入文件中的所有点的坐标,读取内容包括“初始点号,x 坐标,y 坐标,z 坐标”。
(2)初始化三角形:读取文件中的第一、二、三点为初始三角形。
(3)点定位搜索:由初始三角形根据四面体球缺角的特性2 在散乱点中寻找与之构成Delaunay 四面体的点,并生成Delaunay 四面体。
(4)循环运行搜索:在生成每一个四面体的同时,有3 个新的三角形生成,分别以新生成的三角形为初始三角形继续寻找对应的点。由此循环运行直至将所有的散乱点进行四面体划分。
2.3 搜索方法
步骤(3)中搜索方法分为以下几个部分:
(1)确定搜索区域:为减少程序的运算量,将所有散乱点分为域内、域外2 个部分(方法见3-(3)),只对域内部分进行搜索。
(2)计算球心坐标:分别将域内的所有点按顺序分别与初始三角形的3 个顶点组合,由子程序计算此空间四点的外接球的球心坐标O。
(3)计算保存向量:根据三角形顶点坐标求出三角形外接圆圆心坐标O1,向量OO1即为初始三角形负法向量。保存球心O 与任意三角形顶点形成的向量OA (根据[特性一],O 与任意顶点形成的向量与OO1夹角大小相同)。
(4)计算OA 与OO1夹角

计算出OA 与OO1夹角,并保存,以便经历一次搜索后找出最大的夹角,并确定为最大球缺角,该角对应的点与此初始三角形构成Delaunay 四面体。
3 程序的准确性和高效性
为提高程序运行的准确性和效率,本程序进行了以下几方面的处理:
(1)顺序记录:在每次计算所得的新三角形点数据,都按照顺时针方向进行记录,保存的新生成的数据格式符合初始运算格式,使程序可以循环进行计算。
(2)查重:由于初始三角形不同,对于每次生成的新的四面体来说有可能与前面生成的四面体重复,因此,对新生成的四面体进行查重,假设生成的新四面体4 个点的序号分别为(a,b,c,d),将(a,b,c,d)分别与之前生成的各数组对比,如果出现与(a,b,c,d)数值构成相同的数组,则取消该四面体,不存入,由此循环下去,并不断检验是否重复,直到令所有点都找到Delaunay 四面体则计算过程结束。
(3)域内域外判断:对于新生成的三角形来说一部分点位于该三角形的域内,另一部分位于域外。本程序对所有点与初始三角形的位置关系进行了预判,域外的三角形不必要进行复杂的计算,因此提高了程序的运行。四面体体积判定法:根据三维行列式正负的意义,A(x1,y1,z1)、B(x2,y2,z2)、C(x3,y3,z3)为空间的三点,D(x0,y0,z0)与三点的行列式表示的是四面体的体积(当D 位于平面ABC 的域内时V 为正,否则V 为负)。
四面体体积

(4)避免计算误差:本文采取了一系列方法避免计算过程中产生的误差,其中以下2 个方法用于整个程序中相关的计算步骤。①为避免计算机在计算时出现除以0 的数学错误,本程序在编译时避免了除法运算,全部使用正负号的判断,避免了计算机储存或计算中出现误差的情况。②在步骤(2)、(3)中计算球心、外接圆圆心时,本程序采用克拉默法则对方程组进行求解,但是在程序编译过程中发现,编程平台自带的IMSL 函数库在计算行列式过程中DET()函数使用lin_sol_lsq()来解方程[7],对于行列式值为0 或非常接近于0 的矩阵会失效,所以本程序中使用了重新编译的行列式计算函数进行相关计算,消除了此类计算误差。
4 时间复杂度分析
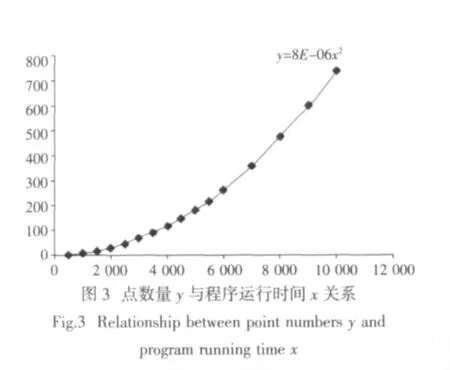
为了对本程序的计算效率进行比较,本文进行了程序运行时间复杂度的分析[8]。图3 为不同点数的情况下程序运行时间的趋势线情况。
根据趋势线可以看出计算的点的数量y 与程序运行时间x 的关系拟合曲线为y=8E-06x2,即时间与点数总量呈二次关系,该计算方法有良好的应用特性。
5 结束语
球缺角定义的提出,使Delaunay 四面体的剖分有了更加量化的方法,区别于以往的定性判断,量化的方法误差更小,更容易控制和比较。虽然在本方法的实践过程中仍有一些方面不完善,但是相信在不断地改进后,将对空间散乱点集Delaunay 四面体剖分方法的研究做出贡献,可用于各个领域的工程应用软件的开发。
[1]关文革,武强,贾丽萍,等.约束数据域Delaunay 四面体网格生成算法[J].华中科技大学学报:自然科学版,2005(5):67-69.GUAN W G,WU Q,JIA L P,et al. Algorithm of mesh generation of Delaunay tetrahedral in constrained domain[J]. Journal of Huazhong University of Science and Technology,2005(5): 67-69.
[2]WU Q,XU H.An approach to computer modeling and visualization of geological faults in 3d[J].International Journal of Geographical Information Systems,1993,7(6):501-524.
[3]XU H,WU Q.Design & implementation of visualization for 3d samdwich geological bodies[J]. Computer Applictations,2001,21(12):56-60.
[4]Lawson C L. Software for C1 surface interpolation,Mathematical Software III[M]. New York: Academic Press,1977: 161-194.
[5]陈学工,潘懋.空间散点集Delaunay 四面体剖分切割算法[J].计算机辅助设计与图形学报,2002(1):93-95.CHEN X G,PAN M. Delaunay Triangulation Cutting Algorithm for A Set of Irregularly Located Spatial Points[J]. Journal of Computer Aided Design & Computer Graphics,2002(1): 93-95.
[6]王建华,徐强寻,张锐.任意形状三维物体的Delaunay 网格生成算法[J].岩石力学与工程学报,2003,22(5):717-720.WANG J H,XU Q X,ZHANG R. Delaunay algorithm and related procedure to generate the tetrahedron mesh for an object with arbitrary boundary[J].Chinese Journal of Rock Mechanics and Engineering,2003,22(5):717-720.
[7]李丽.三维空间Delaunay 三角剖分算法的研究及应用[D].大连:大连海事大学,2010.[8]彭国伦.Fortran95 程序设计[M].北京:中国电力出版社,2010.
