频率调制多普勒全场测速实验系统测试
2013-08-02王天宇张洪军何春生赵晓东
王天宇,张洪军,何春生,赵晓东
(中国计量学院 计量测试工程学院,浙江 杭州 310018)
多普勒全场测速(Doppler global velocimetry,DGV)技术是基于分子滤波原理,将多普勒频移由分子滤波器转换为光强变化,通过测量光强获得流场中示踪粒子的多普勒频移来测量平面内流动速度场.DGV技术通过测量光强的变化来测量频移,对测量中单个示踪粒子散射光光强要求不大;同时,由于被测流场的速度越高,粒子散射光的多普勒频移越大,测量就越准确,所以DGV在大尺度、高速流场测量方面优势明显[1-3].
DGV技术中通过测量光强的变化来测量频移,但是光强的变化不仅仅和多普勒频移有关,同时还会受到激光本身强度的变化以及粒子散射特性不同所带来的影响.为了解决这一问题,通常是采用一个参考相机来抵消掉除频移以外的其他变化.但是,这样会引入两个测量误差源:(1)对正误差,即信号相机和参考相机拍摄的图像在空间位置上存在偏差,像素点不能一一对应.当光强梯度变化大和像素分辨率低时影响会更大,测量误差在±2.3m/s以上[4];(2)分光引入误差,光的偏振使得分光率发生变化,即便是采用对偏振不敏感分光镜,偏振也会使分光率产生5%的偏差,从而带来测量误差[5].
1999 年,Müller等人[6]提出了频率调制DGV(frequency modulation DGV,FM-DGV),近些年逐步得到研究人员重视.FM-DGV技术中仅采用一个探头(CCD相机或光电二极管阵列),通过检测粒子散射光光强调制信号一、二次谐波幅值之比来获得多普勒频移,可以弥补传统DGV的技术不足,提高测量精度,降低设备成本[6-9].本文对于频率调制多普勒全场测速系统工作原理进行了分析,设计开发了采用CCD相机作为接收探头的FM-DGV实验系统,并且采用转盘测速试验验证方法的可行性.
1 FM-DGV工作原理
DGV的基本工作原理是通过测量流场中示踪粒子散射光的多普勒频移来测量流场速度.当激光照射到流场中,被移动粒子散射,就会产生多普勒频移,根据多普勒频移公式有[1]:

DGV使用一个窄线宽激光片光来照亮流场中的某一平面.示踪粒子散射光经分光镜分成两路片光,一路经过分子滤波器后由一个相机采集(称为信号相机和信号图像),另一路片光的图像则直接被另外一个相机——参考相机所采集,称为参考图像.分子滤波器的内部充满吸收分子,该分子具有和激光光谱相匹配的吸收带.这样就形成了一个具有有限长度斜边的透射率曲线(图1),通过滤波器的光谱强度和激光频率有关是分子滤波器的光谱透射率,Iv为通过滤波器后的光谱强度,Iv0为滤波器之前的光谱强度.实验过程中,选定基准频率后,其他频率就可以基于该基准频率建立多普勒频移函数ξ和滤波器透射率TR之间的关系.这样就可以通过信号图像与参考图像光谱强度的相对变化得到粒子移动引起的多普勒频移,而示踪粒子速度(即流动速度)可以由频移计算出.
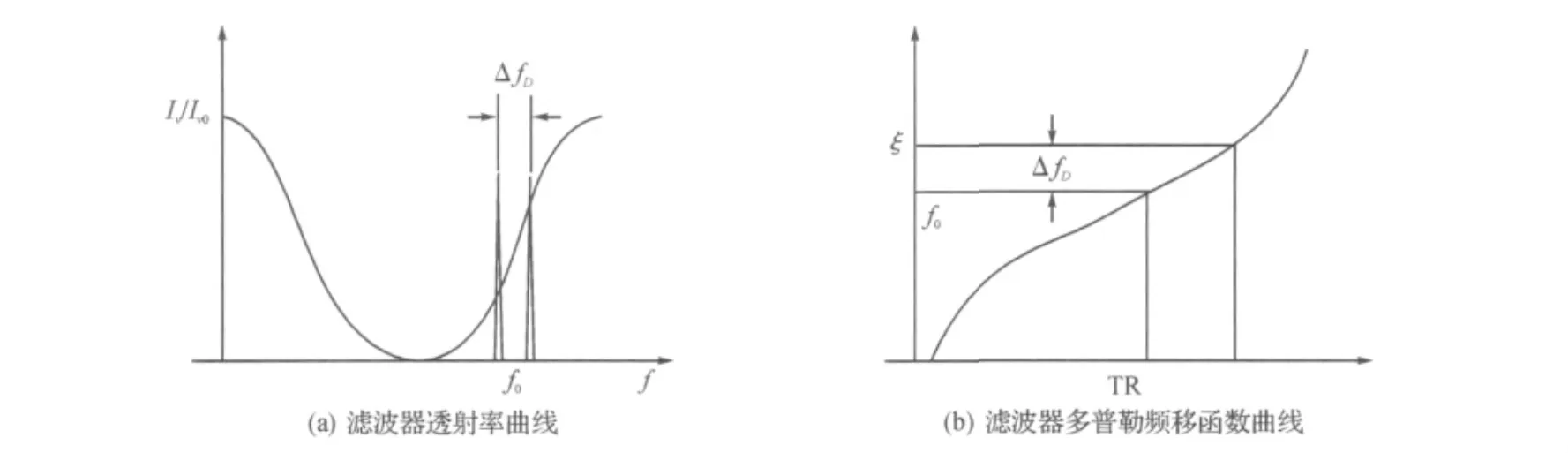
图1 滤波器的吸收谱线Figure 1 Filter absorption lines
传统DGV技术由于采用双相机分光技术,故不可避免地存在分光、图像不重合以及由参考相机引入的噪音等误差.FM-DGV系统中光源采用频率可调谐激光,假设其频率[6]

其中,fc为激光中心频率,fh为频率调制幅度,fm为调制频率.
由于分子滤波器的频率变化—光强变化的转换作用,故通过分子滤波器后,相机检测到的是光强调制信号(图2)[9].由于分子滤波器透射率曲线是非线性的,故光强信号中包含了各次谐波.图3给出的是典型光强调制信号及其能谱(仅显示一次和二次谐波).[9]当激光中心频率变化时,一、二次谐波的幅值随之变化,图4a示意性给出了一次谐波和二次谐波幅值随激光中心频率的变化曲线.很显然,粒子运动产生的散射光频移相当于激光中心频率发生变化,而这个变化将反映在两个谐波的幅值变化上.而这两个谐波幅值A1fm(Δf)和A2fm(Δf)都正比于光强,比值q(Δf)=的数值仅取决于中心频率的位置(图4b),因此,在FM-DGV中考察多普勒频移引起的比值q(Δf)的变化,即可得到多普勒频移,从而可以进行速度测量.
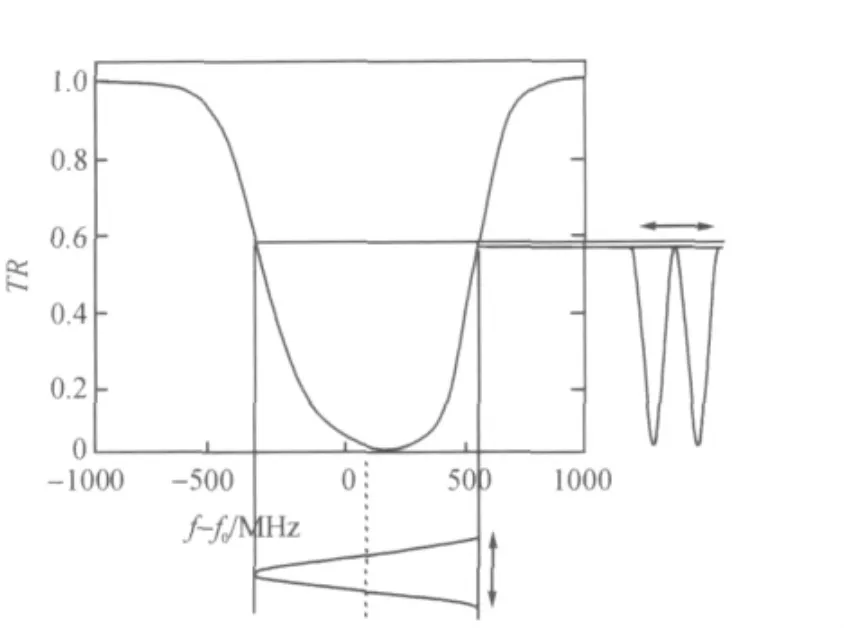
图2 产生调制信号的示意图Figure 2 Sketch of the generation of a modulated signal

图3 典型的调制信号时域与频域曲线Figure 3 Typical modulated signal in time domain and its amplitude spectrum
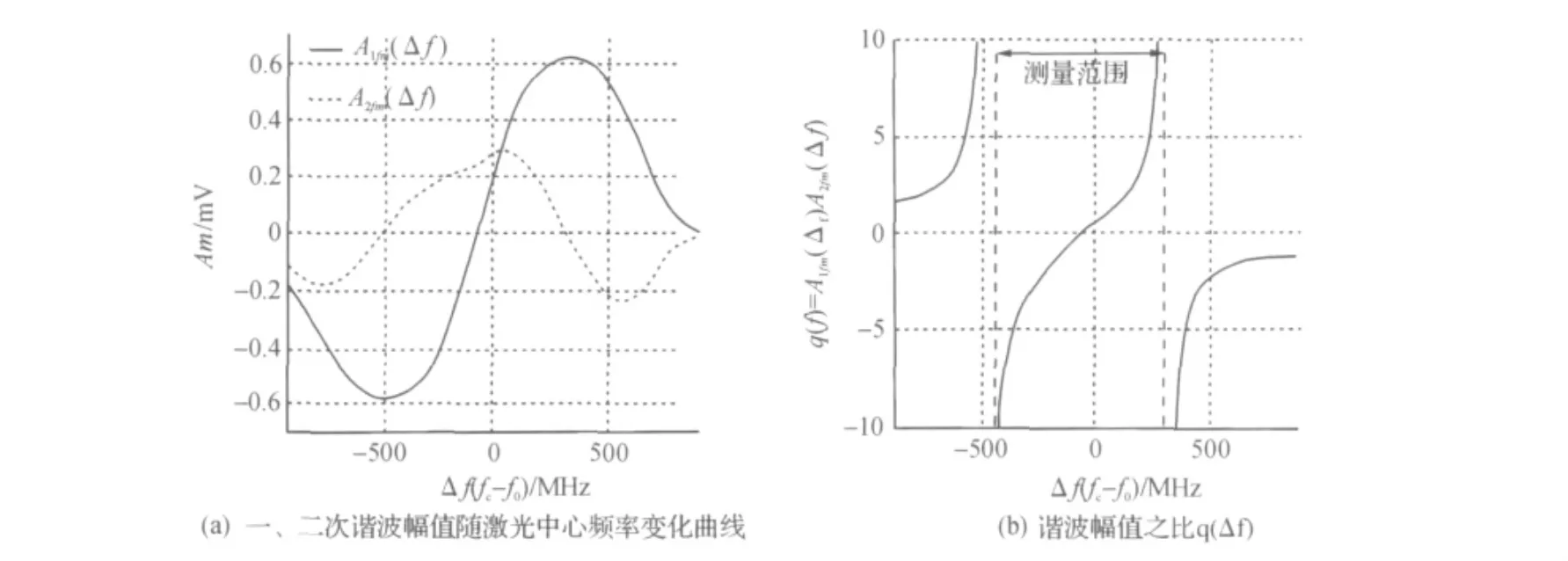
图4 一、二次谐波幅值关系曲线Figure 4 Curves of the relationship of the amplitudes of the first and the second harmonics
FM-DGV信号采集有两种方式,一种是采用雪崩光电二极管(APD)阵列,另外是采用CCD相机.采用APD时,激光频率连续调制,时间分辨率高,信号处理可采用快速傅立叶变换(FFT),由于APD阵列数量限制,这种方法适合于测量较小区域;如果进行大尺度流场测量,应采用CCD相机作为检测探头,基于频移键控技术(FSK),激光频率进行离散调制,根据Nyquist定理,最少需要采集三幅图像用于信号处理[7],时间分辨率取决于相机图像采集速率.数据处理的目的是对接收到的光强调制信号进行处理,得到该调制信号的一、二次谐波幅值之比,与标准曲线进行对比求得多普勒频移以及流速.对于周期性调制曲线,只需测量一个周期内的数据就可以.如图5,理论上知道(0)-(4)五个点的值就可以确定这条曲线.其中g(1)和g(3)数值可假定为相同,g(0)和g(4)也可假定为同一值,这样最少只需采集3幅图像就可以满足计算要求.此时[7]:

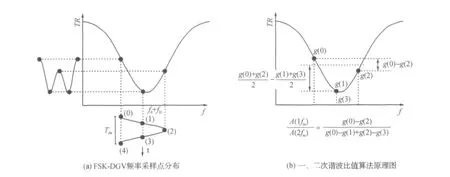
图5 FSK-DGV原理图[7]Figure 5 Theory of FSK-DGV[7]
2 实验系统
图6为FM-DGV实验测试系统示意图.与文献[10]中类似,该系统包括激光器、大小碘分子滤波器、片光源光学设备、CCD相机、辅助光学器件和转盘测试对象等.激光器发射一束激光,经分光镜分光,大部分进入流场用于速度场的测量,一小部分通过小碘池用于激光频率和功率监测.由CCD相机采集到流场散射光图像,图像再传输到计算机中进行处理.
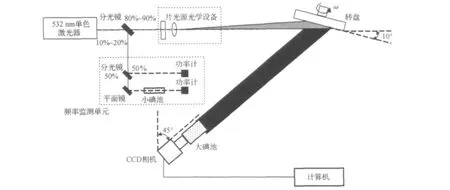
图6 实验测试系统Figure 6 Experimental system
2.1 激光器
DGV技术中对激光线宽、频率稳定性及功率稳定性要求都很高.本系统中使用的是半导体激光器,型号为SLM-532-50,该激光器产生连续激光,波长为532nm,最大输出能量为50mW,线宽小于1MHz.通过调谐温度来改变激光的频率,温度调谐范围约为30GHz.
2.2 碘分子滤波器
碘分子滤波器也称之为“碘池”或“吸收室”,是一个内部装有碘蒸气的由石英玻璃制成的圆筒,在圆筒的两侧分别加有光学玻璃窗口.大碘池的长度为150mm,直径为75mm.小碘池的长度为120mm,直径为25mm.为了保证圆筒两侧的光学玻璃窗口上不出现碘晶体,使用电热丝缠绕在筒体两侧对其进行加热,并用隔热胶带进行绝热处理,将圆筒温度保持在340~380K之间,温度控制精度为0.1K.采用TEC对从筒体主体上伸出来的侧壁进行温控,温度需要保持在310~325K.由于碘池吸收曲线很容易受到滤波器的侧壁的温度的影响,因此其温度控制精度需要精确到0.01K.
2.3 CCD相机
该系统采用了型号为BM-141的灰度相机,由JAI公司生产,相机的信噪比大于58分贝,可以存储8、10和12位的图像,有效像素为1392×1040,帧率为30.12f/s.本文采用的是8位图像存储.
2.4 转动圆盘
由于转盘速度稳定且调节方便,故选为DGV技术中常用的测试对象.本系统采用的转盘,半径R为100mm,最高转速达3500r/min,转速采用数字显示.为了保证转盘的转速与实际转速之间的准确性,采用精度级别为0.01级的高精度智能测速系统对转动圆盘在不同转速下的实际速度进行校验.测试结果显示其误差小于0.1%,是理想的测试对象.此外,为保证测试过程中激光的散射效果,需保证转盘表明平整.
3 实验结果和分析
3.1 频差与谐波幅值比关系曲线的标定
半径为100mm,转速为0~3500r/min的转盘被选为测量流场速度的实验对象.由于激光能量小,测试区域不能太大,转盘平面与入射光夹角为10°时片光在转盘上照亮的是一个条带,宽度大约20mm.图7中标示的矩形区域就是实验的主要测试区域.矩形长约50mm,下端距离转盘圆心35mm.

图7 转盘测试区域Figure 7 Measuring zone of the rotating wheel
标定过程中选取中心频率及其两侧间隔相同的频率点(这样的三个激光频率点为一组)进行测试,保证三个频率点都没有落在吸收井之外(参见图5),三个频率点之间的间隔为150MHz.以30 MHz为步长进行扫描测量.选取测试区域中心的5×5像素点平均值,根据公式(3)进行处理后得到频差与谐波幅值比关系的标定曲线,如图8.其中曲线拟和采用了3阶多项式拟和,曲线显示拟和效果较好.

图8 频率差与一、二次谐波幅值比标定曲线Figure 8 Calibration curve of the relationship between the centre frequency difference and quotient of the first and the second harmonics
3.2 转盘线速度测试
根据公式(1),测量的速度分量大小为:

式中θ为入射光与接收CCD之间的夹角.
根据所得速度分量可以推算出转盘在该点的线速度测量的速度v=vD/cosφ,其中φ为所测速度分量与线速度矢量之间的夹角.
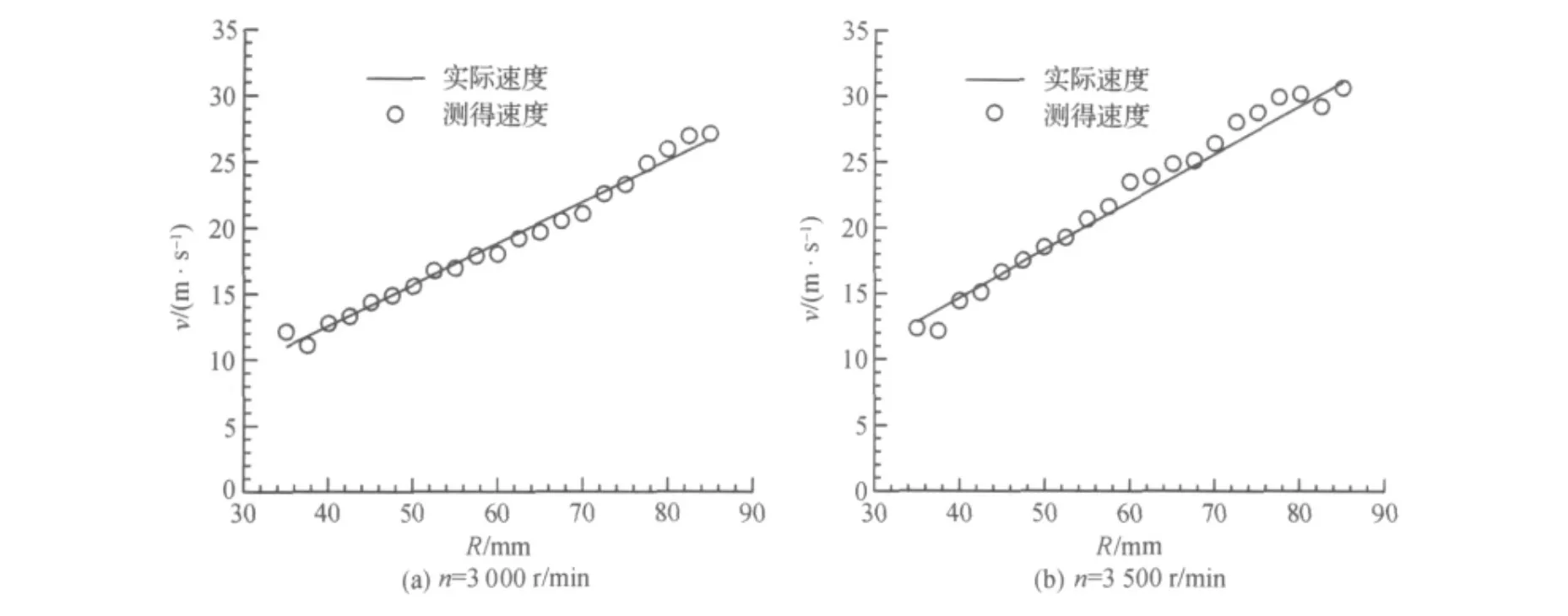
图9 转盘测试线速度沿半径分布结果Figure 9 Tangential velocity distribution with a radius
图9显示了沿径向的线速度分布测试结果.每个点上的数据是激光照亮的实验区域上横向上的点做平均后的结果.图中同时给出了根据转速n和半径位置r推算出的真实速度以便于比较.图9(a)和(b)分别为转速为3000r/min和3500r/min时的速度分布.两个结果中速度测量绝对误差最大值分别为1.16m/s和1.59m/s(对应的转盘线速度分别为10.99m/s和14.65m/s),都小于2m/s,最大相对误差分别为10.6%和11.6%(绝对误差与当地速度真值之比);速度测量误差均方根值为0.59m/s和0.91m/s.绝对误差数值对于DGV测量来说属正常范围,由于本研究中被测速度较小,因此相对误差比较大.从转盘线速度的测试结果与实际速度基本吻合这点来看,本FM-DGV实验测试系统能够正常工作,文中所采用实验方法、图像和数据处理方法是可行的.
另外,图9显示测量速度分布沿半径方向不是线性,中间区域与实际值吻合较好,而半径较小和较大的地方较差.分析其原因:一方面是因为标定曲线是取中间小区域平均值的计算结果,造成不同半径处误差数值不同;另一方面是测量时基点频率(即转速为零时的中心频率)设定值与标定时取值的不同造成的.因此,标定数据取当地值和提高中心频率确定的准度可以减小这些误差.这个问题将在另外文章中讨论.
4 结 语
本文对频率调制多普勒全场测速技术进行了介绍.在自行开发的采用CCD相机作为信号采集手段的频率调制多普勒全场测速实验系统上进行了初步测试实验.测试结果表明所开发系统能够正常工作,速度测量误差小于2m/s.为了减小测量误差,今后在实验方法方面还需进行进一步研究.
[1]张洪军,吕 进.多普勒全场测速技术的进展[J].力学进展,2007,37(3):428-442.Zhang Hongjun,Lv Jin.The progress of Doppler global velocimetry[J].Advances in Mechanics,2007,37(3):428-442.
[2]Bogusako M,Elliott G S.Property measurement utilizing atomic/molecular filter-based diagnostics[J].Progress in Aerospace Sciences,2005,41:93-142.
[3]Elliott G S,Beutner T J.Molecular filter based planar Doppler velocimetry[J].Progress in Aerospace Sciences,1999,35:799-845.
[4]Morrison G L,Gaharan C A.Uncertainty estimates in DGV systems due to pixel location and velocity gradients[J].Meas Sci Technol,2001,12:369-377.
[5]Meyers J F,Lee J W,Schawartz R J.Characterization of measurement error sources in Doppler global velocimetry[J].Meas Sci Technol,2001,12:357-368.
[6]Muller H,Lehmacher T,Grosche G.Profile sensor based on Doppler global velocimetry[C]//8th International Conference Laser Anemometry-Advances and Applications.Rome:University of Rome“La Sapienza”,1999:475-482.
[7]Muller H,Eggert M,Czarske J,et al.A single-camera Doppler global velocimetry based on frequency modulation[J].Experiments in Fluids,2007,43:223-232.
[8]Fischer A,Buttner L,Czarske J,et al.Investigation of time-resolved single detector Doppler global velocimetry u-sing sinusoidal laser frequency modulation[J].Measurement Science and Technology,2007,18:2529-2545.
[9]Fischer A,Buttner L,Czarske J,et al.Measurement uncertainty and temporal resolution of Doppler global velocimetry using laser frequency modulation[J].Applied Optics,2008,47(21):3941-3953.
[10]张洪军,何春生,赵晓东,等.多普勒全场测速系统实现[J].仪器仪表学报,2010,31(增刊):119-122.Zhang Hongjun,He Chunsheng,Zhao Xiaodong,et al.Development of a Doppler global velocimetry system[J].Chinese Journal of Scientific Instrument,2010,31(Supplement):119-122.