基于NSCT的隧道裂缝图像检测
2013-08-07沈瑜
沈 瑜
(兰州交通大学,甘肃 兰州 730070)
0 引言
随着中国铁路建设的高速发展,许多特长隧道、双层隧道、大跨度扁平隧道、盾构隧道、沉管隧道、寒区隧道,以及高海拔隧道等相继建成,相应的隧道病害也日益突出。隧道的衬砌位于复杂的围岩地质之中,由于受到周围岩体压力、温度、收缩应力作用、腐蚀性介质作用、运营车辆的循环荷载等作用,导致隧道混凝土衬砌结构产生变形和裂缝,造成隧道更大灾害隐患出现。在工程中通常根据裂缝情况来评价其破坏程度,因此需要合适的检测方法来得到准确的数据,从而进行正确的分析。
2004年,邹轶群等提出了一种基于数字图像处理的表面裂纹检测算法[1]。张娟等分析了基于数字图像处理的路面裂缝识别与评价系统的工作原理[2]。2005年,刘清元等提出了判断混凝土裂纹的综合算法[3]。2006年,尹兰等利用了基于光测法的数字图像处理技术对混凝土表面裂缝宽度特征进行了测量和分析[4]。2012年,刘学增等采用图像增强预处理、循环迭代法裂缝区域提取、数学形态学修整、亚像素边缘检测等图像处理手段,提出隧道衬砌裂缝识别算法。
本文提出一种基于NSCT的隧道裂缝图像检测算法。因为NSCT具有如下特点:(1)NSCT可以从多方向性、多分辨率地对图像中的轮廓和纹理等方向信息进行稀疏表示。(2)NSCT变换是一种固定框架的多尺度多方向的变换,能够有效地避免参数设置问题,使结果更加稳定。实验结果表明,该算法在分割正确率和分割精度等指标上表现出良好的性能。
1 非下采样Contourlet变换
非下采样Contourlet变换(NSCT)是一种冗余变换,具有完全平移不变性,可以有效捕捉图像中广泛存在的几何特征。非降采样Contourlet变换(Nonsubsampled Contourlet Transform,NSCT)包括两个具有平移不变性的组件,它们是保证多尺度性质的非下采样金字塔滤波器(Nonsubsampled Pyramid Filter Bank,NSPFB)和保证方向性的非下采样方向滤波器组(Nonsubsampled Direcional Filter Bank,NSDFB)。
对于NSCT,首先,采用非下采样塔式滤波器组对图像进行多尺度分解。然后,使用非采样方向滤波器组对得到的各尺度子带图像进行多方向分解,见图1[4]。之后,将输入图像和一个二维滤波器进行卷积,得到原始图像的低频图像。原始图像与低频图像的差值为高频细节图像。最后,经过非下采样方向滤波器组,就得到了高频细节图像的方向性细节特征。图像在经过N级NSCT分解后,得到1+个与原始输入图像尺寸大小相同的子带图像,其中,lj为尺度j下的方向分解级数。

图1 NSCT结构图
2 算法实现
2.1 算法流程
本文算法的步骤见图 2。
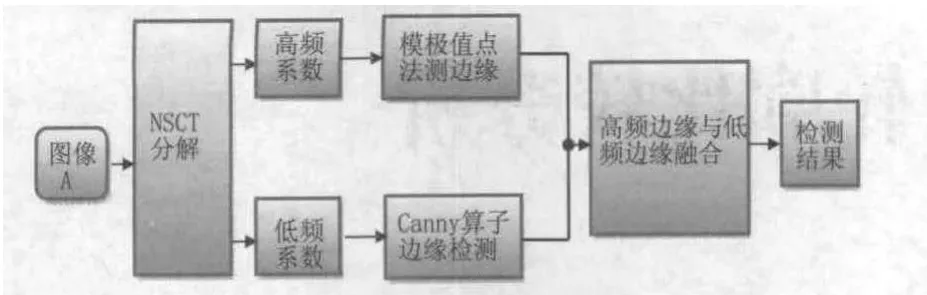
图2 算法流程
具体算法描述如下:
(1)采用NSCT变换,将图像分解成低频子带系数和高频子带系数。
(2)对高频子带图像进行边缘检测,采用模极值点法[5]。每个模极大值点检测只需将其与所在梯度方向上相邻2个像素的模值进行比较检测。通常,将每个区域对应的梯度中线方向认为是该子带系数的梯度方向。若沿着梯度方向上像素的模值均大于相邻2个像素的值,则将该点记为模极大值点;如不满足,则其为 0。
(3)对低频子带图像进行边缘检测。用Canny算子对低频子带系数进行边缘检测,得到低频边缘图像。
(4)将高频子带图像与低频子带图像融合后再细化[6]。由于NSCT变换的平移不变性,高频子带图像与低频子带图像可以很好的重合,所以只需要简单相加即可得到效果很好的边缘图像,再将图像细化成单像素点的边缘图像。
3 实验结果与分析
实验采用乌鞘岭隧道中拍摄的裂缝图像为例。检测车上的CCD线扫描相机拍摄高度为3m,拍摄角度平行,车速为60 km/h。分辨率为1 280×1 024。处理前,先将图像转化为大小为512×512的PNG格式的图像。
实验所采用三种已有的边缘检测算法与本文算法进行对比。这三种算法是Sobel算子、Canny算子和小波模极大方法。本文 NSCT变换 采用“9—7”滤波器进行尺度分解,采用“dmaxflat”滤波器进行方向分解。一共分解了 4层,第1层为低频层,不进行方向分解。高频层分别为 2、3、4层,其方向分解数依次取为 4、8、16。
在主观评价方面,主要通过边缘分割质量进行比对;在客观评价方面,对比误检边缘点数和品质因数,以证明本文算法的有效性。
实验结果见图3。
从图3可以看出:由于Sobel算子没有去噪,存在很多噪声点和边缘模糊。由于高斯平滑的模糊特性,Canny算子得到的各目标边缘大都存在定位抖动现象,同时受到斑点噪声的影响,存在多检边缘;小波模极大边缘检测方法由于降斑效果仍不理想和缺乏弱边缘连接,存在较多的孤立噪声点;本文方法得到的边缘则最为完整和平直,几乎没有定位抖动,噪声点也非常少。
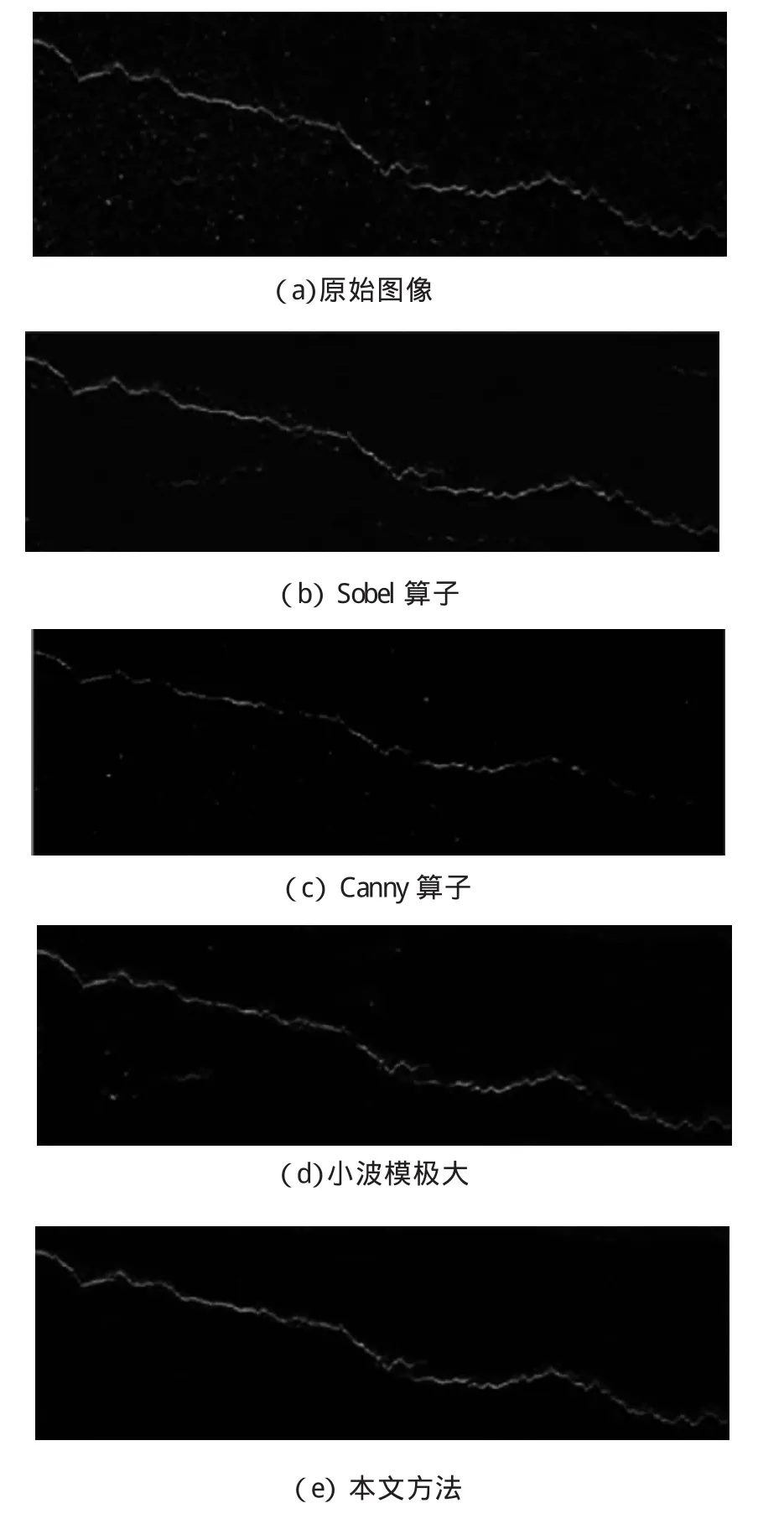
图3 各自边缘检测算法结果比较
不同方法边缘提取结果比较见表1。

表1 不同方法边缘提取结果比较
由表 1可知:Sobel算子误检边缘点数最多,定位准确性最差;Canny算子误检边缘点数较少,但定位准确性较差;小波模极大边缘检测方法定位准确性较好,但误检边缘点数较多;本文算法的误检边缘点数最少,定位准确性最好。
6 结论
相较于小波变换,NSCT变换具有更好的方向性和平移不变性。而且它可以更有效地检测纹理丰富的边缘,对高频子带图像进行检测,采用模极大值方法筛选系数,使得检测结果细节丰富,边缘定位准确。借助Canny算子的优越性能,对低频自带图像进行边缘检测,使得检测结果边缘稳定,完整连续。融合后的图像不仅避免了多重边缘,而且定位准确,误检边缘点少,是一种有效的隧道裂缝图像的边缘检测算法。
[1]邹轶群,侯贵仓,杨峰.基于数字图像处理的表面裂纹检测算法[J].微计算机信息:测控自动化,2004,20(4):80.
[2]张娟,沙爱民,高怀钢,等.基于数字图像处理的路面裂缝自动识别与评价系统[J].长安大学学报:自然科学版,2004,24(2):18.
[3]刘清元,谈桥.基于图像处理的混凝土裂缝的检测[J].武汉理工大学学报,2005,27(4):69.
[4]尹兰.基于数字图像处理技术的混凝土表面裂缝特征测量和分析[D].南京:东南大学土木工程学院,2006.
[5]王敏,李庆武,程晓轩.侧扫声纳图像的NSCT域模极大值边缘检测[J].计算机工程,2011(24):207-209.
[6]肖易寒,席志红,海涛,等.基于非下采样contourlet变换的图像边缘检测新方法[J].系统工程与电子技术,2011(7):1668-1672.