基于当前统计模型的TCAS/ADS-B组合监视系统数据融合算法❋
2013-06-27徐亚军何桂萍
徐亚军❋❋,何桂萍
(中国民用航空飞行学院航空工程学院,四川广汉618307)
基于当前统计模型的TCAS/ADS-B组合监视系统数据融合算法❋
徐亚军❋❋,何桂萍
(中国民用航空飞行学院航空工程学院,四川广汉618307)
比较了空中交通警戒与防撞系统(TCAS)和自动相关监视系统(ADS-B)的监视原理,构建了TCAS/ADS-B组合监视系统,对组合监视系统的监视区域进行了划分。采用当前统计模型的数据融合算法,得到了优化的TCAS局部轨迹估算和优化的ADS-B局部轨迹估算,以及优化的融合轨迹估算。仿真结果显示,最大优化融合位置误差为100 m,证明该组合监视系统可以提高目标飞机轨迹估算的准确度,从而提高TCAS的监视精度。
TCAS;ADS-B;组合监视;局部轨迹;数据融合;融合轨迹;当前统计模型
1 引言
对飞机之类的机动目标进行状态估计时,目前常用的方法有3种:Singer模型、当前统计模型和交互式多模型跟踪模型[1-2]。
Singer模型的许多参数需要预先设定,而不是通过在线学习得到,因此它本质上是一种先验模型;另外,Singer模型假定目标加速度在任何时刻的均值都为零,是一种零均值时间相关模型,这种假设不适用于飞机飞行时的实际情况[1]。
交互式多模型跟踪模型是假定两个或两个以上的模型,给每一个模型建立一个滤波器,计算每一个模型的正确概率,然后求它们的加权和。该模型计算量大,实时性差,不适用于民航飞机对监视实时性的要求[1]。
当前统计模型在估计目标状态的同时,还可辨别出加速度的均值,从而实时地修正加速度分布,并通过方差反馈到下一时刻的滤波增益中,实现了闭环自适应跟踪。在当前统计模型中,认为加速度是非零均值时间相关的,均值为“当前”加速值[2]。
所以,当前统计模型和飞机的实际运动状态相符。所以,本文选择基于当前统计模型的数据融合算法来对目标飞机的状态和轨迹进行估算。
2 TCAS的监视和防撞原理
TCAS系统向周围飞机的ATC应答机发送询问信号,并通过接收其他飞机上ATC应答机的应答信号来获取其他飞机的高度、距离和方位信息。安装TCAS的飞机称为本机,周围安装有ATC应答机的飞机称为目标飞机。
利用来自其他飞机上应答机的信息和本机的高度信息,TCAS计算机能够计算出目标飞机和本机之间的相对运动,并计算目标将如何在最接近点(CPA)贴近本机。根据目标距离本机CPA的时间,TCAS确定了两个保护区域:交通咨询(Traffic Advisory,TA)区域和决策咨询(Resolution Advisory,RA)区域。TA区域的时间范围为20~48 s,RA区域的时间范围为15~35 s[1-3]。TA和RA的具体时间随高度的增加而增加。
当目标飞机穿越TA保护区域时,TCAS在交通信息显示器上显示目标飞机的位置;当目标飞机穿越RA保护区域时,TCAS除了在交通信息显示器上显示目标飞机的位置外,还向机组发出音响和目视的防撞措施[3-5]。
空中交通警戒与防撞系统和空中交通管制系统在相同的频率上工作,造成了无线电信号的拥堵和干扰。为了减少信号的拥堵和干扰,目前采取的措施是降低TCAS的询问重复频率。该措施造成的影响是TCAS对轨迹的探测缺乏实时性,并造成TCAS对轨迹运动趋势的估计不够准确,进而造成TCAS对冲突的预计能力和防撞的可靠性降低[3-4]。
3 ADS-B的监视原理
广播式自动相关监视系统(Automatic Dependent Surveillance-Broadcast,ADS-B)允许飞机对周围的飞机和附近的地面台站周期性地广播其状态矢量(水平位置和垂直位置、水平速度和垂直速度),以及其他的信息。所以,ADS-B可以提供更好的情景意识[6]。
但是,ADS-B是一种非独立的监视系统,该系统的监视效果依赖于机载导航设备和信息发送设备的可靠性,比如,ADS-B一旦丧失了为其提供位置报告的GPS信号,将会丧失探测能力。ADS-B也是一种协同工作的监视系统,因为该设备必须接收其他飞机ADS-B信息才能完成监视功能。鉴于以上原因,联邦航空局(Federal Aviation Administration,FAA)和美国国家宇航局(National Aeronautics and Space Administration,NASA)一直都在调查使用ADS-B系统支持TCAS,即TCAS/ADS-B组合监视防撞系统的适用性。目前有更多的专家和学者则提出了将ADS-B和TCAS组合,形成组合型监视与防撞系统[6-7]。
4 TCAS和ADS-B的比较
TCAS只能通过接收其他飞机应答机的信息后才能计算目标飞机的位置,并根据目标目前和历史的位置和速度信号才能计算冲突,所以,冲突的预报能力会随着交通流量的增加而变得很复杂。ADS-B直接从广播信号中获得目标的位置和速度信息以及意图等信息,所以,容易计算出目标的轨迹趋势。根据轨迹趋势再计算冲突将在相位上有所提前。
TCAS在1 030 MHz的频率上发送询问信号,并在1 090 MHz的频率上接收其他应答机的信号,ADSB也在1 090 MHz的频率广播信息,所以,TCAS可以接收到ADS-B的广播信号,这为TCAS/ADS-B组合监视和防撞系统的研究提供了基础。
5 TCAS/ADS-B组合监视区域
在TCAS/ADS-B组合监视系统中,TCAS可以利用ADS-B的广播信息直接获取目标飞机的位置和速度,而不需要对应答机进行询问,所以,可以降低TCAS的询问重复频率,减少无线电干扰,在保持TCAS基本防撞功能的基础上,还提高了监视精度。
TCAS的最大水平监视范围为40 n mile,在本机的正前方,侧面和后面的监视范围更小[3]。ADS-B的监视范围大于等于100 n mile,而且在所有方向上都一样[6-7]。TCAS和ADS-B的监视范围如图1所示。
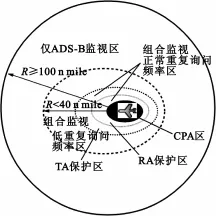
图1 TCAS/ADS-B组合监视系统的水平监视区域Fig.1 The horizontal surveillance range of TCAS/ADS-B integrated surveillance system
TCAS/ADS-B组合监视系统的监视范围可以划分为两个区域,即仅ADS-B监视区域和TCAS/ADSB组合监视区域。仅ADS-B监视区域介于ADS-B监视区域和TCAS监视区域之间,TCAS/ADS-B组合监视区域位于原来TCAS的监视区域之内。
TCAS/ADS-B组合监视区域又分为低询问重复频率区域和正常询问重复频率区域。在TCAS原来的监视区域和TCAS保护区域之间,TCAS以1/10 Hz的重复频率询问周围的应答机,该区域称为组合监视低询问重复频率区。在TCAS的TA保护区域和TCAS的RA保护区域之间,TCAS以1 Hz的重复频率询问周围的应答机,该区域称为组合监视正常询问重复频率区[3]。
在仅ADS-B监视区域内,ADS-B可以通过目标飞机上ADS-B系统广播的信息直接获取目标飞机的位置、速度和意图。使用位置和速度信息,可以对目标飞机的状态矢量和位置进行估计。
当目标飞机进入TCAS/ADS-B组合监视区域内时,TCAS首先以1/10 Hz的低询问重复频率进行询问。在此期间,TCAS的数据用于证实ADS-B的信息,证实的方法是先比较TCAS的最近数据和ADS-B的最近数据,然后再对两种数据进行融合,并获得融合之后的状态矢量。
当目标飞机进入到TCAS的TA保护区域,或TCAS的RA保护区域时,TCAS将恢复其正常的询问重复频率,即1 Hz。在此期间,TCAS的实时数据和ADS-B的实时数据进行融合,并准确估算目标飞机的状态,再利用ADS-B广播信息中的意图信息,准确估算目标飞机的位置,并将目标飞机的位置信息发送到TCAS的决策器中,使TCAS系统发出目视和音响的防撞警告。
TCAS/ADS-B组合监视系统的信号处理流程如图2所示。
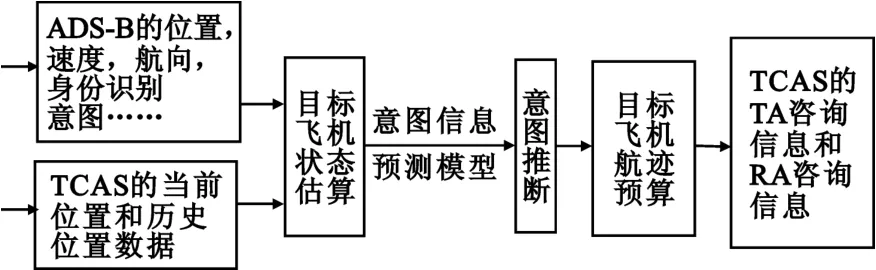
图2 TCAS/ADS-B组合监视信号处理流程Fig.2 The signal processing flow of TCAS/ADS-B integrated surveillance system
按照这种方法构建的TCAS/ADS-B组合监视系统中,最终的融合轨迹将发送到TCAS计算机的决策器中,ADS-B只用作TCAS的输入接口,向TCAS提供外部信息,以提高TCAS的监视精度,降低TCAS的虚假警告和漏警。
6 数据融合算法
6.1 TCAS/ADS-B组合监视系统数据融合系统结构
TCAS/ADS-B组合监视系统数据融合框图如图3所示。这是基于当前统计模型的数据融合结构框图,采用反馈回路的目的是提高状态和轨迹的估计精度[2]。
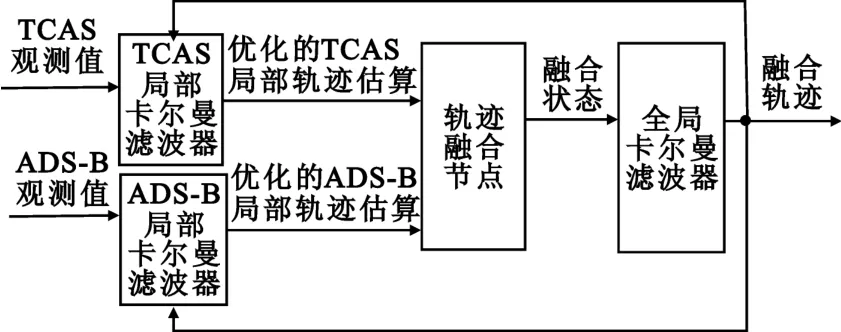
图3 组合监视系统数据融合框图Fig.3 Data fusion block diagram of the TCAS/ADS-B integrated surveillance system
在监视的第1阶段,即在TCAS原来的监视区域和TCAS保护区域之间。在这一阶段主要用TCAS监视数据验证ADS-B广播信息,将最近的有效的TCAS观测值和ADS-B观测值做比较,采用内插法将低频TCAS观测值插入与之时间对齐的ADS-B广播数据,并与之融合得到融合航迹。
在组合监视的第2阶段,采用了TCAS局部卡尔曼滤波器和ADS-B局部卡尔曼滤波器,以获取优化的TCAS局部轨迹和ADS-B局部轨迹。优化后的TCAS局部轨迹和ADS-B局部轨迹送到全局卡尔曼滤波器中进行融合处理,以获取融合后的目标飞机轨迹,并提高整个组合监视系统的精度和可靠性。
无论什么时候,只要轨迹融合节点上收到一组TCAS局部轨迹和ADS-B局部轨迹,融合算法就将推算出收到TCAS局部轨迹和ADS-B局部轨迹瞬间目标飞机的融合轨迹的状态,并和当前的局部轨迹进行融合,估算出组合轨迹的状态矢量,并获得当前的融合轨迹。当收到新一组的局部轨迹时,再重复以上步骤[2]。如此重复,就获得了目标飞机在不同时刻的状态和轨迹。
6.2 组合监视数据融合算法
考虑到对空中监视精度和实时性的要求,本文选择当前统计模型来跟踪目标飞机的状态和轨迹。状态方程为[7]
X(k+1)=F(k)X(k)+G(k)u(k)+V(k)(1)式中,V(k)为高斯白噪声的零均值,u(k)为已知的输入控制信号,G(k)为输入控制矩阵,F(k)为转换矩阵,X(k)为状态变量。
TCAS系统和ADS-B系统分别对目标飞机进行独立的监视,使用TCAS观测值和ADS-B观测值,TCAS局部卡尔曼滤波器和ADS-B局部卡尔曼滤波器分别估算优化的TCAS局部轨迹和优化的ADS-B局部轨迹。局部卡尔曼滤波器的模型为

式中,z(k)为观测值,H(k)为观测矩阵,N(k)为观测噪声序列。
TCAS系统和ADS-B系统利用局部滤波器估算出优化的局部状态Xi(k),i=1,2,1代表TCAS,2代表ADS-B。基于当前统计模型的第i个局部卡尔曼滤波器的算法为[8]
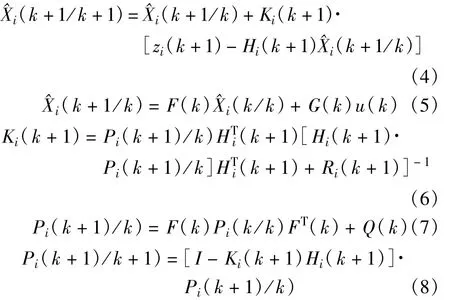
式中,X^i为第i个局部卡尔曼滤波器的状态矢量,Pi(k+1)为第i个局部卡尔曼滤波器的状态矢量协方差矩阵,K(k)为卡尔曼滤波器的增益。
经过并行的TCAS局部卡尔曼滤波器和ADS-B局部卡尔曼滤波器处理后,得到了优化的TCAS局部轨迹X^TCAS(k)和优化的ADS-B局部轨迹X^ADS-B(k)。
根据最小方差原则,将两个局部优化轨迹X^TCAS(k)和X^ADS-B(k)在整体卡尔曼滤波器中进行线性融合,融合的原则是取X^TCAS(k)和X^ADS-B(k)的加权平均值。整体优化融合估计为[9]

式中,X^为整体融合后的状态矢量,W1和W2为待定矩阵系数,且W1+W2=I(I是一个2×2的单位矩阵),W1和W2的取值要使X^为无偏差最小方差估计,即X^满足以下要求:一是无偏差,即E(X-X^)=0;二是X^的估计误差的协方差P^=E[(X-X^)(X-X^)T)最小,且小于任何一个局部状态的误差,即P^≤P^1且P^≤P^2。证明使用加权平均值进行状态矢量的估计后,融合估计状态矢量的误差小于任何一个局部优化的状态矢量的误差。
假设TCAS系统和ADS-B系统的状态矢量估计误差分别为^P11和^P22,而两个系统局部状态矢量估计的协方差为^P12和^P21,由于TCAS的监视和ADSB的监视是相互独立且并行完成的,所以^P12=^P21=0。所以,

由此可以证明,使用^XTCAS和^XADS-B的加权平均值,可以估算出目标飞机的最优状态矢量和估计。
7 算法验证
在验证本组合监视系统的仿真中,主要验证了最为复杂的监视区域,即TCAS的TA保护区域内的区域。所以,使用仿真条件要符合TCAS/ADS-B组合监视的原理,又要和飞机机动飞行时的加速度和速度相符,具体的仿真条件如下:
(1)TCAS系统的采样频率和ADS-B系统的采样频率都设置为1 Hz;
(2)假设TCAS系统和ADS-B观测误差分别为50 dB和40 dB,且都为高斯白噪声;
(3)权重W1=0.7,W2=0.3;
(4)假设目标飞机的初始状态为

式中,vxo和vy0分别为初始速度的水平分量和垂直分量,单位为m/s;axo和ay0分别为初始加速度的水平分量和垂直分量,单位m/s2;
(5)假设飞机按初始状态飞行10 s,然后按ax=3、ay=0的加速度飞行10 s,然后再按恒定速度飞行20 s。
仿真结果如图4所示。

图4 目标飞机的位置估算误差仿真Fig.4 Target aircraft position estimation error
图4中的仿真结果表明,最大优化的TCAS状态估计误差为200 m,最大优化的ADS-B状态估计误差为180 m,而最大优化融合状态估计误差为100 m。所以,按本方法构建的TCAS/ADS-B组合监视系统经数据融合后,其最大优化融合状态估计误差小于最大优化TCAS状态估计误差和最大优化ADS-B状态估计误差,证明本组合方法有效。
8 结论
TCAS/ADS-B组合监视系统是基于TCAS本身的防撞功能的系统,在这种组合监视系统中,TCAS接收目标飞机ADS-B系统的广播信息,并和TCAS数据按当前统计模型进行数据融合,提高了融合状态矢量的精度。但是,本次仿真只涉及飞机在水平方向的机动飞行,对飞机垂直方向的机动飞行对TCAS/ADS-B组合监视系统的监视精度的影响还有待研究。
[1]杨万海.多传感器数据融合及应用[M].西安:西安电子科技大学出版社,2004. YANG Wan-hai.Multisensor Data Fusion and its Application[M].Xi′an:Xidian University Press,2004.(in Chinese)
[2]郝利超,雷虎民,王飞,等.基于当前统计模型的模糊自适应跟踪算法[J].电光与控制,2009,16(10):18-21. HAO Li-chao,LEI Hu-min,WANG Fei,et al.A Fuzzy Adaptive Tracking Algorithm Based on the Current Statistical Model[J].Electronics Optics&Control,2009,16(10):18-21.(in Chinese)
[3]RTCA DO-300,Minimum Operational Performance Standards(MOPS)for Traffic Alert and Collision Avoidance System II(TCAS II)Hybrid Surveillance[S].
[4]何晓薇,徐亚军.航空电子设备[M].成都:西南交通大学出版社,2004. HE Xiao-wei,XU Ya-jun.Aerospace Electronic Equipment[M].Chengdu:Southwest Jiaotong University Press,2004.(in Chinese)
[5]张军.现代空中交通管理[M].北京:北京航空航天大学出版社,2005. ZHANG Jun.Modern Air Jiaotong Management[M].Beijing:Beijing University of Aeronautics and Astronautics Press,2005.(in Chinese)
[6]RTCA DO-260A,Minimum Operational Performance Standards for 1090MHzExtendedSquitterAutomaticDependent Surveillance Broadcast(ADS-B)and Traffic Information Services Broadcast(TIS-B)Volume 1[S].
[7]Bernays D J,Drumm A C,Shank.Validation techniques for ADS-B surveillance data[C]//Proceedings of 2002 IEEE Digital Avionics Systems Conference.Irvine,CA:IEEE,2002:1-9.
[8]Huang M S,Narayanan R M,Feinberg A.Multiple targets estimation and tracking for ADS-B radar system[C]//Proceedings of IEEE/AIAA 27th Digital Avionics Systems Conference.St.Paul,MN:IEEE,2008:1-10.
XU Ya-jun was born in Qionglai,Sichuan Province,in 1970.She received the M.S.degree fromNorthwesternPolytechnicalUniversityin 2003.She is now an associate professor.Her research direction is avionics.
Email:genius98@126.com
何桂萍(1986—),女,四川广元人,硕士研究生,主要研究方向为航空电子。
HE Gui-ping was born in Guangyuan,Sichuan Province,in 1986.She is now a graduate student.Her research direction is avionics.
Data Fusion Algorithm for TCAS/ADS-B Integrated Surveillance System Based on Current Statistical Model
XU Ya-jun,HE Gui-ping
(Aero Engineering Institute,Civil Aviation Flight University of China,Guanghan 618307,China)
The principle difference between Traffic Alert and Collision Avoidance System(TCAS)and Automatic Dependent Surveillance-Broadcast(ADS-B)surveillance is compared.A TCAS/ADS-B integrated surveillance system based on the current statistical model is built.The surveillance range of the integrated surveillance system is divided into sub-ranges.Using the data fusion algorithm,the optimal local track of TCAS and ADS-B,as well as the optimal fused track of the integrated system are estimated.The simulation results show that the maximum optimal fused estimated position error is 100 m,which proves that the integrated system can improve track estimates accuracy,so as to improve the surveillance precision of TCAS.
TCAS;ADS-B;integrated surveillance;local track;data fusion;fused track;current statistical model
The National High-tech R&D Program(863 Program)of China(2006AA12A103)
date:2013-05-28;Revised date:2013-07-29
国家高技术研究发展计划(863计划)项目(2006AA12A103)
❋❋通讯作者:genius98@126.comCorresponding author:genius98@126.com
TN967.5;V243
A
1001-893X(2013)09-1154-05

徐亚军(1970—),女,四川邛崃人,2003年于西北工业大学获硕士学位,现为副教授,主要研究方向为航空电子;
10.3969/j.issn.1001-893x.2013.09.007
2013-05-28;
2013-07-29
