附有基线长度约束的模糊度快速解算方法*
2013-07-18王振杰乔永杰
王振杰,乔永杰
(中国石油大学(华东)地球科学与技术学院,山东 青岛266555)
0 引 言
在利用载波相位观测值进行GPS快速定位中,如何快速准确地解算整周模糊度,是一个关键的问题[1-2]。国内外很多学者利用某种特征作为约束条件来辅助确定整周模糊度,取得了一些成果[3-8]。Monikes等直接用基线长度约束条件,结合改进的LAMBDA方法进行了模糊度的快速确定[3]。韩保民等在GPS变形观测数据处理中,将2次观测的变形值不大以及各变形方向和大小可以比较精确预测等特征作为约束条件,提出了一种含约束条件的单频单历元GPS相位求解算法和模糊度搜索方法[4-5]。熊永良等针对建筑物变形监测的特点,提出了一种含变形区间约束条件的GPS变形监测单历元算法[6]。唐卫民等提出了附有基线长度约束的LAMBDA方法,能在基线长度已知条件下采用LAMBDA方法较高成功率地确定单频单历元数据的整周模糊度[7]。李博峰等利用坐标参数和模糊度参数的约束条件,通过改善模糊度浮点解的精度,减小整数模糊度的搜索空间,进而实现模糊度的快速解算[8]。上述快速解算模糊度的方法主要采取两种手段来提高固定模糊度的成功率:一是采用病态问题或秩亏问题的处理方法改善浮点模糊度解的精度,降低模糊度之间的相关性,利于快速解算整周模糊度[9-10];二是采用高效率的模糊度搜索技术,快速有效地固定模糊度。
超短基线的长度事先可以精确测量,采用基线长度作为约束条件,提出了一种附有基线长度约束的超短基线的模糊度快速确定新方法。以事先通过精确量距得到的超短基线长度作为约束条件,采用少数历元在LS估计基础上得出的模糊度浮点解周围建立模糊度搜索空间,利用基线长度作为约束条件在模糊度搜索空间内保留多组模糊度备选解,以单位权方差最小为原则,剔除错误的模糊度组合,快速确定正确的整周模糊度,实现基线向量的快速解算。
1 附长度约束的模糊度解算方法
1.1 双频相位差分观测方程
在GPS超短基线处理中,一般采用消除了大气延迟误差和钟差误差的双差观测值。设某历元两台双频GPS接收机可共视颗GPS卫星,则可以组成个载波相位双差观测方程,经过线性化后的双差观测方程可以简写为

式中:i为历元号,Ai为k×3维的基线向量系数矩阵;B为k×k维的模糊度向量系数矩阵;Xi为基线向量改正值组成的向量,Xi=(δXδYδZ)T;N为k维整周模糊度向量;Li为k维双差观测值向量,它是双差实测值与计算值之差;Δi为k维真误差向量;观测值的权阵为P,它是k×k维的方阵。
设这两台GPS接收机连续有n1个历元共视了这颗卫星,则这n1个历元的总的双差观测方程为

即写成

式中:A为n×m维(n=k×n1,m=k+3)系数矩阵;Y为m维待估参数向量;L为n维双差观测值向量,其权矩阵为Pn,Pn=In1⊗P,Δ为n维真误差向量。
根据式(3)组成法方程,得到LS解:

1.2 附有约束的整周模糊度快速解算方法
对于超短基线,当基于LS估计求得的模糊度浮点解在一定的精度范围内时,在模糊度浮点解的周围建立模糊度搜索空间,可以利用基线长度约束条件在搜索空间中进行整周模糊度的搜索。基于以上思路,采用一种简单实用的新方法来快速确定整周模糊度。

在Nb的每一个模糊度参数Nbi的±a周内(a一般小于5)确定整周模糊度的搜索空间∑N1,则搜索空间∑N1中包含有(2a+1)k个可能的模糊度组合,即:

在搜索空间内对每一组可能的整数模糊度依据最小二乘原理都可以求出一个基线长度F,与精确钢尺量距方法得出的基线长度真值F0相比较。根据:

式中,δ为一个常量,其大小根据载波相位的精度和基线长度来定,一般对于超短基线,如果模糊度正确,利用载波相位观测值计算出来的基线精度是mm级的,计算基线长度与实际基线长度之差不会超过1cm,因此,δ常取1cm.
在式(6)基础上,根据式(7)的约束条件,可得出l个可能的最佳模糊度组合∑N2为

式中,i=1,2,…,l.
由于式(7)约束条件的作用,式(8)∑N2中包含的模糊度个数要少于式(6)∑N1中包含的模糊度个数,利于快速正确的固定模糊度。
根据模糊度的单位权方差最小的原则解算正确的模糊度,即

式中:Na为正确的模糊度;PNc为模糊度的权阵。根据式(9)可以求得最终的模糊度最佳组合Na,进而可求得正确的基线长度。
2 算例及分析
采用2011年4月27日观测的由三条超短基线构成的微小等边三角形GPS网,三条基线分别为:A-B、B-C、C-A,如图1所示。观测时长为1h,采样率为1s,截止高度角为15°,设计等边三角形边长为2m.基准卫星为PRN-15,参考卫星为PRN-9、PRN-27、PRN-21、PRN-18,得到的四个双差卫星对为:15-9、15-27、15-21、15-18.
用GAMIT软件和传统的LAMBDA方法处理1h的观测数据,得到三条基线的基线长度和正确的整周模糊度,计算结果如表1所示。将其作为真值,新方法计算得出的基线长度和整周模糊度与

图1 微小等边三角形GPS网
其相比较。
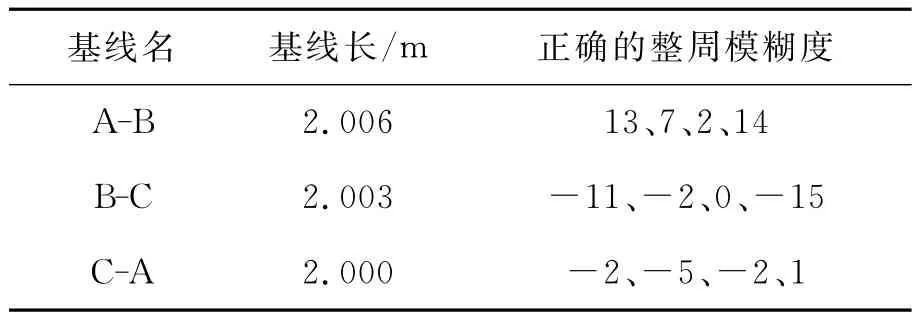
表1 基线长与正确的整周模糊度
提出的新方法采用MATLAB编程实现,进行模糊度的快速固定。分别处理三条基线不同历元数的观测数据,其中取a=2,得到整周模糊度以及基线长度,计算结果如表2所示。

表2 不同历元固定的整周模糊度及对应的基线长度
从表2的计算结果可以看出:
1)当处理少数历元时,比如50个历元(50s)以内的数据时,由于模糊度浮点解精度不高,造成确定出的模糊度搜索空间可能不包含正确的模糊度,从而固定模糊度错误或搜索不到正确的整周模糊度。需要说明的是:新方法加了式(7)的基线长度约束,计算得出的基线长度与正确值满足式(7)要求时,并不一定说明正确地固定模糊度,如基线A-B 10、40个历元时的处理结果。
2)当处理历元达到50个(50s)以上时,采用该方法得出的模糊度搜索空间中,包含有正确的整周模糊度组合,整周模糊度能够正确固定,进而得出正确的基线解。
3)算例中采用搜索空间±2周是依据模糊度的浮点解的精度来确定的,一般对于采样间隔较小的超短基线来说,在取整后的浮点解的±2周内建立模糊度搜索空间,能够在较短的时间内完成整周模糊度的固定。算例中,当采用50s数据即50个历元时,可以得到正确的整周模糊度解。
3 结 论
通过理论分析和实例验证,可以得出如下结论:
1)在双频载波相位超短基线处理中,采用附有基线长度约束的模糊度解算新方法只需少数历元就可以快速确定整周模糊度,能够实现GPS基线向量的正确解算。该方法简单有效,能在短时间内准确地固定整周模糊度。该方法在GPS超短基线处理以及运动载体的测姿定向中具有一定的应用价值。
2)本文方法与整周模糊度的浮点解的精度有很大的关系。采用最小二乘法得到模糊度的浮动解,如果模糊度浮点解的精度不高,模糊度搜索空间会依情况增大,可能会丧失该方法的优越性。如何采用正则化的方法来改善模糊度的浮动解,将在后续文章中进行讨论。
[1]周忠谟,易杰军,周 琪.GPS卫星测量原理与应用[M].北京:测绘出版社,1997.
[2]HOFMANN-WELLENHOF B,LICHTENEGGER H,WASLE E.GNSS-Global navigation satellite system GPS,GLONASS,Galileo &more[M].New York:Springer-Verlag,2008.
[3]MONIKES R,WENDEL J,TROMMER G F.A modified lambda method for ambiguity resolution in the presence of position domain constraints[C]//ION GNSS 18thInternational Technical Meeting of the Satelitte Division,Long Beach,CA,2005:81-87.
[4]韩保民,欧吉坤.一种附约束的单频单历元GPS双差相位解算方法[J].测绘学报,2002,31(4):300-304.
[5]韩保民,欧吉坤,成 枢,等.一种适合单频接收机的GPS单历元相位求解算法及其在开采沉陷观测中的应用[J].煤炭学报,2002,27(5):479-482.
[6]熊永良,黄丁发,张献洲.一种可靠的含约束条件的GPS变形监测单历元求解算法[J].武汉大学学报·信息科学版,2001,26(1):51-57.
[7]唐卫民,孙红星,刘经南.附有基线长度约束的单频数据单历元LAMBDA方法整周模糊度确定[J].武汉大学学报·信息科学版,2005,30(5):444-446.
[8]李博峰,沈云中.附有约束条件的GPS模糊度快速解算[J].武汉大学学报·信息科学版.2009,34(1):117-121.
[9]WANG Zhenjie,CHRIS R,SAMSUNG L.Single epoch algorithm based on tikhonov regularization for deformation monitoring using single frequency GPS receivers[J].Survey Review,2006,38(302):682-688.
[10]欧吉坤,王振杰.单频GPS快速定位中模糊度解算的一种新方法[J].科学通报,2003,48(24):2572-2575.
