基于单站序列图像的导弹脱靶量测量方法
2013-08-16蔺建英马海潮
蔺建英 马海潮
1. 91245部队,辽宁葫芦岛125001 2. 92941部队,辽宁葫芦岛125001
基于单站序列图像的导弹脱靶量测量方法
蔺建英1马海潮2
1. 91245部队,辽宁葫芦岛125001 2. 92941部队,辽宁葫芦岛125001

在导弹攻击地面目标时,当导弹过靶时刻由激光或无线电等设备获得时,提出了利用1台小型非精密的带有IRIG-B时间码同步的高速数字摄像设备测量导弹脱靶量的方法。首先将高速数字摄像设备沿导弹航向布设在靶面前方,采用近距离固定拍摄方式;然后在靶标两侧各设置1个方位标,使导弹、靶标、方位标同时成像在高速数字摄像设备拍摄的序列图像中,用方位标实时标校高速数字摄像设备参数;最后通过站址、靶标、靶面和导弹相互间的空间几何关系,建立导弹脱靶量测量数学模型,对导弹过靶前后的序列图像进行处理,得到导弹脱靶量。在高速数字摄像设备的跟踪架轴系精度、轴角编码器精度、光学镜头参数等与大型精密光学测量设备相比降低几十倍的情况下,导弹脱靶量测量精度高于大型精密光学测量设备远距离交会的结果。 关键词 在轨服务;非合作目标;输出反馈鲁棒控制
在导弹的飞行试验中,脱靶量是导弹试验鉴定的一项关键参数,导弹脱靶量可采用光学、无线电[1]和声学等测量方式实现,其中光学测量具有直观、可视和精度高等特点。光学测量通常采用与目标具有一定距离和相对位置关系的2台光学测量设备远距离跟踪拍摄目标,同步测量目标的方位角和俯仰角,通过交会定位数学模型解算导弹脱靶量,需要采用大型精密的光学测量设备,对设备跟踪架的轴系(垂直轴、水平轴和视轴)精度、方位和俯仰编码器测角精度、光学镜头参数等有很高要求,设备组成复杂,造价昂贵,特别是在远距离低空条件下,受大气折光等影响[2],数据处理误差源多,脱靶量测量精度难以提高。
在导弹攻击地面目标试验中,一般都有拍摄导弹中靶实况的带有IRIG-B时间码同步的高速数字摄像设备,这些设备拍摄帧频可达1000帧/s,像面分辨率可达百万以上像元,但这些设备结构简单、造价低、不具备高精度的跟踪架及精密的光学系统,如果能利用导弹攻击地面目标的一些有利条件,对高速数字摄像设备相关参数进行实时标校,用其完成导弹脱靶量测量是非常有意义的。
1 高速数字摄像设备的布站与标校
在导弹攻击地面目标时,靶标的位置和包含靶标垂直于水平面的靶面的方位角(导弹射向)是已知的,当导弹过靶时刻也由激光或无线电等设备获得时[3],用一台带有IRIG-B时间码同步的高速数字摄像设备即可完成导弹脱靶量测量。
1.1 高速数字摄像设备、方位标与靶面的相对位置
将高速数字摄像设备布设在包含靶标的预定靶面的正前方,采用近距离、固定式(非跟踪式)拍摄方式,布站距离可选择200~600m,设备测向与靶面夹角在70°~110°之间,根据要求拍摄的靶面尺寸确定设备焦距参数;在靶标两侧高速数字摄像设备的拍摄视场边缘附近各设置一个方位标,设备站址与方位标和理论靶心距离接近,使导弹、靶标、方位标同时成像在高速数字摄像设备拍摄的序列图像中,图1为设备站址、方位标和靶面相对位置示意图。充分利用静态GPS大地测量精度高的特点,用方位标实时标校高速数字摄像设备的参数。通过设备站址、靶标、靶面和导弹相互间的空间几何关系,建立导弹脱靶量测量数学模型,对导弹过靶前后的序列图像进行处理得到导弹脱靶量。
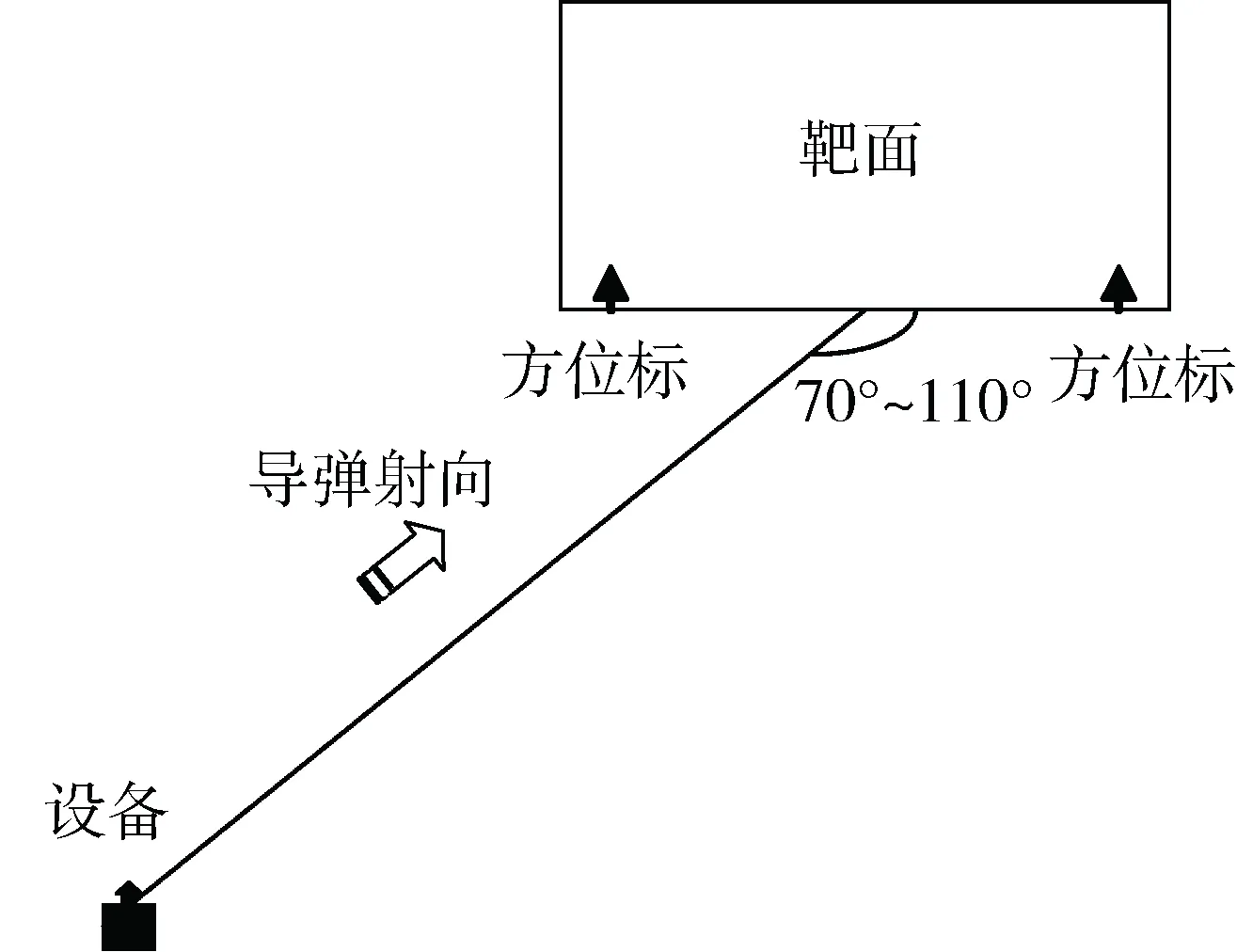
图1 设备站址、方位标、靶面相对位置示意图
1.2 计算靶标相对设备站址方位角、俯仰角和斜距[4]
输入已知参数:设备站址大地坐标S(B1,L1,H),靶标大地坐标T(B2,L2,H2),设备高度h。输出值:T点相对S点的方位角A,俯仰角E和斜距R。
1)修正设备高度
H1=H+h
式中:H为设备站址标石基准面大地高;h为标石基准面至设备视轴中心的垂直距离。
2)根据大地坐标求得2点的地心直角坐标系坐标X1,Y1,Z1及X2,Y2,Z2。
(1)
(2)
式中N1,N2为卯西圈曲率半径,N1=a/(1-e2sin2B1)1/2,N2=a/(1-e2sin2B2)1/2;a和e为对应椭球的长半轴和第一偏心率。a=6378137(m)(84坐标系参数),e2=0.0066943799013。
3)根据2点地心直角坐标系坐标求出S点与T点间空间斜距R。
(3)
4)根据2点地心直角坐标系坐标求出T点相对于S点的法线站心直角坐标系坐标x,y,z。
(4)
5)根据法线站心直角坐标系坐标x,y,z求方位角A,俯仰角E。
x≥0,z≥0
x<0
x≥0,z<0
(5)

y<0
(6)
为完成导弹脱靶量测量,需要测量方位标相对高速数字摄像设备站址的方位角、俯仰角和斜距参数,按照站址和方位标精度优于设备测量精度5~10倍要求,确定大地测量中距离精度应优于0.01m,角度精度应优于5″,由于大地测量采用GPS静态定位实现,这一指标可以达到。
1.3 计算修正设备高度后方位标数据
设设备高度为h,h为设备站址标石上表面至设备视轴中心的垂直距离,则修正设备高度h后方位标相对站址的俯仰角E和斜距R按式(7)和(8)计算(方位角不用修正):
(7)
(8)
式中:E01为大地测量给出的方位标相对站址俯仰角;R01为大地测量给出的方位标相对站址斜距。
分别计算修正后的方位标F1和F2的俯仰角和斜距。
2 建立导弹脱靶量测量数学模型
2.1 计算光学镜头焦距f
由已知的方位标夹角、像面对应的像素数和像元尺寸,计算镜头焦距f。先计算f初值,然后与像面倾斜角ω做3次迭代运算。
A2-A1=

(9)
式中:A2和A1为图像中右侧和左侧方位标的方位角,psc为像元尺寸,E0为设备俯仰编码器值,x2,y2,x1,y1分别为图像中右侧和左侧方位标的水平像素和垂直像素。
2.2 计算摄像机像面水平倾斜角
像面水平倾斜修正:指摄像机像面水平轴线与水平面的夹角ω。ω按式(10)计算,结果为正值时表示摄像机像面顺时针倾斜,结果为负值时表示摄像机像面逆时针倾斜。
ω=arctan
(10)
式中:f为设备光学镜头焦距,psc为像元尺寸,E2和E1为图像中右侧和左侧方位标高低角,x2,y2,x1,y1分别为图像中右侧和左侧方位标的水平像素和垂直像素,E0为设备俯仰编码器值。
2.3 修正摄像机像面倾斜
摄像机像面以左上角为原点,按式(11)和(12)计算,可得到修正摄像机像面倾斜,并将摄像机像面原点移至中心的某点像素值(px,py)。
(12)
式中:sx和sy为高速数字摄像机水平和垂直像素总数;px0和py0为目标(靶心和导弹)像素值,px和py为修正倾斜后的像素值,E0为设备俯仰编码器值。
2.4 过靶时刻的图像插值修正
利用导弹过靶前2帧和过靶后1帧的目标图像水平和垂直位移计算目标过靶平均速度VX和VY:
(13)
(14)

修正后的过靶时刻目标坐标按式(15)和(16)计算:
x(tT)=x(t)+(tT-t)×VX
(15)
y(tT)=y(t)+(tT-t)×VY
(16)
式中:tT为过靶时刻,x(tT)和y(tT)为过靶时刻目标特征点对应的水平和垂直像素值;x(t)和y(t)为过靶前一帧目标特征点对应的水平和垂直像素值;t为x(t)和y(t)帧对应的时间;VX和VY为目标过靶平均速度(带符号)。
2.5 计算目标偏离靶标的角度
利用大地测量提供的靶标相对设备站址的方位角、俯仰角和方位标的方位角、俯仰角确定靶标在图像中的位置,目标特征点(经式(11)和(12)修正摄像机像面倾斜后)坐标T(x(tT),y(tT)),按式(17)和(18)计算目标偏离靶标的角度ΔA和ΔE:
(18)
式中:x1和y1为方位标F1或F2经式(11)和(12)修正摄像机像面倾斜后的坐标;A1和E1为方位标F1或F2的方位角和俯仰角;A正和E正为靶标的方位角和俯仰角。
2.6 目标在靶面坐标轴投影点与站址斜距的计算
目标在靶面纵轴投影点相对站址斜距RX按式(19)计算:
(19)
式中:R正为靶标相对站址斜距;E正为靶标相对站址俯仰角;ΔE为目标偏离靶标的俯仰角。
设靶标相对站址方位角为A正,导弹射向方位角为A射,则设备的测向与靶面夹角δ按式(20)计算:
δ=A正-A射
(20)
目标在靶面横轴投影点相对站址斜距RY按式(21)计算:
(21)
式中:R正为靶标相对站址斜距;δ为靶标相对站址方位角与导弹射向方位角差;ΔA为目标偏离靶标的方位角。
2.7 目标方位和俯仰脱靶量的计算
方位脱靶量按式(22)计算:
ΔX=RX×cosδ×tan(δ+ΔA) -RX×sinδ(22)
式中:δ为设备的测向与理论靶面夹角,按式(20)计算;ΔA为目标偏离靶标的方位角;RX为目标在靶面纵轴投影点相对站址斜距。
俯仰脱靶量按式(23)计算:
ΔY=RY×cosE正×tan(E正+ΔE) -R正×sinE正
(23)
式中:ΔE为目标偏离靶标的俯仰角;E正为靶标相对设备站址俯仰角;R正为靶标相对设备站址斜距;RY为目标在靶面横轴投影点相对站址斜距。
2.8 脱靶量测量误差的估算






(24)

(25)
式(24)和(25)中其余符号含义与式(9)~(23)中含义相同。
3 编制计算软件及实际应用情况
高速数字摄像设备主要参数:最高拍摄帧频为1600帧/s,最高像面分辨率为1280×1024像元,像元尺寸为10μm,配备30~360mm连续变焦距镜头,IRIG-B时间码同步精度优于10μs ,方位和俯仰编码器测角精度优于160″,轴系误差优于180″。
输入已知参数:高速数字摄像设备的站址和靶标的大地坐标;设备高度;方位标相对高速数字摄像设备的方位角、俯仰角和斜距;导弹射向;摄像帧频周期;像元尺寸;高速数字摄像机水平和垂直像素数;俯仰编码器角度;过靶时刻。
计算结果:导弹方位和俯仰脱靶量。
3.1 导弹攻击目标为地面虚拟靶
高速数字摄像设备的拍摄帧频为800帧/s,像面分辨率为1280×1024像元,站址与靶面距离为280m,预定的摄录区域是80×80m,镜头焦距34mm。
导弹攻击目标为距地面XXm高的空中虚拟点,用脱靶量测量软件对高速图像处理,得到目标方位脱靶量和俯仰脱靶量与无线电脱靶量测量设备(脱靶量测量精度:1m)的测量结果误差小于0.8m。按脱靶量误差估算公式(24)和(25)计算得到的脱靶量测量误差小于0.13m。
3.2 导弹攻击目标为地面实体靶
高速数字摄像设备的拍摄帧频为1000帧/s,像面分辨率为1280×1024像元,站址与靶面距离为520m,预定的摄录区域是110×60m,镜头焦距60mm。
导弹攻击目标为长XXm,高XXm的楼房,该楼房前立面中心为预定攻击点,用脱靶量测量软件处理高速图像,得到目标方位脱靶量和俯仰脱靶量与用米尺测量的结果误差小于0.2m。按脱靶量误差估算公式(24)和(25)计算得到的脱靶量测量误差小于0.12m。
3.3 与大型精密光学测量设备远距离测量交会结果的比较
当2台大型精密光学测量设备的方位和俯仰测角总精度为10″、设备与靶标距离为10km、交会角度在60°~120°之间、俯仰角为0°时,按交会测量误差估算式(26),可计算出σx,σz,σy的误差在0.48m~0.84m之间,脱靶量测量精度低于基于单站序列图像的导弹脱靶量测量精度。
(26)
4 结束语
当导弹攻击的目标为地面目标,导弹过靶时刻已知或靶面为实体靶面时,采用1台带有IRIG-B时间码同步的高速数字摄像设备,合理进行布站设计,充分利用大地测量精度高的特点,在外场对高速数字摄像设备进行实时标校,减少轴系和测角误差对脱靶量测量的影响,建立导弹脱靶量测量数学模型,通过对导弹过靶序列图像的处理,在低精度跟踪架设备上实现了高精度的导弹脱靶量测量。
[1] 吕晓林,罗纯哲.基于多普勒效应的脱靶量测量技术应用[J].无线电工程,2010,(3):55~57.(LV X L,LUO C ZH. Application of Miss Distance Measurement Technology Based on Doppler Effect[J].Radio Engineering,2010,(3):55~57.)
[2] 于起峰,尚洋.摄像测量学原理与应用研究[M].北京:科学出版社,2009.(Yu Q F,SHANG Y. Videometrics: Principles and Researches[M].Beijing:Science Press,2009.)
[3] 李成,王小伟.空靶脱靶量测量方法研究[J].指挥控制与仿真,2010,(3):108~110.(LI CHENG,WANG X W. Research on Miss Distance Measurement for Airborne Target[J].Command Control & Simulation,2010,(3):108~110.)
[4] 蔺建英,陈克坚.测量设备站点安装对中误差修正方法[J].航天控制,2009,(2):84~87.(LIN J Y,CHEN K J. Aligning Error Correction Method for Measurement Equipment[J].Aerospace Control,2009,(2):84~87.)
Method of Missile-Target Miss Distance Measurement Based on Single Station Sequence Images
LIN Jianying1MA Haichao2
1. PLA Unit. 91245, Liaoning Huludao 125001, China 2. PLA Unit. 92941, Liaoning Huludao 125001, China
Amethodtomeasurethemissile-targetmissdistanceisgivenbytheuseofasmallandinaccuratehigh-speeddigitalcameraequipmentofsynchronizationwithIRIG-Btimecode.Themethodisavailablewhenthecrossingtargettimeofmissileisobtainedbythelaserorradioequipmentasthemissileattacksthetargetontheground.Firstly,thehigh-speeddigitalcameraequipmentinthemodeoffixedshort-rangeshootingisalignedalongthemissileheadingdirectionbeforethetargetsurface.Thenanazimuthmarkissetoneithersideofeachtarget.Themissile,targetandazimuthmarkareobtainedinthesequenceimagesofthehigh-speeddigitalcamerainthemeantime.Andthereal-timecalibrationoftheazimuthmarkisusedtocalibratetheparametersofthehigh-speeddigitalcameraequipment.Themathematicalmodelofmissiles’missile-targetmissdistancemeasurementsisestablishedbyusingthegeometryrelationsofthestationsite,thetarget,thetargetplaneandmissile,andthemissilemissdistanceisyieldedthroughtheimage-processingofthemissilebefore-and-aftersequenceimages.Comparedwiththeresultsofthelong-distanceintersectionmethodusingthelargeandpreciseopticalmeasuringequipment,amoreaccuratemissile-targetmissdistancemeasurementisobtainedinthesituationthatthetrackingaxis-basedaccuracy,shaft-positionencoderaccuracyandopticallensparametersrequiredaretensoftimeslowerthanthelargeandpreciseoptimalequipment.
Missdistance;Singlestation;Images;Measurement;Accuracy.
TJ760.6
A
1006-3242(2013)05-0041-05