视觉识别机器人在物流作业中的智能应用
2013-08-22金桂根穆建军
金桂根,穆建军
(1. 昆明理工大学,昆明 650504;2. 云南财经大学,昆明 650221;3. 昆船物流信息产业有限公司,昆明 650051)
0 概述
从作业方式来看,工业机器人在生产制造中的应用主要为产品的焊接和装配,在物流作业中的应用主要为物料的堆码和拆垛。据不完整统计,前者的总数占比约为70%~80%,后者的总数占比约为20%~30%,近年来后者的增长速度较前者快。随着物流领域对自动化、智能化的要求进一步提高,工业机器人的应用范围将进一步扩大,在物流系统中的应用也就不仅仅局限于规范物料的堆码和拆垛,而需要处理复杂多变的工艺模式及形态各异的物料品项。例如,在卷烟生产物流作业系统中,工业机器人除了对比较规范的成品件箱进行堆码、拆垛作业,还要对木夹板烟包进行剪带、切膜、抓板、去夹板作业,对形状各异的卷烟辅料根据卷接包生产机组的需要进行任意的堆码配盘。
然而,对于多种尺寸不同形态的物料品项及复杂的物料处理工艺,传统的条码识别和RFID识别不能足以辨识物料信息与状态信息。在机器人系统中集成先进的机器视觉识别技术,就如给机器人配上了一双眼睛,通过图像获取、图像识别、图像定位,并自编程序去适应工作对象,能增加机器人自适应、自学习功能,使之具有更高的智能性,并能完成复杂条件下的物料处理作业,从而进一步提升工业机器人在物流作业系统中的适用性和可靠性。
1 视觉识别
“机器视觉”,即采用机器代替人眼来做测量和判断,通过CCD/CMOS图像摄取装置抓取图像后将图像传送至处理单元,通过数字化处理,根据像素分布和亮度、颜色等信息,来进行尺寸、形状、颜色等的判别,进而根据判别的结果来控制相应设备的动作。伴随计算机技术、现场总线技术的发展,视觉识别技术日臻成熟,已是现代制造业及现代物流业不可或缺的产品,目前已广泛应用于各个行业。
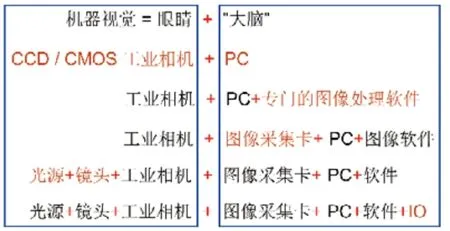
图1 视觉识别系统配置模式
视觉识别主要指在抓取或放置物品时的物品识别,主要由机器视觉及系统软件组成,其配置模式如图1所示。在接收到传感器发出的物品识别及定位的请求后,系统通过摄像头获取物品图像,再由视觉系统软件利用获取的物品图像与预先摄取并存储于图像数据库的物品信息比较,搜寻与获取的物品信息相匹配的存储图像。需识别的物品便是与获取的物品图像相匹配的存储图像所对应的物品,计算并返回系统该物品当前的位置及状态信息,进而上传给机器人控制系统进行相应动作。
2 工业机器人
工业机器人是机电一体化、信息及人工智能等多学科交叉的自动化装备,主要由本体、驱动系统和控制系统三个基本部分组成。本体包括臀部、臂部和手部等机械结构,驱动系统包括动力装置和传动机构,用以使执行机构产生相应的动作;控制系统是按照输入的程序对驱动系统和执行机构发出指令信号,并进行控制。
应用工业机器人的自动作业,不仅可提高产品的质量与产量,而且对减轻工人劳动强度,改善劳动条件,降低作业成本等方面均有着非常重要的意义。目前,机器人技术及其产品已成为生产制造及物流作业中非常重要的自动化工具,进而是智能化工具;就像计算机、网络技术一样,工业机器人的广泛应用正在日益改变着人类的生产和生活方式。图2为工业机器人在物流作业中的一般应用。

图2 工业机器人物流堆码/拆垛作业
3 智能应用案例
3.1 简介
在卷烟工业生产自动化物流作业过程中,为了保证卷烟品质,卷烟工艺要求不同品牌的生产烟丝中不能混合,所以对存贮原料的周转容器的清洁度要求很高,在翻箱倒料后不能在箱底及内侧留下残留物。如果采用人工方式对物料进行检查识别,并进行残留原料的清扫处理,劳动强度会很大,质量不一定能得到保证,而且会影响工人的身体健康。
在案例中采用了Siemens机器视觉识别系统,配合ABB工业机器人进行智能作业,其基本流程为:周转箱输送到站台工位,机器人抓取后旋转,完成翻箱倒料作业,并在机器视觉系统和清扫装置的配合下,完成箱体内侧残留烟丝的清扫工作,完全满足卷烟生产工艺及质量要求。由于抓取箱体的重量超过150千克,长宽高尺寸均大于1m,应用了较大宽度尺寸的机器人夹具,其三维示意图如图3所示。
机器人可以实现复杂动作的自动化,但难以实现自适应作业的智能化。可以想象,在该案例中,除了视觉识别,似乎没有其它感应及检测技术能自动识别箱体内残留物的随机出现的位置及状态,以使机器人能够有效地进行智能作业,所以该案例具有一定的代表性。

图3 视觉识别机器人作业示意图
3.2 系统配置
机器视觉识别系统主要包括光源、照相机系统、图像处理单元、图像处理组态软件、监视设备、通讯输入输出单元等,系统配置如图4所示,其中VS Link具备了多种实用的接口,可同时观测多幅图像和结果表,可通过工业以太网集中监测多个视觉传感器,SIMATIC S7是系统的主控制器,具备以太网和PROFIBUS-DP接口,VS72X是机器视觉识别系统的主要部件,它通过以太网与系统其他部件进行通讯。

图4 视觉识别系统配置示意图
3.3 识别功能
通过软件组态,机器视觉识别系统提供了以下五种功能:
1)灰度识别:使用灰度测试的软传感器对灰色范围分布作测定;
2)颜色分析:颜色照相功能可以将不同颜色的物体分割、分配和预处理;
3)斑点分析:通过对几何图形的分析,实现对斑点的查找、计数和跟踪功;
4)代码读取:在各种窗口中读取一维或二维代码进行翻译;
5)测量工具:可用于测量距离和角度。
3.4 应用结果
由于原料为深黄色,而且比较吸光,因此使用了机器视觉识别系统中的灰度识别功能对残原料进行识别。经过认真组态,系统对具有残留原料的箱体能够做出正确的评判(报告结果分为三种状态:正常、报警和失败),完成监测和操作任务,识别准确率及机器人作业成效均达到了卷烟生产的工艺及质量要求,总体应用各项指标良好。
4 结束语
机器视觉识别系统的应用,在一定程度上解放了人眼,增强了机器人的智能特征。但在上述案例实施过程中,我们发现外界环境的改变将直接影响到系统识别的稳定性。首先,照相机与待识别物之间的相对位置应尽量固定,位置的改变将导致捕获的图像有所偏移,直接影响到识别效果,因此相机的固定非常重要;其次,由于光源的变化会影响成像质量,在精度要求较高的情况下,这将直接影响到识别效果;另外,由于是对物体的成像进行识别,箱体颜色应尽量与物料颜色区别开,近似的颜色及纹理不利于识别。
所以,在机器人作业系统集成视觉识别技术的过程中,需要针对作业环境作相应的系统设计和调试,实现系统稳定可靠。随着3D机器视觉、计算机及网络技术的新进步,集成有视觉识别技术的工业机器人将具有更高的智能和柔性,从而能适应复杂的作业对象,能在物流领域有着更为广阔的应用空间。
[1] 张鹤松.烟草生产物流中机器人作业的应用[J].物流技术与应用,2009(05).
[2] 曹月琴,穆建军,楼冬梅.机器视觉识别技术在烟丝/烟叶箱式自动存储系统中的应用[J].物流技术与应用,2010(05).
