轮履复合式变形车轮的设计与越障性能分析*
2013-08-19曲杰钟伟斌
曲杰 钟伟斌
(华南理工大学 机械与汽车工程学院,广东 广州 510640)
专门从事于救援和搜救的车辆常常面临着地形复杂且难以预测的非结构化的工作环境,特别是当遇到诸如地质灾害而导致的救援生命线中断时,普通的轮式车辆根本无法进入灾区实施救援.同时,救援工作要求车辆必须在第一时间到达事故现场,对车辆的灵活性提出了较高的要求.为了使车辆或者移动机器人具有良好的地面适应性,科研人员充分结合了轮式、履带式及腿式运动机构的优点,研发出了多种能够适应复杂路面条件的移动机构,如中国科学院沈阳自动化研究所的NEZA-I 机器人[1]、加拿大谢布鲁克大学的AZIMUT 机器人[2]、北京理工大学的小型轮履腿复合式机器人[3]、韩国大邱庆北科技研究所的轮履复合机器人[4]、捷克布尔诺理工大学的HYBRID 移动机器人[5]等复合式的运动机构.又如国防科技大学的四连杆履带式变形机器人[6]、大连大学的越野车用变形履带系统[7]、法国的VGTV 机器人[8]、韩国科学技术学院的可变履带式救援机器人[9-10]、韩国全北国立大学的履带式救援机器人[11]等可变形履带的运动机构.但若要将上述机构运用于车辆上,须对车辆进行较大的改造,成本较高.对此,文中提出一种新型的轮履复合式变形车轮(后文简称变形车轮)的设计,相对其他设计而言,该变形车轮具有以下特点:
(1)该变形车轮可以像普通轮胎一样直接安装于现有的车辆上,使车辆具有良好的地面适应性.
(2)该变形车轮采用纯机械结构,开发和制造成本较低.
(3)采用橡胶履带代替充气式橡胶轮胎的变形车轮,可以避免由于灾难现场不良路面环境导致车胎爆裂而引发的事故,同时增加其通过性.
文中介绍了变形车轮总体技术方案,包括变形车轮的结构特征、运动模式以及各个部件的工作原理和结构设计;通过理论分析对变形车轮两种运动模式的越障性能进行比较,验证了变形车轮的可行性.
1 轮履复合变形车轮的技术方案
1.1 结构特征
变形车轮由变径轮辋部件[12]、履带轮部件以及外圈包覆的橡胶履带构成,如图1 所示.作为两种行进模式的主驱动机构,变径轮辋部件上的主轴与汽车半轴通过法兰连接并作为动力输入.作为履带式行进的一个重要部件,履带轮部件上还安装了变形驱动装置,根据不同的地面条件,可改变变形车轮的运动模式,从而提高车辆的越障性和环境适应性.

图1 变形车轮的整体结构Fig.1 Structure of transformable wheel
1.2 运动模式及其特性
变形车轮具有轮式和履带式两种运动模式,如图2 所示.
(1)轮式运动模式:当车辆在较为平坦和僵硬的地面上行驶时,采用轮式运动模式.如图2(a)所示,变径轮辋部件处于大径状态,在该模式下,变径轮辋部件与张紧在其外侧的橡胶履带同步转动.
(2)履带运动模式:当车辆在较为崎岖和泥泞的地面上行驶时,采用履带运动模式.如图2(b)所示,变径轮辋部件处于小径状态,在该模式下,变径轮辋部件作为橡胶履带的驱动轮,带动履带转动.

图2 变形车轮的运动模式Fig.2 Locomotion mode of transformable wheel
2 变形车轮各部件的结构设计
2.1 变径轮辋部件的结构设计
变形轮辋部件由6 个曲柄滑块机构并联组成,如图3 所示.变形盘的转动带动6 个曲柄同步转动,从而带动固定在套筒组上的小径轮辋向外伸展或向内收缩,小径轮辋的伸缩运动带动连接轮辋、大径轮辋同步做伸缩运动,从而改变部件的工作半径.

图3 变径轮辋部件的机构原理Fig.3 Mechanism principle of diameter-varying wheel rim
2.2 履带轮部件的结构设计
如图4(a)所示,履带轮部件由两个曲柄滑块机构并联而成.当转盘转动时,连杆A、连杆B 拉动前张紧轮组和后承重轮同步做伸展或收缩运动,以满足轮式或履带式运动的工作要求.

图4 履带轮部件的机构原理Fig.4 Mechanism principle of track parts
2.3 变形驱动
当需要变形时,手动控制拨叉将滑动花键拨于左侧,如图5 中粗实线位置,转动变形摇把,通过锥齿轮、蜗轮蜗杆、花键及滑动花键传动,带动转盘及变形盘旋转,从而切换变形车轮的工作模式.其中右侧转盘的动力是由左侧转盘通过链传动传递的;变形完毕后,滑动花键拨于图中细实线位置,与变径轮辋部件的轮毂配合,同时与左侧蜗轮脱离配合,使得整个变径轮辋部件可随主轴一起转动传递动力.变形前后拨叉的位置及效果如图6 所示.

图5 变形传动示意图Fig.5 Driven sketch for locomotion mode shift

图6 拨叉工作原理Fig.6 Principle of shift fork
2.4 关键结构参数的设计要求
由变形车轮的结构特点和履带式运动的特点确定变形车轮关键结构参数时,应遵循如下要求:
(1)变形过程中履带长度形变量尽可能小,其松紧度不影响两种运动模式的正常工作和切换.
(2)在满足其他性能要求的前提下,履带式运动时履带接地长度尽可能长.
根据要求,对影响履带长度变化与接地长度的结构参数进行分析.如图7 所示,L1、L2、L3、La、Lb分别为轮A1和A5、A1和A2、A4和A5、A3和A4、A2和A3相切的履带长度,l1、l2、l3、l4分别为与轮A1、A2、A4、A5相接触的履带长度,α、β 分别为L1、L2与地面的夹角.相关参数含义为:变径轮A1的大径为R,小径为r,变径比(R/r)为K;轮A2、A3、A4、A5的半径分别为R2、R3、R0、R0,履带前攻角为η,轮A4、A5的中心距为m.

图7 变形车轮机构参数分析图Fig.7 Parameter graph of transformable wheel
由图7 可见,履带总长度可表示为

根据图7 中的几何关系,α、β、L1、L2、L3、l1、l2、l3、l4可分别表示为:


由轮式运动结构知,履带总长度也可以表示为LW=2 R.变形前后履带总长度的变形量可表示为La、Lb、R、R0、R2、r、m、η 的函数:

考虑到橡胶履带的伸缩性,假定履带变形量不超过轮式履带总长度Lw的0.1%即可满足要求(1).根据方程(2),在参数(R、R0、R2、r、m、η)均确定、满足要求(1)的情况下,求La、Lb,使得接地长度最大,即求解如下约束优化问题:

在实际中取参数实际值R=400 mm,R2=120 mm,R3=80 mm,R0=60 mm,m=220 mm,η=40°.
根据上述数据,通过序列二次规划算法求得方程(3)的最优解[13],可绘出变径轮辋部件的小径r与履带式最大接地长度e 的关系,如图8 所示.

图8 r 与e 的关系Fig.8 Relation between r and e
由图8 可以看出,在其他结构参数相同的情况下,履带式的最大接地长度随着变径轮辋小径的增大而减小,并且其关系接近线性比例关系.
3 越障性能对比
下文将对比车辆在两种模式下的越障性能,以验证变形车轮设计的合理性.
3.1 爬坡能力对比
车辆在爬坡时,主要的行驶阻力为坡度阻力和加速阻力,空气阻力与滚动阻力可以忽略不计[14].在讨论车辆最大爬坡能力时认为车辆是匀速运动,即加速阻力为零.车辆在坡上运动时,受力情况如图9 所示.其中 和γ 分别是轮式行进和履带式行进的最大爬坡角.

图9 车辆爬坡受力图Fig.9 Force diagram in grade climbing
根据图9 的力学模型建立方程:

式中,FW、FT分别是轮式和履带式的最大地面反作用力,FR、Fr分别是在相同发动机扭矩输出下,轮式和履带式运动的最大驱动力;FU、FV分别为轮式和履带式爬坡时的最大土壤推力.由式(4)、(5)可得:

针对各种不同性质的土壤,轮式和履带式车辆所能获得的最大土壤推力都能用下式表示[15]:

式中,Q 为垂直于土壤表面的负荷,A 为车轮的接地面积,C0、φ 分别为土壤的粘聚系数和摩擦角.
设某装载了变形车轮的车辆的重量为50000N,车轮宽度为420mm,某种粘性土壤参数C0=13.79kPa、φ=22°[14].在图8 中抽取几个不同小径时的最大接地长度e,并忽略车辆爬坡时土壤的下陷,由式(6)、(7)、(8)算出在该土壤条件下轮式运动与履带式运动的最大爬坡角度,见表1.
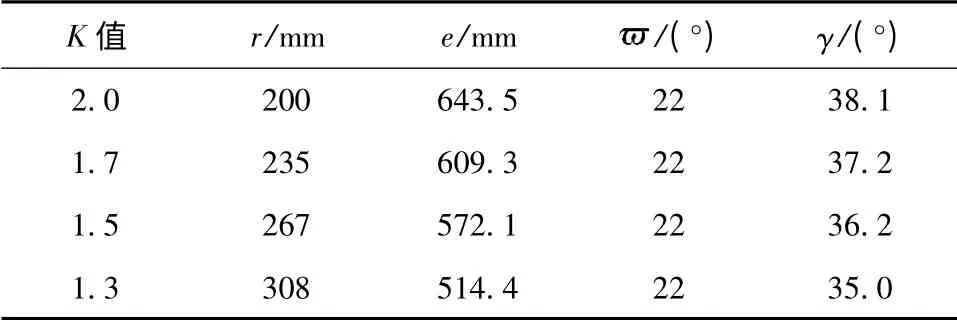
表1 不同K 值下的参数Table 1 Parameters for different K
结合式(4)-(7)以及表1 中的数据可以绘制出在该种土壤条件下,不同K 值下的履带式与轮式爬坡角度比γ/ 与轮式驱动力系数μ(定义为FR/G)之间的关系曲线,如图10 所示.
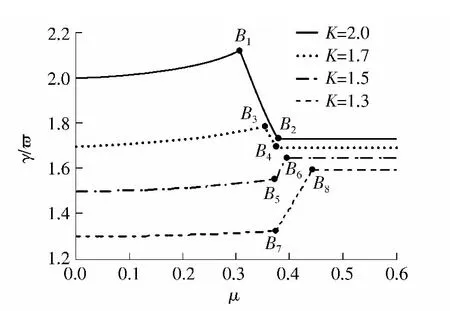
图10 最大爬坡角度比与轮式驱动力系数的关系Fig.10 Relation between maximum upgrade angle and thrust modulus
由图10 可以看出:①对同一车辆来说,在相同的μ 下,履带式运动的爬坡角度总比轮式运动的要大;在μ 较小时,两者爬坡角度的比近似等于K;当μ 较大时,两者的爬坡角度比随μ 的增大而增大,而且K 值越大,增长的趋势越明显.②当K 值较大时,履带式运动先达到爬坡极限(图中点B1、B3).此时继续增大μ 反而会使爬坡角度比降低,直至轮式运动也达到爬坡极限(图中点B2、B4).③当K 值较小时,轮式运动先达到爬坡极限(图中点B5、B7),此时继续增大μ 会使爬坡角度比迅速增加,直至履带式运动也达到爬坡极限(图中点B6、B8).
3.2 最大翻越台阶高度对比
车辆在翻越台阶障碍时,车速很低,可用静力学平衡方程求得汽车最大翻越障碍高度.后轮驱动4 ×2轮式车辆后轮越过硬地面上的台阶时的受力情况如图11 所示.

图11 轮式4 ×2 车辆后轮通过台阶时的受力情况Fig.11 Force diagram of 4 × 2 wheel vehicle when rear wheels climb step
图11 中,F1为地面对车轮的反作用力,fF1为地面摩擦力,F2为台阶对车轮的反作用力,h1为台阶高度,c 为车辆轴距,g 为轮式翻越台阶时重力G 对后轮轮心的力臂,φ 为F2与水平面的夹角.
假定地面附着系数足够大,则车辆的驱动力能够全部用于翻越台阶,在硬路面上滚动阻力摩擦系数f≈0,故可忽略地面摩擦力的影响,则后轮碰到台阶时可建立平衡方程组:
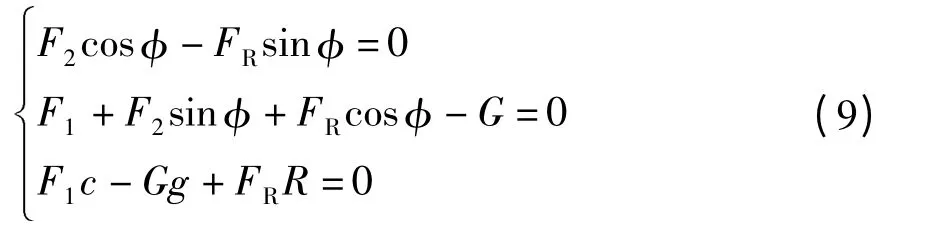
由图11 中的几何关系可知

综合方程组(9)和式(10)可得

同理,当车辆采用履带式运动时越过台阶的受力图如图12 所示.

图12 履带式4 ×2 车辆后轮通过台阶时的受力情况Fig.12 Force diagram of 4×2 track vehicle when rear wheels climb step
图中,q 为履带式翻越台阶时F1对后轮轮心的力臂,p 为履带式翻越台阶时重力G 对后轮轮心的力臂,H 为后轮轮心高度,a 为轮A3和A4中心距,s 为轮A2和A4接地点之间的距离,h2为台阶高度,hd为轮A3与履带的切点到地面的高度,ψ 为F2与水平面的夹角.
同样地,假定地面附着系数足够大,并且忽略地面摩擦力的影响.则根据图12 的力学模型可建立平衡方程组:

图中R <H≤d +R2,其中d 是变径轮辋部件与后承重轮的中心距.由图12 中几何关系有:

在相同发动机扭矩输出下,轮式运动与履带式的最大驱动力比

式中,M 为发动机曲轴到半轴的总传动比,T 为发动机的输出扭矩.
综合方程组(12)及式(13)-(16)可得

对式(11)、(17)进行分析比较可得,K 越大,履带式运动翻越台阶的优势越明显.适当调整车轮的结构参数,提高S*的值,也可提高履带式运动翻越台阶的优势.
用同样的方法可分析履带式4 ×2 车辆前轮越过台阶和履带式4 ×4 车辆越过台阶时相对于轮式的优势.
4 结论
(1)设计一种新型轮履复合式变形车轮,该变形车轮具有轮式与履带式两种运动模式,可根据路面要求更改车轮的运动模式,从而使安装了该变形车轮的车辆具有较好的通过性和环境适应性.
(2)采用理论分析的方法对变形车轮两种模式的越障性进行对比,研究表明,变径比越大,与轮式模式相比,履带模式爬坡性能和翻越台阶性能优势越明显.这为变形车轮结构参数的设计提供了参考.
(3)分析表明,变形车轮充分结合了轮式与履带式行进方式的优点.在较为平坦的硬质路面下,使用轮式运动模式能够使车辆具有较好的机动性;在轮式运动无法通过,或是能勉强通过但是行驶效率很低的障碍路面或者无路地区,改变变形车轮的工作模式,使车辆以履带模式运动,即可顺利通过障碍.
文中从运动学角度给出了一种新型轮履复合式变形车轮的设计并对其进行了越障性能分析,下一步将进行关于变形车轮的细节设计.
[1]李智卿,马书根,李斌,等.具有自适应能力轮-履复合变形移动机器人的开发[J].机械工程学报,2011,47(5):1-10.Li Zhi-qing,Ma Shu-gen,Li Bin,et al.Development of a transformable wheel-track robot with self-adaptive ability[J].Chinese Journal of Mechanical Engineering,2011,47(5):1-10.
[2]Francois Michaud,Dominic Létourneau,Martin Arsenoult,et al.Multi-modal locomotion robotic platform using legtrack-wheel articulations[J].Autonomous Robots,2005,18(2):137-156.
[3]段星光,黄强,李科杰.小型轮履腿复合式机器人设计与运动特性分析[J].机械工程学报,2005,41(8):108-114.Duan Xing-guang,Huang Qiang,Li Ke-jie.Design and motion analysis of miniature wheel-track-legged mobile robot [J].Chinese Journal of Mechanical Engineering,2005,41(8):108-114.
[4]Kim Y G,Kwak J H ,Kim J,et al.Adaptive driving mode control of mobile platform with wheel-track hybrid type for rough terrain in the civil environment[C]∥Proceedings of 2010 International Conference on Control,Automation and Systems.Kintex:IEEE,2010:86-90.
[5]Vysin M,Knoflick R.The hybrid mobile robot[C]∥Proceedings of the 2003 IEEE International Conference on Industrial Technology.Maribor:IEEE,2003:262-264.
[6]赵希庆,尚建忠,罗自荣,等.四连杆变形履带式机器人的越障性能分析[J].机械设计与研究,2009,25(6):36-39.Zhao Xi-qing,Shang Jian-zhong,Luo Zi-rong,et al.Analysis on the performance of obstacle surmounting for deformable tracked robot with four links[J].Machine Design and Research,2009,25(6):36-39.
[7]关浩,刘宁,崔亚菲,等.一种新型越野车用变形履带系统设计[J].机械工程师,2008 (1):74-75.Guan Hao,Liu Ning,Cui Ya-fei,et al.A new kind of transmuting track system on cross-country vehicle [J].Mechanical Engineer,2008 (1):74-75.
[8]Paillat J L,Lucidame P,Hardouin L.Variable geometry tracked vehicle (VGTV)prototype:conception,capability and problems[EB/OL].(2009-10-21)[2012-02-02].http:∥conferences.telecom-bretagne.eu/data.
[9]Kang S C,Cho C H,Lee J,et al.ROBHAZ-DT2:design and integration of passive double tracked mobile manipulator system for explosive ordnance disposal [C]∥Proceedings of the 2003 IEEE International Conference on Intelligent Robots and Systems.Nevada:IEEE,2003:2624-2629.
[10]Lee C H,Kim S H,Kang S C,et al.Double-track mobile robot for hazardous environment applications [J].Advanced Robotics,2003,17(5):447-459.
[11]Kim J H,Lee C G.Variable transformation shapes of single-tracked mechanism for a rescue robot [C]∥Proceedings of the 2007 IEEE International Conference on Control,Automation and Systems.Seoul:IEEE,2007:1057-1061.
[12]中国矿业大学.一种自动适应路面的变径车轮:中国,201010290940.0[P].2011-01-26.
[13]Schittkowski K.NLPQLP:a Fortran implementation of a sequentialquadratic programming algorithm with distributed and non-monotone line search-user’s guide[R].Bavaria:Department of Computer Science,University of Bayreuth,2010.
[14]余志生.汽车理论[M].北京:机械工业出版社,2009.
[15]庄继德.汽车通过性[M].长春:吉林人民出版社,1980.
