三相无刷直流电机改进型脉宽调制策略
2013-06-07何瑞玲周海森闫茂德
林 海,何瑞玲,周海森,闫茂德
(长安大学电子与控制工程学院,西安 710064)
三相无刷直流电机改进型脉宽调制策略
林 海,何瑞玲,周海森,闫茂德
(长安大学电子与控制工程学院,西安 710064)
研究了一种改进型无刷直流电机脉宽调制策略。在传统的无刷直流电机脉宽调制技术的基础上,针对调制期间开关管断开时的电机绕组电流无法有效控制问题,研究了一种基于六开关电压源型逆变器的四管调制策略,即在任意时刻逆变器都有4个功率开关同时参与调制过程。该方法在脉宽调制过程中,在电机绕组电流导通状态下,在两个开关桥臂上仅仅有两个开关工作;在绕组电流处于续流状态下,在同一个逆变器桥臂上的,有对称的另外两个开关进行导通续流。这种调制方式可以抑制非换向期间非导通相的续流问题,并且通过调节换向期间的占空比可以有效抑制非导通相的电流脉动问题。实验结果进一步验证了提出方法的有效性。
无刷直流电机;脉宽调制;转矩脉动;占空比
无刷直流电机BLDCM(brushless DC motor)由于其优良机械转矩和机械功率特性,广泛应用在家电、电力机车、飞行器和船舶推进等交流调速领域[1]。目前,无刷直流电机研究工作主要集中在无位置传感器控制、逆变器拓扑和转矩脉动抑制等方向[2]。其中,转矩脉动抑制是其研究的一个热点[3]。常规两两导通方式下的无刷直流电机多在采用基于电流控制的PWM调制策略[4]。对于无刷直流电机,其电磁转矩正比于电流。不同的PWM调制方式往往导致转矩脉动的差异,尤其是换向转矩脉动[5]。为了有效减小无刷直流电机控制中转矩脉动并提高系统的控制性能,研究人员进行了大量深入的研究工作。文献[3]在原理上分析了无刷直流电机由于换相对转矩的影响。文献[4]研究了无位置传感器系统中四种脉宽调制PWM(pulse width modulation)方式对于换向转矩脉动的不同影响和换向期间非导通相电流特性,通过研究知道,无刷直流电机采用PWM_ON调制方式时,其换相转矩脉动最小。对于三相无刷直流电机,不同的PWM调制方法会引起非导通相的续流现象,文献[5]提出了一种新的PWM调制方法(PWM_ON_PWM),该方法可以有效减小电机定子电流脉动和转矩脉动。文献[6]提出了电机制动时采用双管反接制动的PWM调制方法,该方法可以有效控制制动电流,在本质上是一种采用HPWM_LPWM调制方式的电机制动策略。文献[7]简单的介绍了一种基于复杂可编程逻辑器件CPLD(complex programmable logic device)的BLDCM双极性驱动逻辑实现方法。同时考虑功率开关管的死区控制,避免了相桥臂直通。
在常规的PWM调制方式中,当调制期间的开关管处于断开状态时,电机绕组电流只能通过对应的二极管续流导通。由于反电动势的作用,绕组电流幅值继续上升,此时的续流电流是不能通过开关管进行有效控制的。不同的PWM调制方式对应的续流方式也不同,这也同时造成了电流脉动和转矩脉动差异。在分析了常规的PWM调制方式原理的基础上,针对续流电流的不可控特性,本文研究了一种新的PWM调制方式:四管调制。即在六开关电压源型逆变器中,任意时刻下其中4个开关始终处于调制状态。该方式可以在任意时刻有效控制电机绕组电流,并且可以完全消除非换向期间非导通相续流的现象,从而抑制了非换向期间非导通相转矩脉动;同时可以通过改变换向期间的占空比有效抑制换向转矩脉动。
1 常规的脉宽调制方式
对于三相星型绕组连接的永磁无刷直流电机,其控制策略通常采用120度导通的PWM控制策略。电机主要通过六开关三相电压型逆变器供电,逆变器和电机等效模型如图1所示。
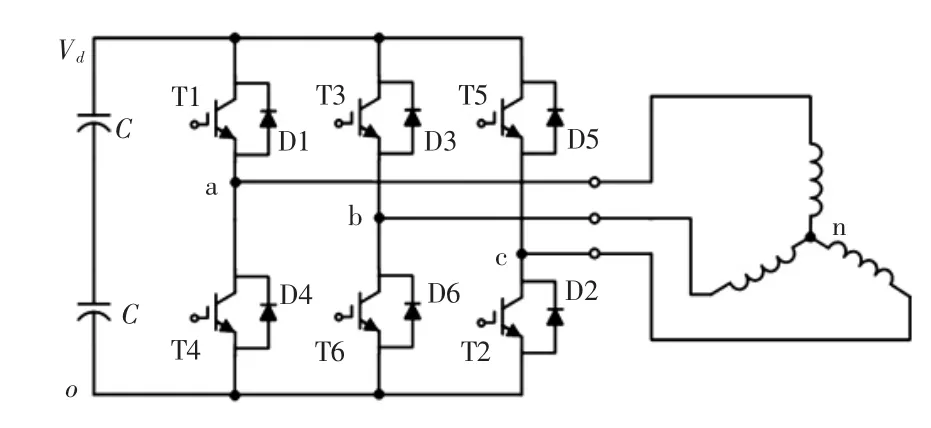
图1 由逆变器供电的无刷直流电机Fig.1 Brushless DC motor fed by a six-switch inverter
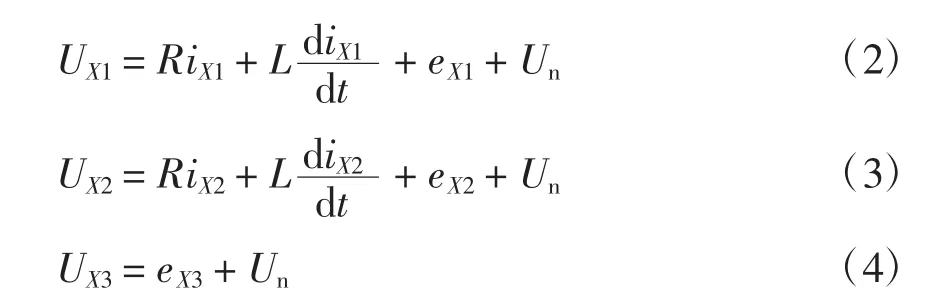
由图1,逆变器由6个开关管(T1,T2,T3,T4,T5,T6)、6个并联二极管(D1,D2,D3,D4,D5,D6)和滤波电容等组成。右侧为无刷直流电机三相绕组,绕组中点为n。电机定子相电压方程[4~5]为
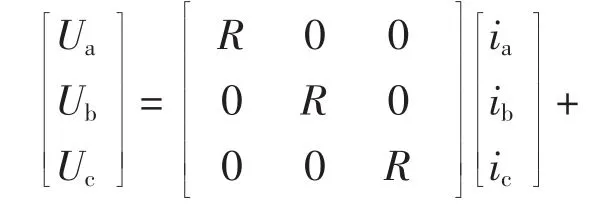
式中,UaUbUc,iaibic和eaebec分别为电机相电压、相电流和相反电动势;Un为电机三相绕组中点电压;R为电机定子等效相电阻;L为电机定子等效相电感。
当电机工作于120°导通方式下,整个工作过程可以分为两个过程:调制和换向。常见的PWM调制方式主要有PWM_ON,ON_PWM,HPWM_LON,HON_LPWM,HPWM_LPWM五种[3~4]。为了方便分析,将前4种归为第1类调制方式,第5种归为第2类。两类方式的区别主要在于任意时刻下前者只有1个开关管进行调制(单管调制)而后者有两个开关管(双管调制)。两种类型的调制策略也导致了后者总开关损耗相对于前者增加了1倍,而且单管调制时,逆变器输出单极性(正)电压,双管调制时逆变器输出双极性(正负)电压。两类方式的共性在于在调制过程中,开关管断开期间,电机绕组工作相电流都需要通过相应的二极管续流。对于换向过程,不同的调制方式对应着不同电流换向过程。
以双管调制方法加以说明。图2为无刷直流电机HPWM_LPWM调制策略工作原理。在HPWM_LPWM方式下,电机A相和B相绕组处于正常工作状态,开关管T1和T6为调制工作状态。当T1和T6导通时,电机相电流流向为:电源→T1→A相绕组→B相绕组→T6→电源。当T1和T6断开时,电机相电流流向为:电源→D4→A相绕组→B相绕组→D3→电源。根据电流流向分析可以知道:在逆变器调制状态期间,两个开关管和两个二极管参与调制;当开关管导通时,直流母线电流迅速增加;开关管断开时,绕组电流通过二极管反向续流,直流母线电流逐渐减小。对于单管调制方式的分析与上面分析相似。
2 四管调制策略
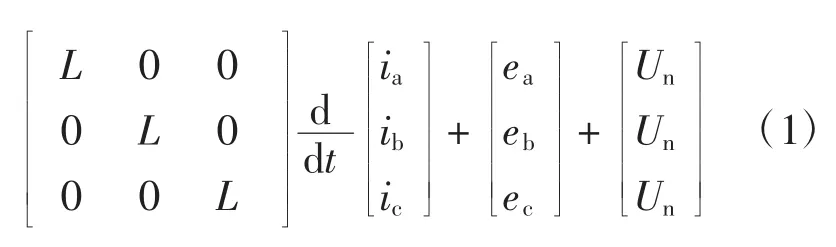
在以上两类调制方法中,为了分析简便,往往忽略二极管压降进行研究,但是在实际应用中,逆变器电路工作在续流状态下,电机绕组电流处于不可控制状态。二极管的续流效应及其压降对系统性能的影响较大[3~4]。为此,在双管调制的基础上,本文针对传统的PWM方法这一缺陷研究一种新型调制方法:四管调制。即在六开关电压源型逆变器中,任意时刻其中4个开关始终处于调制状态。如图3所示。
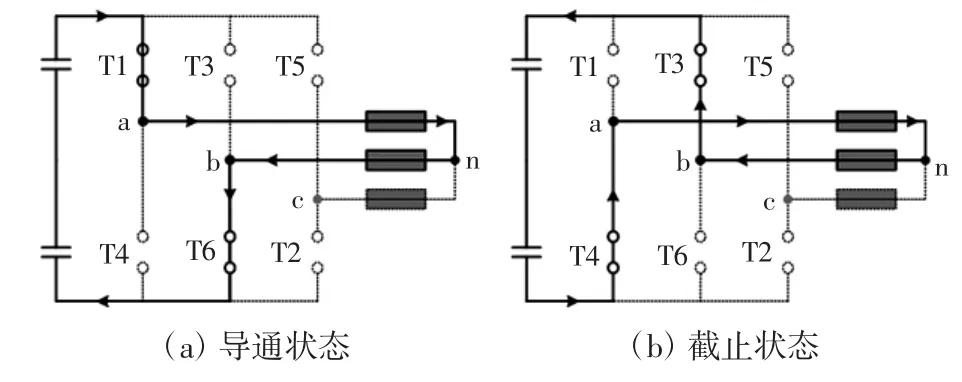
图3 四管调制方式(调制过程)Fig.3 Principle of four-switch PWM method
当电机A相和B相绕组处于正常工作状态时,可通过开关管T1、T6、T3和T4联合调制。当T1和T6导通时,工作相电流流向为:电源→T1→A相绕组→B相绕组→T6→电源。当T1和T6断开时,工作相电流流向为:电源→T4→A相绕组→B相绕组→T3→电源。在此定义T1和T6为主调制管,T3和T4为辅调制管,由电流流向分析可以知道:调制期间,仅有4个开关管参与调制;当主调制管导通时,直流母线电流为正;主调制管断开时,绕组电流通过辅调制管反向续流,直流母线电流为负。
对于120°导通方式下的无刷直流电机控制,在一个电周期内,绕组电流导通顺序可以通过逆变器的开关管导通顺序表示:(T1、T2)→(T2、T3)→(T3、T4)→(T4、T5)→(T5、T6)→(T6、T1)。它们也代表着不同绕组工作状态下的主调制管,对于辅调制管及它们的对应关系如表1所示。
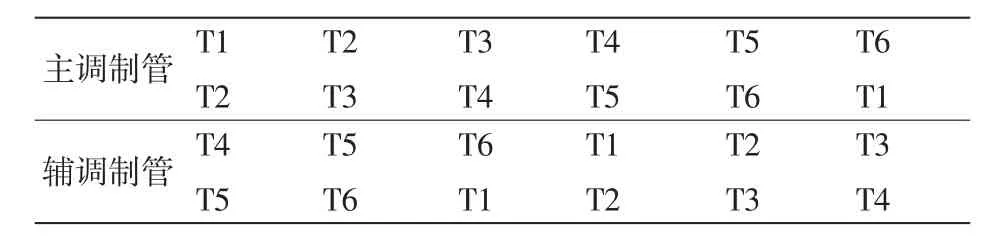
表1 主调制开关与辅调制开关表Tab.1 Main and auxiliary modulation switches
四管调制和双管调制在一个电周期内4个开关(G1、G3、G4和G6)触发信号如图4和图5所示。其中,Em为反电动势的幅值,Vm为开关管触发信号的幅值。综合对比分析四管调制(图4)和双管调制(图5)可以看出:两种调制方式有相似之处,但也存在本质性的差异。双管调制中,调制过程通过一对开关管和一对二极管实现。开关管导通期间,开关管控制正向绕组导通电流,但在断开期间,绕组中电流不受开关管控制,仅通过二极管续流,这一点同样存在于单管调制中。四管调制中,调制过程通过一对主调制开关管和一对辅调制开关实现。主调制管用于控制正向绕组导通电流,辅调制管用于控制反向绕组续流,电机工作相电流随时处于开关管的控制之中。在调制期间任意时刻下都只有两只开关管处于导通状态而且二极管不参与调制(这一点和常规的PWM调制方式完全不同),该调制方法能够满足调节电机速度及电流的需要。
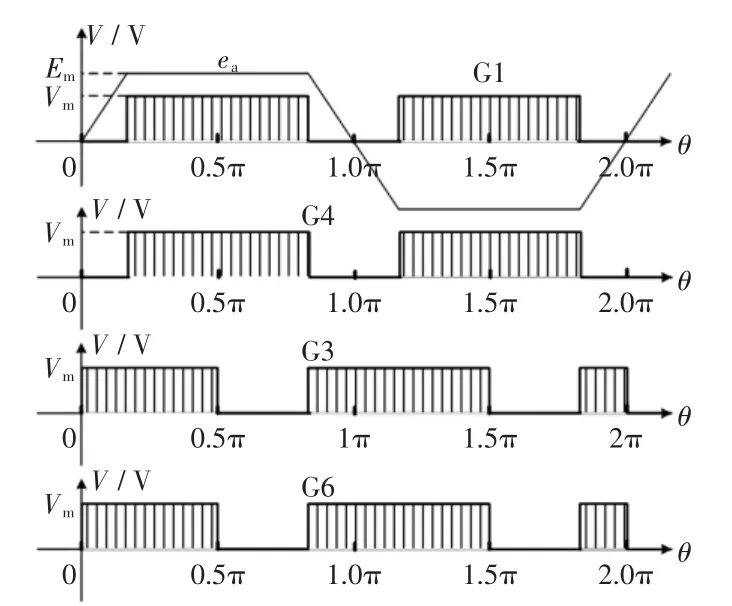
图4 四管联合调制方式Fig.4 Four-switch PWM method
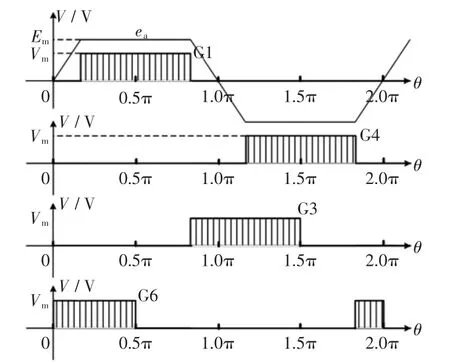
图5HPWM_LPWM方式Fig.5HPWM_LPWM method
2.1 非导通相续流动态特性分析
四管调制方式下的电机定子绕组在任意时刻只有两相绕组处于工作状态。定义X1、X2分别为正在导通的两相绕组,X3为未导通相绕组。以图3为例,X1=A相,X2=B相,X3=C相。由式(1)得:
式中:iX1=-iX2=|id|,eX1=-eX2=E,E为反电动势平顶部分的幅值;UX1=UX2=Ud,Ud和id为分别为直流母线电压和电流。
由式(2)和式(3)得

对于无刷直流电机,任意相反电动势满足:

由式(4)~式(6)可得

由式(7)可知,未导通相端电压UX3为正电压而且始终小于直流母线电压,而对应桥臂的二极管由于承受负向电压而处于断开状态,即iX3=0。因此,四管调制方式可以有效克服非导通相续流的出现。
2.2 换向电流动态特性分析
在图3中,电机在四管调制方式下A相和C相绕组正常工作,其主调制管为T1和T6。当A相绕组电流换向到C相绕组后,主调制管为T5 和T6,在换向瞬间,电机三相绕组电流流向如图6所示。
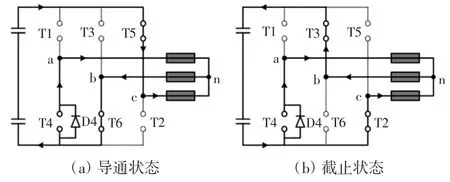
图6 四管调制方法换向过程Fig.6 Commutation of four-switch PWM method
在四管调制方式下的电机绕组电流换向瞬间,三相绕组电流都存在,而且二极管也参与换向过程。在此重新定义X1为未换向相,X2为待换向相,X3为已换向相。以图4为例,X1=B相,X2= A相,X3=C相。对于三相绕组为星型连接且无中线引出的无刷直流电机,绕组电流换向过程首先满足

换向过程分为两种情况(图4),具体分析(忽略二极管导通压降)如下:
1)主调制管导通瞬间的换向
定子相电压为
式中:eX1=eX2=-eX3=E(上桥臂换向时);UX3=Ud。为了便于分析,忽略定子绕组电阻,由式(8)和式(9)得
2)辅调制管导通瞬间的换向
定子相电压为

式中:eX1=eX2=-eX3=E;UX1=Ud。忽略定子绕组电阻,由式(8)和式(11)得

在一个电周期内,只要保证非换向相电流无脉动就可以保证换向时电磁转矩无脉动。定义D为调制占空比,则有

由式(13)得

由式(14)可知,只要满足占空比D,可以消除此时的电磁转矩脉动。
3 实验结果
为了验证以上分析,对本文提出的方法进行实验验证。在实验中,以一台额定转速为3 000 r/min的无刷直流电机作为研究对象,利用TI公司的2812 DSP作为主控芯片和6个MOSFET开关功率管组成的逆变器进行实验[8]。图7为采用HPWM_ LPWM和本文研究的四关调制方式下的三相定子电流实验波形。图8为采用HPWM_LPWM和本文研究的四关调制方式下的定子A相电流和开关管(T1、T3、T4和T6)的触发信号实验波形。
由图7和图8可以看出,实验结果和理论分析一致,两种调制方式下的电机运行稳定,电流波形正常,本文研究的调制技术有效可行。当系统采用HPWM_Lpwm方式时,系统逆变器在任意时刻下仅有两个开关处于工作状态(一个开关管处于调制状态,另外一个为导通状态);系统采用四管调制方式时,逆变器在任意时刻下仅有4个开关处于工作状态。对于四管调制方式,逆变器每相桥臂的PWM控制信号互反,即在任意时刻都有4个开关管处于调制状态且二极管续流阶段,二极管不参与续流。电机绕组正向电流导通和反向续流都通过开关完成。需要注意的是,由于功率开关管自身都有开关延时,所以在每组上管和下管还是容易出现直通现象,会引起短路,因此必须在开关管触发信号中加入“死区”延时。
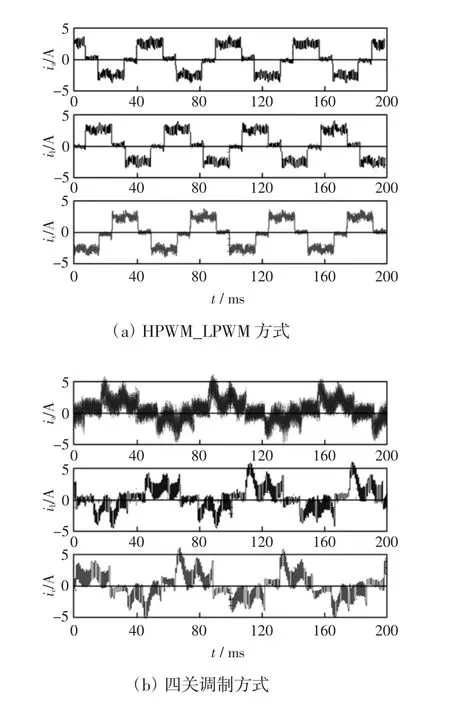
图7 系统三相电流实验波形Fig.7 Experimental results of three phase currents
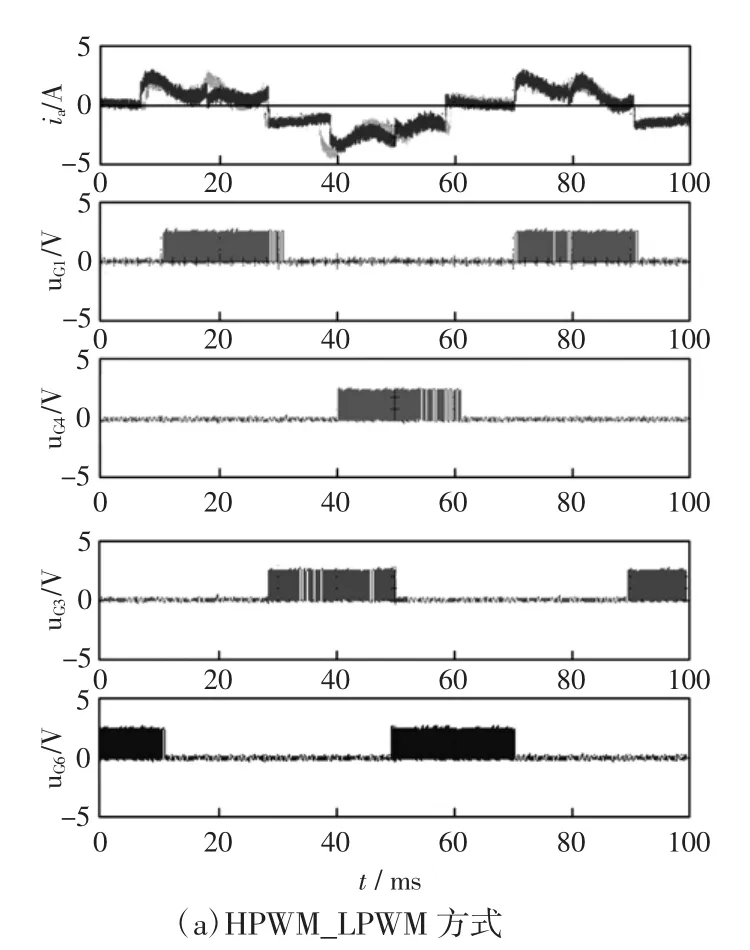

图8 A相定子电流实验波形和开关管触发信号实验波形(G1、G4、G3和G6)响应Fig.8 Experimental results of the current and the PWM signals of four switches
4 结语
通过轮流导通逆变器两对开关管的方式实现一种新颖的无刷直流电机PWM策略,即四管调制方式。由于四管调制时逆变器输出正向或负向电压,该调制属于双极性调制方式。由于它与常规的单管调制和双管调制截然不同,因此,它的可归类为第3类调制方式。在四管调制过程中,任意时刻下上下桥臂开关管轮流导通,解决了单管调制所造成的开关管散热不均匀的问题,减小了功率开关应力,但是总的开关损耗相对于双管调制也增加了1倍。由于该方式通过开关管可以在任意时刻对电机绕组电流进行控制,因此对于电机正反转调速及电机制动具有较好的控制效果,具有较大的应用前景。
[1]Byoung-Kuk Lee,Tae-Hyung Kim,Ehsani M.On the feasibility of four-switch three-phase BLDC motor drives for low cost commercial applications:topology and control[J]. IEEE Trans on Power Electronics,2003,18(1):164-172.
[2]Joong-Ho Song,lck Choy.Commutation torque ripple reduction in brushless DC motor drives using a single DC current sensor[J].IEEE Trans on Power Electronics,2004,19(2):312-319.
[3]Carlson R,Lajoie-Mazenc M,Fagundes J C d S.Analysis of torque ripple due to phase commutation in brushless DC machines [J].IEEE Trans on Industry Applications,1992,28(3):632-638.
[4]Zhang Xiang-Jun,Chen Bo-Shi.Influence of PWM modes on commutation torque ripples in sensorless brushless DC motor control system[J].Journal of Shanghai University,2001,5(3):217-223.
[5]Wei Kun,Ren Junjun,Teng Fanghua,et al.A novel PWM scheme to eliminate the diode freewheeling in the inactive phase in BLDC motor[C]//IEEE 35th Annual Power Electronics Specialists Conference.Aachen,Germany:2004.
[6]胡庆波,郑继文,吕征宇(Hu Qingbo,Zheng Jiwen,Lü Zhengyu).混合动力中无刷直流电机反接制动PWM调制方式的研究(Study on PWM strategy for braking of brushless DC motor in hybrid electric vehicle)[J].中国电机工程学报(Proceedings of the CSEE),2007,27(30):87-91.
[7]周勇,李声晋,芦刚(Zhou Yong,Li Shengjin,Lu Gang).基于CPLD的BLDCM双极性驱动逻辑实现方法(An approach to the implementation of the logic of bipolar drive for BLDCM based on CPLD)[J].微特电机(Small& Special Electrical Machines),2006(3):16-18.
[8]王晶晶,徐国卿,徐铁柱,等(Wang Jingjing,Xu Guoqing,Xu Tiezhu,et al).基于DSP高速信号处理器的空间电压矢量PWM技术的研究与实现(Research and realization of technique for space vector PWM based on digital signal processor)[J].电力系统及其自动化学报(Proceedings of the CSU-EPSA),2002,14(6):27-31.
Improved PWM Scheme for Permanent Magnet Brushless DC Motor Drives
LIN Hai,HE Rui-ling,ZHOU Hai-sen,YAN Mao-de
(School of Electronic and Control Engineering,Chang′an University,Xi'an 710064,China)
This paper describes an investigation of an improved pulse width modulation(PWM)strategy for the brushless DC(BLDC)motor drives.The traditional PWM strategy is analyzed and four switches joint modulation is proposed to control the current effectively during switches are off.At any time,only four switches in two legs of the six-switch inverter are in operation during the mode of the conduction and its symmetrical switches are in operation during the freewheeling mode.In the proposed scheme,the diode freewheeling of the inactive phase is eliminated,and the commutation torque ripple is eliminated by adjusting duty cycle.The effectiveness of the proposed PWM methods is verified through experimental results.
brushless DC motor;pulse width modulation(PWM);torque ripple;duty cycle
TM921
A
1003-8930(2013)06-0079-05
林 海(1978—),男,博士,讲师,研究方向为电力电子与电机驱动。Email:linhai@chd.edu.cn
2012-11-21;
2013-07-22
中央高校基本科研业务费专项资金资助项目(2013G1321043)
何瑞玲(1987—),女,硕士研究生,研究方向为永磁同步电机驱动技术。Email:heruiling0114@126.com
周海森(1987—),男,硕士研究生,研究方向为永磁同步电机驱动技术。Email:zhouhaisenyx@gmail.com
