浅谈变桨系统中的位置传感器
2013-08-16中国大唐集团新能源股份有限公司北京检修分公司轩辕晓东李宏斌
文/中国大唐集团新能源股份有限公司北京检修分公司 轩辕晓东 李宏斌/

1 前言
风力发电机组需要根据风速来确定桨叶的角度,通过改变桨叶的角度,来改变桨叶转子的转速和功率,进而获得稳定的输出功率。桨叶旋转角度在0°到90°之间。桨叶角度调节的执行机构有电机驱动(三套伺服电机通过减速器分别驱动三片桨叶运动)和液压驱动(一个液压缸通过一套曲柄滑块机构推动三片桨叶同步运动或三个液压缸通过三套曲柄滑块机构分别驱动三片桨叶运动)两种方式,两种驱动方式都需要传感器来实时监控桨距角,当采用电机驱动时,可以通过测量角位移来间接测量桨距角,当采用液压驱动时,可以通过测量线性位移来测量桨距角。
2 电动变桨旋转编码器的结构和原理
2.1 电动变桨编码器的位置和控制策略
轮毂里有三套电池盒和轴控制盒以及感应电机和减速机,在轮毂和机舱连接处有电气开关盒,通讯总线和电缆是靠滑环与机舱的主控制器连接的,目前,兆瓦级以上的大型风力发电机组大多采用电机控制桨叶的电动变桨距系统。
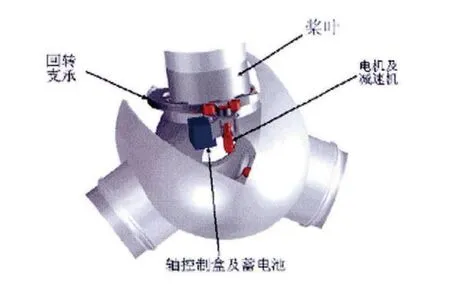
电动变桨距系统的结构图
每只桨叶都有单独的电机和减速机放置在轮毂处,每台共三套。其中电机后部安装了一只多圈绝对值编码器,常用SSI等串行通讯协议+增量信号或正余弦信号编码器,SSI信号连接到变桨控制器作为桨叶位置反馈,增量信号或正余弦信号连接到驱动控制器作为转子速度反馈。为了提供系统的可靠性,在桨根处也安装了一只多圈绝对值编码器。该编码器连接到变桨控制器作为桨叶位置的冗余反馈信号,常用SSI协议绝对值编码器。
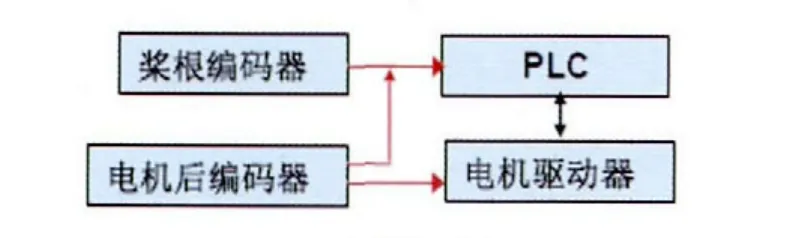
电动变桨控制策略框图
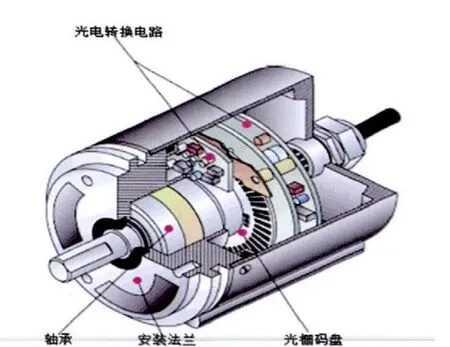
2.2 旋转式编码器的工作原理和基本结构
由一个中心有轴的光电码盘,其上有环形通、暗的刻线,有光电发射和接收器件读取,获得四组正弦波信号组合成A、B、C、D,每个正弦波相差90度相位差(相对于一个周波为360度),将C、D信号反向,叠加在A、B两相上,可增强稳定信号;另每转输出一个Z相脉冲以代表零位参考位。
由于A、B两相相差90度,可通过比较A相在前还是B相在前,以判别编码器的正转与反转,通过零位脉冲,可获得编码器的零位参考位。
绝对位置从码盘上读取,在码盘上,每一位对应一个码道,每个数位编码器对应一个输出电路,每一个通道都包含一个光源的接收器,每圈 (360°) 读数完成后,将重复读数输出。
绝对式旋转编码器GM400

内部基本结构图
变桨系统上应用的编码器安装在机头中并随其一起旋转,这就要求编码器要有很好的抗冲击振动能力,而风机工作在环境恶劣的野外,昼夜温差大,这就要求编码器坚固耐用,可靠性高,可靠性主要取决于绝对值编码器多圈计数的技术。
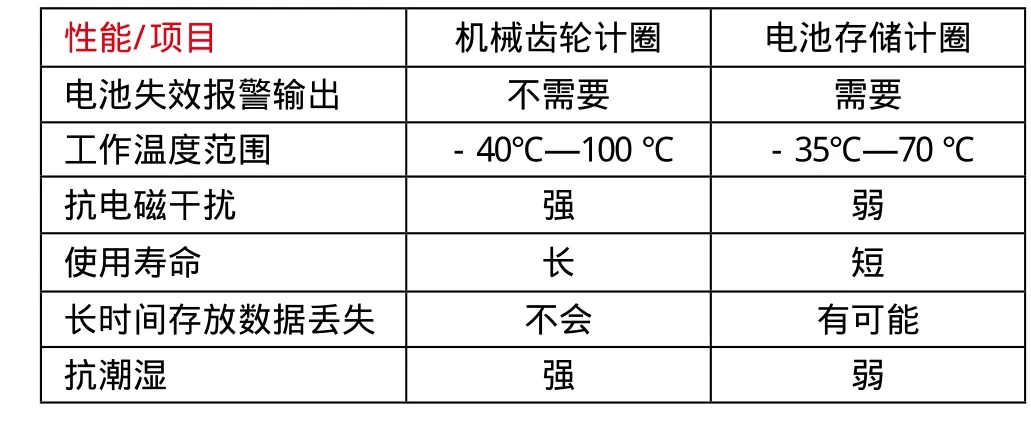
绝对值编码器多圈计数比较表
从上图可以看出,采用机械齿轮计圈技术,由于没有使用任何寿命器件,因而工作温度更宽,使用寿命更长。
信号输出有正弦波(电流或电压)、方波(TTL、HTL)、集电极开路(PNP、NPN)、推拉式多种形式,编码器的信号接收设备接口应与编码器对应。
3 液压变桨中位置传感器的结构和原理
3.1 液压变桨位置传感器的位置和控制策略
丹麦的风机制造企业普遍采用液压驱动方式,其液压变桨技术已经有超过25年的历史。每个变桨系统由一个与轮毂连接的液压缸组成,液压缸的活塞杆与叶根上的曲柄销连接。协助变桨缸运行的阀门装在分配管组上,用螺栓直接固定在液压缸上。
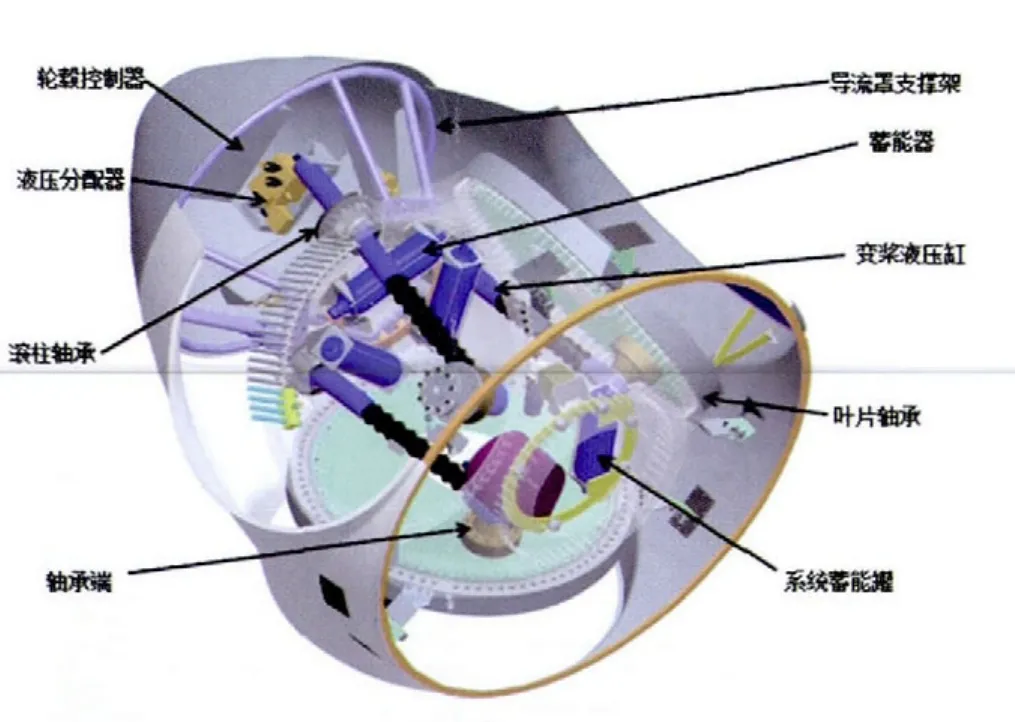
液压变桨系统结构图
PLC发出命令控制比例阀流量的大小来改变桨叶的变桨速度,比例阀的LVDT反馈实际位置,每个液压缸的后面都有一个线性位置传感器作为桨叶位置的反馈信号。
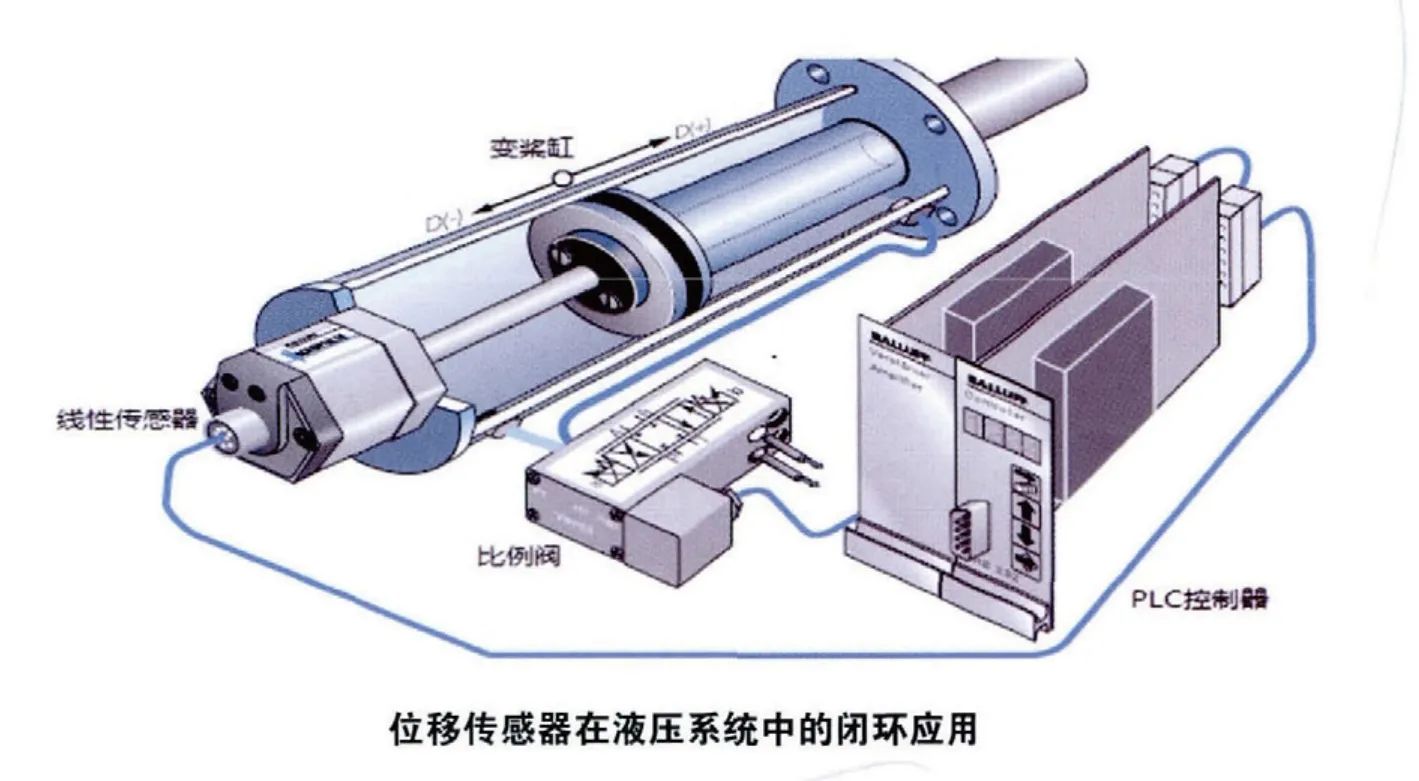
3.2 位置传感器原理与基本结构
电液伺服控制液压缸系统中,目前经常使用的线位移传感器有电感型、电位计式、电容式、光栅式和磁栅式等。
LVDT(Linear.Variable.Differential.Transformer)是线性可变差动变压器缩写。工作原理简单地说是铁芯可动变压器。它由一个初级线圈、两个次级线圈、铁芯、线圈骨架、外壳等部件组成。当铁芯由中间向两边移动时,次级两个线圈输出电压之差与铁芯移动成线性关系。
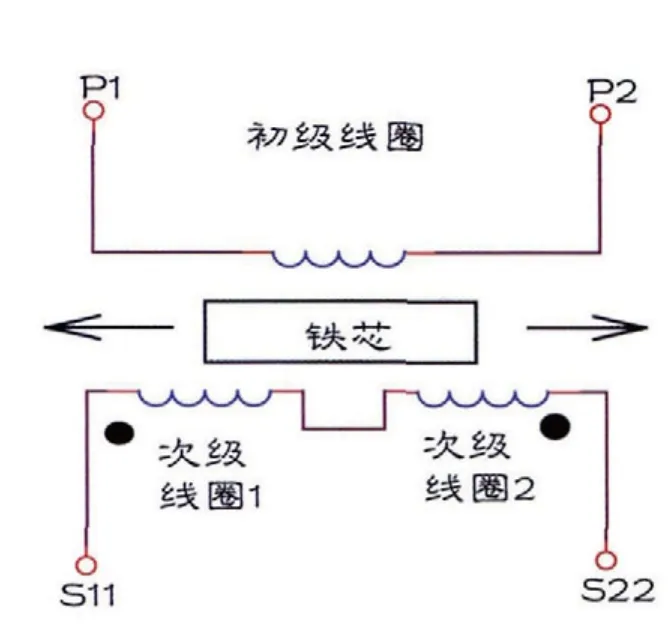
LVDT原理图
比例阀用LVDT
当初级线圈P1,P2之间供给一定频率的交变电压时,铁芯在线圈内移动改变了空间的磁场分布,从而改变了初、次级线圈之间的互感量,次级线圈S11,S22之间就产生感应电动势,随着铁心的位置不同,互感量也不同,次级产生的感应电动势也不同,这样就将铁芯的位移量变成了电压信号输出,由于两个次级线圈电压极性相反,输出电压为差动电压。
用LVDT精确测量双向比例阀的阀芯的位置,以便输出4-20mA的标准电流信号经过与预先设定的值进行比较后输出一个调节信号给与阀相连的电磁开关线圈,以便在闭环阀门控制系统中动态精确控制阀芯的位置。
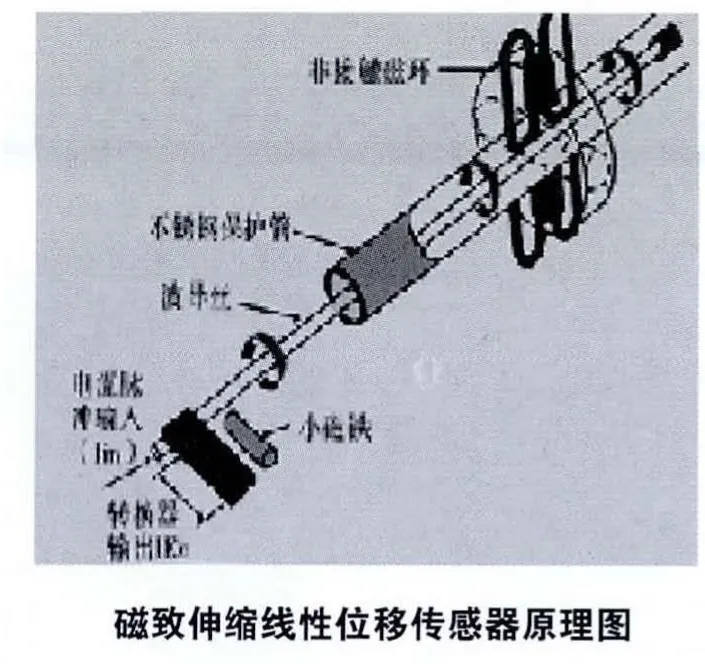
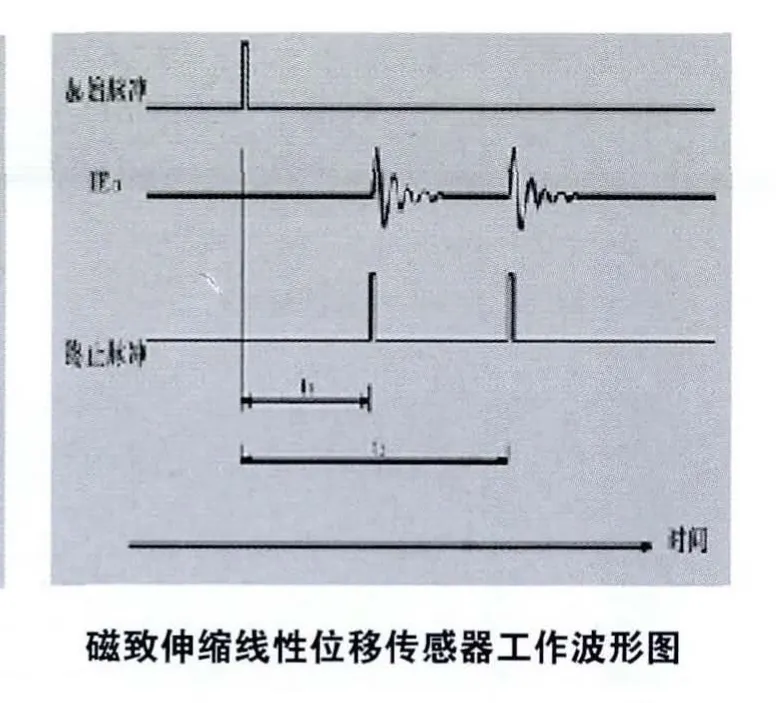
磁致伸缩线性位移传感器,是基于磁致伸缩原理用于测量线性位移的一种传感器,主要由磁致伸缩敏感元件(波导丝)、电子电路、保护外壳、非接触磁环组成,内部结构如图一所示。当传感器工作时,电路产生一个“起始脉冲”,此脉冲沿着波导丝传输,同时产生一个沿着波导丝方向的螺旋磁场,当此磁场与非接触磁环的磁场相遇时,波导丝产生磁致伸缩效应,即产生一个机械波沿着波导丝传向电路,此机械波以恒定速度V传输,电路部分有一个拾能机构将此机械波转换成一个微弱电信号IEo,经过放大后得到一个“终止脉冲”,通过计算得出“起始脉冲”与“终止脉冲”之间的时间差T,因此位移值L即等于VT。
3.3 微脉冲位移传感器巴鲁夫的调节
1)示教模式
用来设置一个新的零点和终点来替代工厂设定。首先将定位磁环移到新的零点,然后再移到新的终点,通过按压按键,保存相应的数值。
2)校准模式
可通过该方法校准新的零点和终点数值。当定位磁环无法移动到标准的零点或终点时,就有可能使用这种方法。移动定位磁环到新的起始和终止位置,然后按压按键调节显示的数值,直到到达期望的数值
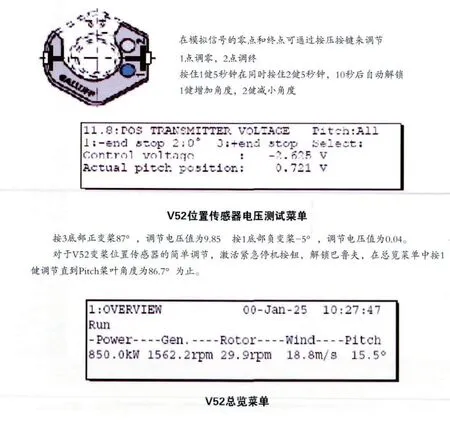
3)在线调节
编程功能允许用户在工作时(如闭环结构中)设置零点和终点。在设置过程中不会输出错误信号,因此不会出现液压缸动作不受控的情况。
4 结论
位置传感器可分为两种,角位移传感器和直线位移传感器。其中角位移传感器常用在电动变桨系统中,具有可靠性高、成本低、安装空间、机械间隙和长期维护很麻烦的特点。直线位移传感器常用在液压变桨系统中,具有工作原理简单、测量精度高、高分辨率、可靠性强、价格比同类型位移产品稍高的特点。
[1]维斯塔斯技术部,《V52总图》编号944659,2004,9.
[2]姜镇军.磁致伸缩液压缸位移传感器[D].大连理工大学,2007.
