徕卡水准网平差软件在长江干线航道四等水准测量中的应用*
2013-06-15虞如昌程新平长江宜昌航道局湖北宜昌443000
虞如昌 袁 鹏 张 琴 程新平(长江宜昌航道局,湖北 宜昌 443000)
徕卡水准网平差软件在长江干线航道四等水准测量中的应用*
虞如昌 袁 鹏 张 琴 程新平
(长江宜昌航道局,湖北 宜昌 443000)
根据目前长江干线航道四等水准测量的实际情况,以及水准网平差对软件的需求,提出利用徕卡水准网平差软件进行平差的方案。通过庙河-大埠街段四等水准测量的实例,与COSA软件平差结果进行对比,分析徕卡水准网平差软件在实际应用中的优势和最终结果的精度,证明徕卡水准网平差软件能满足长江干线航道四等水准测量的精度要求,为今后四等水准测量平差提供一个新的选择。
徕卡水准网平差软件;水准网平差;精度比较
徕卡水准网平差软件是由徕卡公司推出的一款水准测量成果平差处理的应用程序,既可对单条水准线路进行平差计算,又可以对多条水准线路组合的水准网进行平差处理。水准测量成果导入到软件后,可以输出打印为等级水准测量原始记录的标准格式报表。本软件操作简单,界面简洁明了,容易上手并熟练操作。支持多种数据格式的平差处理,既可用于处理电子水准仪中输出的特定格式数据,又支持手工记录电子或光学水准仪器测量数据。
1 概述
长江干线航道测量控制网点是长江干线航道测量的基础,也是长江干线航道科研、规划、设计、施工、维护、船舶航行的技术依据。无论是航道维护水深测量、地形测量,还是施工放样、专项测量等,都必须有准确的测量控制点作为测量基准,因此,在航道建设中测量控制网具有基础性的重要地位[1]。测量控制点资料分为两大方面:平面坐标和高程。平面坐标可以用GPS接收机以静态观测的方式获得,而精确的高程则必须用水准仪来准确测量。
由于受地区经济高速发展和地域环境的影响,施工频繁、建筑物重建、大堤堤防建设、固定建筑物废弃、植被生长等,造成部分控制点受到毁坏,且地区自然沉降,造成部分点点位变动,部分控制点遭到不同程度地破坏,丧失了为长江航道维护测量提供基准框架的功能,不能适应长江电子航道图数据及时更新要求。为了适应长江中下游干线航道维护测量和航道大规模整治的测量需求,满足长江电子航道图数据及时更新要求,长江航道局决定对长江干线D级GPS控制网进行修复。其中长江宜昌航道局负责庙河至大埠街段9 个D级GPS毁坏点的重建及其他变动点的重测工作,用GPS静态观测方式求得平面坐标,高程则以四等水准测量获得。
2 徕卡水准平差软件简介
2.1 徕卡水准网平差软件的优点
水准测量完毕后,由于误差传播的影响,必须对结果进行平差处理才能得到各点的精确高程[2]。可用来进行水准网平差的软件众多,比如武汉大学测绘学院自主研发的COSA地面控制测量数据处理系统、南方公司研发的南方平差易软件等。这些软件操作也比较简单,容易上手,但是对数据格式要求较高,参与解算的观测数据需按固定格式进行编辑排列。而现今的电子水准仪观测数据格式各不相同,导出来的数据文件后缀名也不唯一,造成水准网平差前还需对数据格式进行编辑,尤其在水准线路较长、观测站数多的时候,数据格式编辑工作变得极为复杂。
在本次庙河至大埠街四等水准观测中,我们使用的仪器为徕卡电子水准仪,数据导出后无需编辑便可直接使用徕卡水准网平差软件进行解算,没有了繁复数据格式编辑,大大提高了工作效率,因此我们选择徕卡水准网平差软件为本次解算软件。
2.2 徕卡水准网平差软件使用流程(见图1)
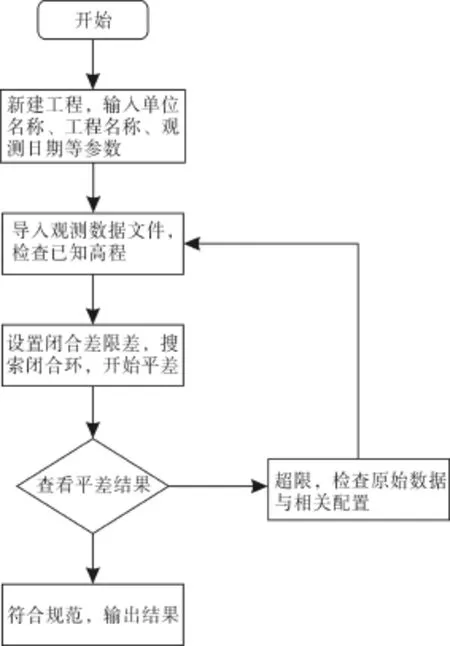
图1 徕卡水准网平差软件使用流程
3 实际运用分析
本次工程共需修复的四等高程点为9个,其中8个点采用附合导线方式测量,另一个点采用闭合导线方式测量。测站观测顺序为:后-前-前-后,测量时严格遵照相关规范,保证最大视线长度最大视线长度≤100m,前、后视距差≤5m,前、后视距累计差≤10m,红黑面读数≤3mm,红黑面高差之差≤5mm[3]。每天测量完毕后,将数据导出,用水准网平差软件进行解算。
3.1 平差结果
将本次工程9段水准路线经过平差结算后所得结果如表1所示,从中我们可以得到,中误差最大值为8号点:0.00434米,最小为4号点:0. 00001米。根据四等水准规范要求:每公里水准测量的偶然中误差M△≤±5.0mm,每公里水准测量的全中误MW≤±10.0mm,相对于起算点的最弱点高程中误差不应超过20mm[4],可知本次水准测量结果符合四等水准测量规范要求。

表1 水准平差结果
3.2 结果分析
为验证徕卡水准网平差软件解算结果与实际是否存在误差,我们选取7号点和9号点两个点所测的水准线路数据,导入武汉大学测绘学院研发的COSA软件进行再次解算,将结果进行比较,具体的比较结果详见表2、表3、表4、图2、图3。

表2 徕卡水准网平差软件结果

图2 7号点所在线路各测站详细中误差

图3 9号点所在线路各测站详细中误差
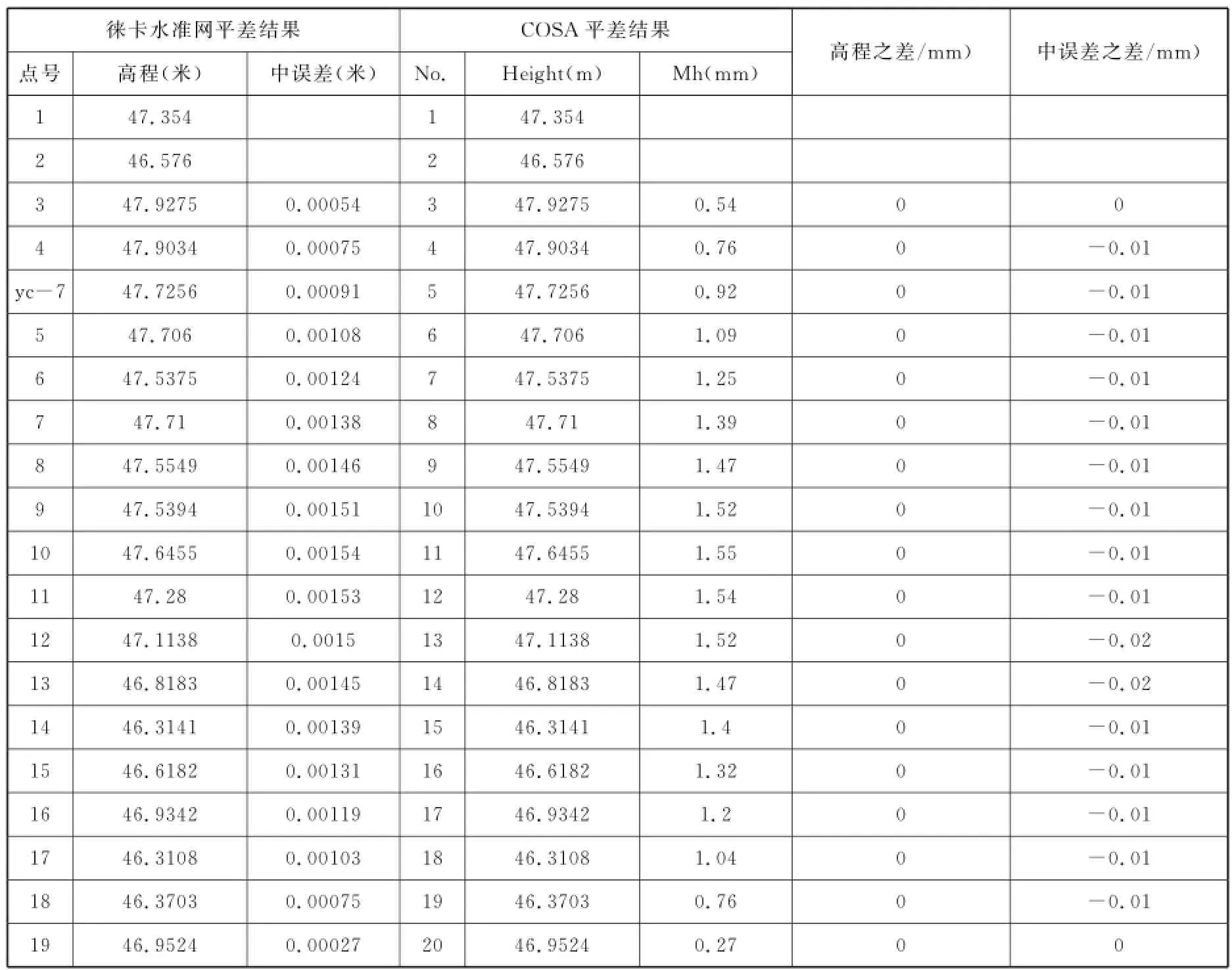
表3 7号点徕卡平差网与COSA成果比较表
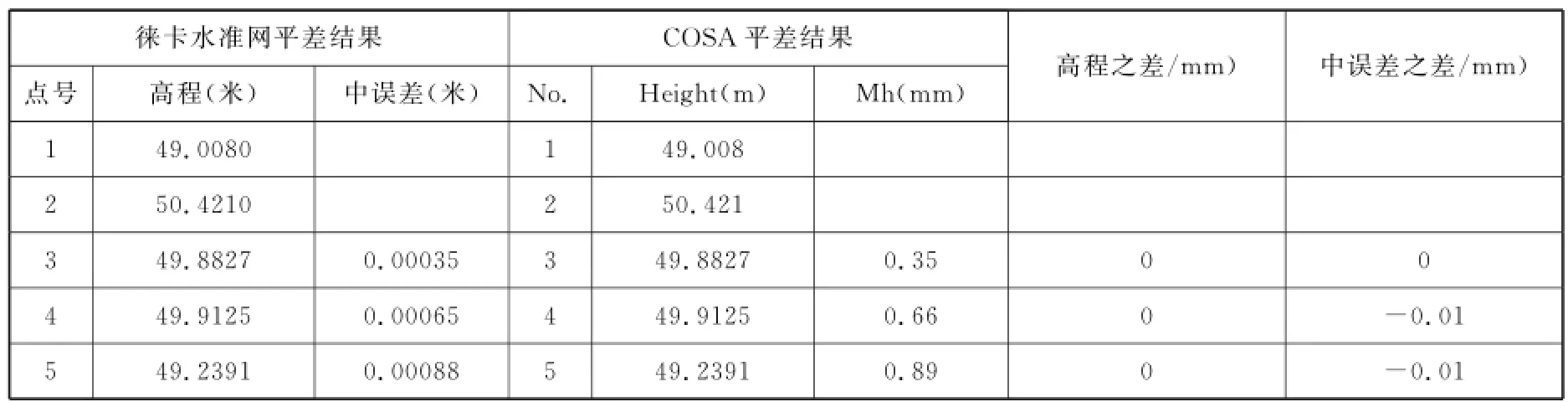
表4 9号点徕卡平差网与COSA成果比较表
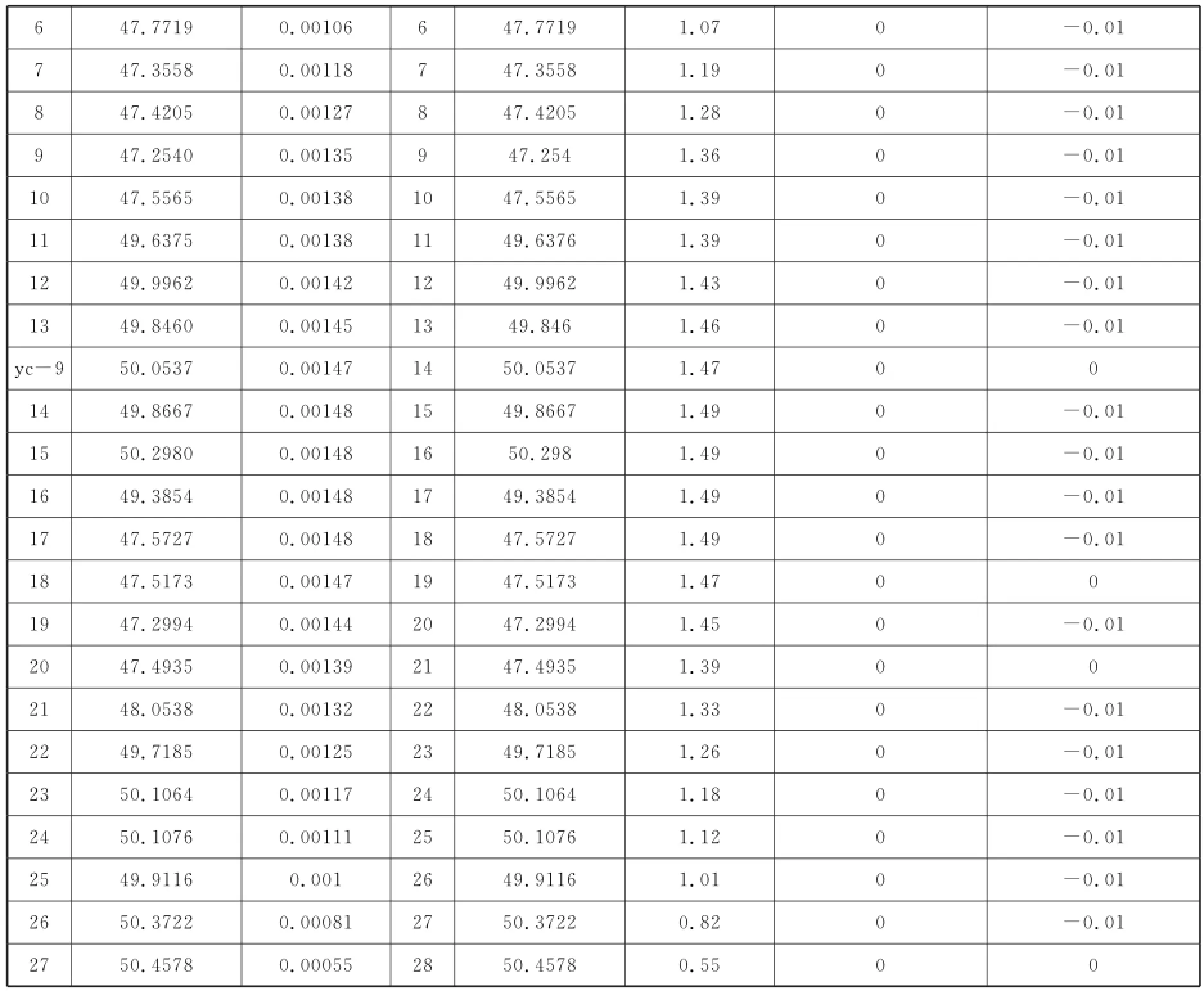
6 47.7719 0.00106 6 47.7719 1.07 0 -0.01 7 47.3558 0.00118 7 47.3558 1.19 0 -0.01 8 47.4205 0.00127 8 47.4205 1.28 0 -0.01 9 47.2540 0.00135 9 47.254 1.36 0 -0.01 10 47.5565 0.00138 10 47.5565 1.39 0 -0.01 11 49.6375 0.00138 11 49.6376 1.39 0 -0.01 12 49.9962 0.00142 12 49.9962 1.43 0 -0.01 13 49.8460 0.00145 13 49.846 1.46 0 -0.01 y c-9 50.0537 0.00147 14 50.0537 1.47 0 0 14 49.8667 0.00148 15 49.8667 1.49 0 -0.01 15 50.2980 0.00148 16 50.298 1.49 0 -0.01 16 49.3854 0.00148 17 49.3854 1.49 0 -0.01 17 47.5727 0.00148 18 47.5727 1.49 0 -0.01 18 47.5173 0.00147 19 47.5173 1.47 0 0 19 47.2994 0.00144 20 47.2994 1.45 0 -0.01 20 47.4935 0.00139 21 47.4935 1.39 0 0 21 48.0538 0.00132 22 48.0538 1.33 0 -0.01 22 49.7185 0.00125 23 49.7185 1.26 0 -0.01 23 50.1064 0.00117 24 50.1064 1.18 0 -0.01 24 50.1076 0.00111 25 50.1076 1.12 0 -0.01 25 49.9116 0.001 26 49.9116 1.01 0 -0.01 26 50.3722 0.00081 27 50.3722 0.82 0 -0.01 27 50.4578 0.00055 28 50.4578 0.55 0 0
由图2和图3可知,7号点线路和9号点线路最大中误差均小于0.0016m,符合规范中最弱点中误差不超过20mm的要求。
由表3和表4可知,在7号线路和9号线路中,徕卡平差网软件得出的高程结果与COSA完全一样,只在中误差上有0.01-0.02mm的差距。
3.3 总结
由徕卡水准网平差软件结果可知,软件平差后各点的高程中误差符合规范要求。随机选取两点与COSA平差结果相比较发现,各线路上每站高程均相同,只在各点中误差上有0.01mm的极小差距。因此,我们可以得出如下结论:徕卡水准网平差软件结果准确,完全能满足普通用户对水准数据处理的要求。
4 结束语
徕卡水准网平差软件在长江干线(庙河-大埠街)航道四等水准测量数据处理中,表现优异,操作方便,平差结果与国内平差常用的COSA软件几无差别,完全能满足普通用户的精度要求。由于其与徕卡电子水准仪的配套性,省去了中间数据格式的编辑工作,大大提高了数据处理效率。在解算过程中,徕卡水准网平差软件运算速度快,流程简单,各项指标一目了然,在今后长江干线航道四等水准测量数据处理中可以广泛的应用。
[1]长江干线(中下游)航道测量控制网点损毁2012年度修复方案设计[R].武汉:长江三峡勘测研究院有限公司,2012:1-2.
[2]孔祥元,郭际明,刘宗泉.大地测量学基础[M].武汉:武汉大学出版社,2010:316-322.
[3]中华人民共和国交通运输部.JTS131-2012,水运工程测量规范[S].北京:人民交通出版社,2012: 18.
[4]中华人民共和国国家质量监督检验检疫总局,中国国家标准化管理委员会.GB12898-91,国家三四等水准测量规范[S].北京:中国标准出版社,2009:2.
P207+.2
A
1672-9846(2013)03-0079-04
2013-07-02
虞如昌(1989-),男,湖北宜昌人,长江宜昌航道局助理工程师,主要从事航道领域测量工作。
袁 鹏(1976-),男,湖北宜昌人,长江宜昌航道局高级工程师,主要从事航道领域测量工作。
张 琴(1986-),女,湖北宜昌人,长江宜昌航道局中级工程师,主要从事航道领域测量数据处理工作。
程新平(1972-),男,湖北宜昌人,长江宜昌航道局中级工程师,主要从事航道领域测量数据处理工作。
