多无人机编队飞行气动耦合仿真
2013-07-25袁园闫建国屈耀红
袁园,闫建国,屈耀红
(西北工业大学自动化学院,陕西西安 710129)
0 引言
无人机编队飞行在作战时可以扩大侦察和搜索的范围,提高执行任务时的成功率和抗突发事件的能力。紧密编队飞行时可以减小整体的飞行阻力,提高气动效率、减少油耗,有效地增加编队飞机的航程和续航时间[1]。目前主要有两种研究方法:一种是通过建立数学模型来研究编队飞行时的气动耦合问题;另一种是通过风洞试验进行编队飞行测试得到相应流场数据。文献[2]首先量化了编队飞行中的气动优势,利用升力线理论与马蹄涡模型得出在鸟类编队飞行中跟随者的诱导阻力减小;美国NASA利用两架1/10的F-18C模型进行了风洞试验,结果表明阻力减少可达25%[1];文献[3]提出了一种将气动耦合问题融入到飞机六自由度运动分析中的方法,计算长机翼尖涡对僚机的动力学影响。上述理论数学模型缺乏仿真算例验证,风洞试验耗资巨大,试验成本高。
针对以上不足,本文提出了一种基于涡流模型分析和CFD仿真相结合的研究方法。利用CFD方法对不同飞行编队结构做流场分析,得到各编队结构下飞机的气动效率,并与涡流模型得出的最佳编队结构气动参数进行了比较。
1 无人机编队飞行气动耦合模型
1.1 问题描述
紧密编队飞行,指的是多机编队飞行中相邻两架飞机间的纵向距离小于飞机翼展的编队结构。长机飞行时产生的翼尖涡流场会对穿越流场或与其近距离飞行的飞机的气动性能产生很大影响,此种情况下,气动耦合及相对运动诱发的耦合将被引入编队动态特性[4]。这些耦合效应会使僚机的气动力及力矩发生变化。
不失一般性,以两架无人机编队飞行为例,使用图1的惯性坐标系表示双机编队飞行的几何模型,xi,yi,zi分别表示长机与僚机间的纵向间距、横向间距和垂直向间距。

图1 双机编队的几何模型
建立双机间气动耦合模型的主要目的是,寻找两架飞机的最佳编队间距,使僚机受到的升力最大,阻力最小,气动效率最大。
1.2 基于涡流模型的气动耦合分析
紧密编队飞行时,长机的翼尖涡会对僚机的气动性能产生影响,作用在僚机机翼上的上洗速度导致飞机飞行迎角的变化,这使得飞机的气动力发生了改变[3]。
定义Vi为僚机飞行速度(下标i代表僚机、i-1代表长机);WU为上洗速度;Li和Di分别为原升力、原阻力矢量。出现上洗气流后,僚机的飞行迎角增加,迎角增量可表示为:

式中,WUαi为僚机的无量纲平均上洗诱导速度;Δαi为僚机的飞行迎角增量。
如果假设飞行迎角足够小(α≤5°),则由于升力改变而引起的阻力增量表示为:

将上式两端同时除以动压和机翼面积Si,可得到无量纲的阻力系数增量:

僚机的升力系数增量来源于飞机飞行迎角的改变,由迎角和升力系数之间的关系可得其数值为:

式中,ci为僚机的升力线斜率。
长机的涡强表示为:

式中参数定义参见文献[4]。
飞机上、下翼面的压力差产生升力,上、下翼面的气流在飞机翼尖处汇合,这一压力差使得下翼面的气流会向上翻转,而上翼面的气流则向内收缩,这一过程不仅产生了上洗气流,而且使得翼尖涡的脱落位置产生了内移。由此可知翼尖涡的相对位置并不在翼尖,而是在翼尖稍微靠里的位置。由一种特殊的椭圆形升力环量分布机翼得出[5]:

式中,b'为僚机机翼有效翼展;b为机翼展长。
假设僚机机翼和垂尾上的诱导速度为均匀分布,基于Biot-Savart定律,得到僚机的无量纲平均上洗诱导速度为:
将式(5)、式(7)代入式(3),得到以编队队列中相邻两机相对位置坐标及两机参数表示的僚机阻力系数增量为:
式中,λi-1为长机机翼的展弦比;bi,bi-1为僚机、长机的机翼展长。
联立式(4)、式(5)和式(7),得到编队飞行时僚机的升力系数增量:

2 利用CFD进行气动耦合仿真
本文基于涡流模型分析了双机编队间的气动耦合效应,得到了僚机气动增量、两机相对位置及相对方位的数学模型。为了获得双机编队飞行时僚机的具体气动参数,利用CFD方法进行气动耦合仿真。
选择X-47B飞翼飞机作流场仿真分析,分别对其进行三维重建、网格划分和求解气动耦合参数。
2.1 无人机外形的三维重建
无人机的气动布局和三维外形是气动特性的决定因素,详细的气动特性分析与风洞试验都必须依赖于正确的飞机三维外形。根据飞机三视图及总体参数,使用CATIA对飞机进行逆向设计,重建目标体的三维外形。X-47B全机构型的外形如图2所示。

图2 X-47B全机外形图
2.2 网格生成
仿真模型采用了与真实飞机比例为1∶1的几何模型,用来模拟两架 X-47B的编队飞行。利用ICEM CFD软件进行网格划分,飞机表面网格如图3所示。

图3 飞机表面网格
2.3 仿真参数设置
考虑到空中加油时无人机在中低空飞行,并且X-47B飞翼飞机的巡航速度为Ma=0.5,巡航高度在1 500 m左右,设置Fluent求解器的仿真参数为:飞行高度H=2 000 m;Ma=0.5;大气压强p=79 495 Pa;绝对温度T=275.15 K;迭代残差精度取10-5。
3 仿真结果与比较
3.1 仿真结果
选择X-47B作为仿真机型,当飞机的飞行高度、飞行速度、迎角相同,且=2时,改变横向间距与垂直向间距,对式(8)采用MATLAB进行计算。
仿真结果得出:阻力系数增量ΔCDi在=π/4,=0时取最小值,此时僚机阻力减少量最大;升力系数增量Δ在=π/4,=0时取最大值,此时僚机升力增量最大。
此模型由僚机迎角变化推导出僚机阻力系数增量与升力系数增量的变化,根据文献[3]中提出的长机翼尖涡对僚机产生的平均上洗诱导速度的数学模型,得到编队队列中相邻两机相对位置坐标及两机参数表示的僚机阻力系数增量与升力系数增量。当阻力系数增量取得最小值,升力系数增量取得最大值时,得到编队飞行的最佳间距。即纵向距离xi=2b',横向距离yi=πb'/4,垂直向距离zi=0。
在涡流模型下得到了双机编队飞行时的最优间距,双机间距为纵向距离xi=33.11 m,横向距离yi=14.85 m,垂直向距离zi=0。
在此间距下,利用CFD方法求解僚机的升阻比。图4为计算网格,表1为仿真结果。

图4 紧密编队结构的计算网格
3.2 仿真结果比较
当α=0°时,以单无人机飞行的气动数据为比较基准,分析紧密编队飞行时僚机气动效率变化。表2为单无人机飞行时的仿真结果。

表2 单无人机飞行仿真结果
表1中α=0°时,飞机的升阻比为7.223 1,同样情况表2中为5.555 6,紧密编队结构下的升阻比大于单架飞机飞行时的升阻比,说明在外界条件相同的情况下,编队飞行时僚机的气动效率大于单架飞机飞行时的气动效率。迎角为1°,2°时,僚机的升阻比分别为11.178 3,13.366 7,表明小范围增大迎角时,升阻比增加,气动效率增大。
为了进一步验证无人机编队飞行时间距的最佳化,有效提高气动效率,增大了两机横向距离,保持纵向距离、垂直向距离不变,用CFD方法计算出相应的气动参数。
取双机间距为:纵向距离xi=33.11 m,横向距离yi=37.84 m,垂直向距离zi=0。表3为大距离编队飞行时的仿真结果。
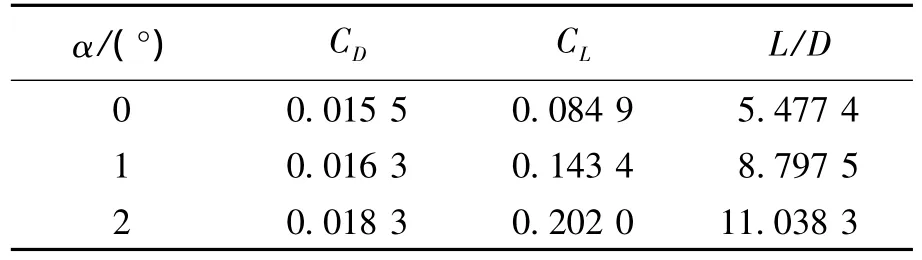
表3 大距离编队飞行时僚机的仿真结果
表3中α=0°时,飞机的升阻比为5.477 4,小于表1中的7.223 1,但与表2中的5.555 6相差不大。这说明大距离编队飞行时的气动效率与单架飞机飞行时基本相同,比紧密编队飞行的气动效率低。结果表明:此时双机间的横向间距很大,僚机脱离了长机翼尖涡的影响范围,大距离编队结构对僚机的气动性能几乎没有影响。
图5给出了两种编队结构下,僚机的升阻比随迎角变化的曲线。由图可知,在所有迎角下,紧密编队飞行时的升阻比大于大距离编队飞行的升阻比,迎角为0°时,升阻比从5.477 4提高到7.223 1。这说明飞机按由涡流模型得到的最佳间距飞行时,气动效率大大提高。

图5 升阻比对比
4 结论
本文通过研究无人机飞行时的尾涡模型,得出以下结论:同一迎角下,按最佳间距编队飞行时的僚机,相较于大距离编队飞行时的僚机,升阻比增大,气动效率提高。编队飞行两架飞机间距过大时,僚机会脱离长机翼尖涡流场的影响范围,无法从长机的尾涡流场获得气动性能上的益处。编队飞行时,编队间距的最优化,能使僚机气动效率最优,最大限度地节省能量。这种涡流模型可以应用到空中加油时的两机对接过程中,受油机与加油机相对位置的确定,最佳编队结构能提高受油机的气动效率,在受油机低油量飞行时最大限度地减少油耗,保证空中加油安全进行。
[1]Jennifer Hansen,Brent Cobleigh,Ron Ray.Vortex-induced aerodynamic effects on a trailing F-18 aircraft flying in close formation[C]//AIAA’s 1st Technical Conference and Workshop on Unmanned Aerospace Vehicles.Virginia:American Institute of Aeronautics and Astronautics,2002:1-24.
[2]Wieselsberger C,Beitrag Zur.Zeitschrift für flugtechnik und motorluftschiffahrt[J].Journal of Aviation Engineering and Motorized-Airship Aeronautics,1931,5(3):78-108.
[3]Atilla Dogan,Sriram Venkataramanan.Modeling of aerodynamic coupling between aircraft in close proximity[J].Journal of Aircraft,2005,42(7):941-945.
[4]刘成功.无人机仿生紧密编队飞行控制技术研究[D].南京:南京航空航天大学,2009.
[5]牟勇飚.无人机编队中的气动耦合研究[D].西安:西北工业大学,2006.
[6]韩占忠,王敬,兰小平.Fluent流体工程仿真计算实例与应用[M].第1版.北京:北京理工大学出版社,2008:45-90.
[7]Rachel M King,Ashok Gopalarathnam.Ideal aerodynamics of ground-effect and formation flight[C]//42nd AIAA Aerospace Sciences Meeting and Exhibit.Nevada:American Institute of Aeronautics and Astronautics,2004:1-11.
[8]Bangash Z A,Sanchez R P,Ahmedi A.Aerodynamics of formation flight[J].Journal of Aircraft,2006,43(7):907-912.