动力学前馈控制系统研究
2013-06-05陈立坡
陈立坡
(92785部队 秦皇岛 066200)
通过消去中间变量,可以得到以电压uq(t)为输入变量,电动机转速ω(t)为输出变量的传递函数:
1 引言
传统交流伺服控制系统[1]的框图如图1所示。从图中可以看出,交流伺服控制系统一般由电流控制环、速度控制环、位置控制环构成。其中,位置控制环在最外面,是主闭环,电流控制环和速度控制环为内环。

图1 交流伺服控制系统的框图
交流伺服控制系统一般由电机、功率变换器、传感器、各种控制器等组成。其中,交流电机是进行能量转换的部件,也是整个控制系统的被控对象,功率变换器是把提供电能转换成所需要电能的装置,是把通常使用的直流电或者交流电转变成交流电控制所需要形式的装置;传感器是对伺服电机的绕组电流、转子速度以及转子位置进行检测的装置;控制器从传感器获得信号,并根据信号指令的控制要求,产生功率变换器所需要信号的装置。
交流伺服电机在运动过程中,难免会受到外界干扰力的影响,尤其是在高速运转的情况下,这些干扰力的存在会大大影响电机的控制精度。鉴于此,本文着重分析了一种基于动力学前馈的控制系统,目的是消除外界影响,从而大幅度提高高速运动的电机的控制精度。
2 交流伺服电动机的数学模型
参照文献[2],交流电机电压平衡和转矩平衡方程:
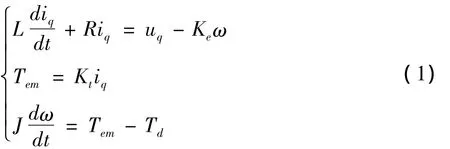
其中L为电机电枢电感;R为电机电枢电阻;Ke为电机反电动势系数;Kt为电机电磁转矩系数;J为电机转子和丝杠的转动惯量;Tem为电机电磁转矩;Td为作用于电动机轴上的阻转矩;ω为电机的转速。
对式(1)进行拉氏变换后,可得下列代数方程组
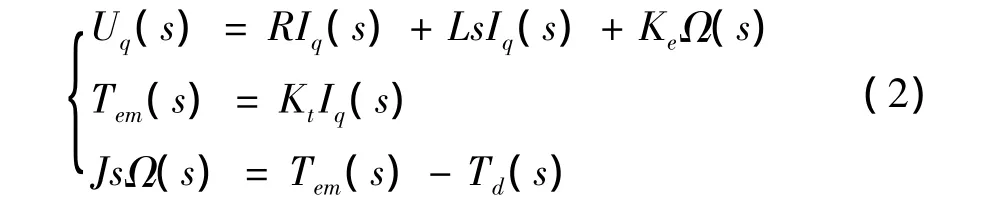
通过消去中间变量,可以得到以电压uq(t)为输入变量,电动机转速ω(t)为输出变量的传递函数:

通过以上分析,可得交流伺服电动机数学模型,如图2所示。
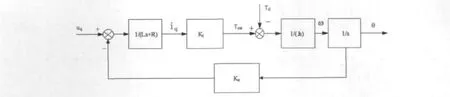
图2 交流伺服电动机数学模型
3 交流伺服控制系统
在交流伺服控制系统中,交流伺服电机运行状态的优劣取决于位置环、速度环和电流环三环控制器[3]设计的好坏。交流伺服控制系统有两种,一种是位置伺服控制系统,包括电流控制器、速度控制器和位置控制器;另一种是速度伺服控制系统,只包括电流控制器和速度控制器。因此选取合适的参数,能够在一定程度上提高系统的快速性、稳定性、准确性[4]。
在电流控制器、速度控制器和位置控制器中,电流控制器是最关键、重要的环节,因为不管是速度还是位置控制,最后都要转化成对交流电机电流的控制。
速度环的作用是保证速度指令与交流电机的实际转速相同,从而消除负载转矩扰动等因素对交流电机的影响,通过交流电机的实际转速和输入的速度指令相比较,速度控制器利用其差值直接产生指令控制电流,并与电流指令共同作用,控制交流电机匀速、加速、减速旋转,从而达到交流电机实际转速与控制指令保持一致。
位置环的作用是生成交流电机的速度指令,并能够使交流电机准确的跟踪、定位。交流电机的实际位置与设定的目标位置相比较,位置控制器利用其偏差生成交流电机的速度指令。当交流电机启动后,在距离目标位置较大的区域,位置控制器产生最大速度指令,从而使交流电机加速运动后以最大速度恒速运行,在距离较小的区域,位置控制器生成逐次减小的速度控制指令,从而使交流电机减速运动,直至到目标位置后静止。
在没有外界干扰的情况下,当输入正弦信号时,交流伺服控制系统的输出如图3所示。

图3 交流伺服控制系统正弦信号输出
4 动力学前馈交流伺服控制系统
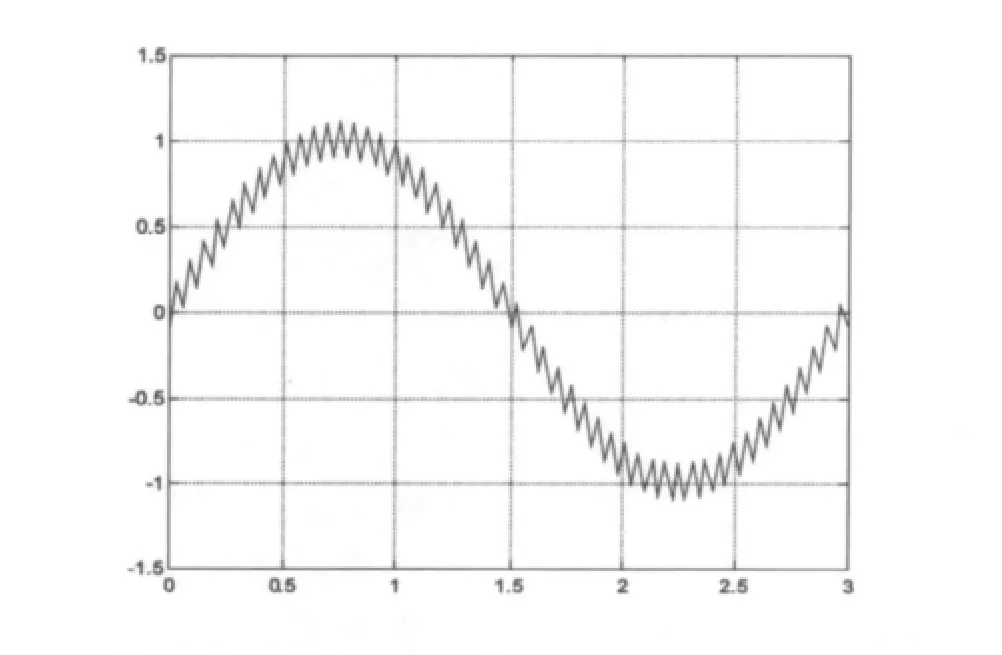
图6 外界干扰交流伺服控制系统正弦信号输出
从图6中明显看出,存在外界干扰力的影响,交流伺服控制系统很难保证其精度,动力学前馈控制系统能够很好消除外界影响,提高精度。
交流伺服控制系统在使用交流伺服电机作为驱动部件时,工作中难免受到外界干扰力的影响,比如加工零件时的切削力等等,并且干扰力呈现不规则状态,因此给系统引入白噪声来代替外界干扰力,其控制流程图如图5所示。
存在外界干扰的情况下,当输入正弦信号时,交流伺服控制系统的输出如图6所示。
存在外界干扰的情况下,动力学前馈控制系统正弦信号输出如图7所示。

图7 外界干扰动力学前馈交流伺服控制系统正弦信号输出
动力学前馈交流伺服控制系统控制框图如图8所示。
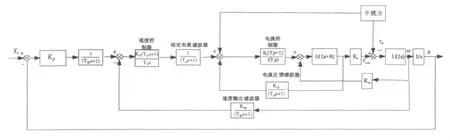
图8 动力学前馈交流伺服控制系统控制框图
5 结论
通过比较图6、7,可以明显看出,基于动力学前馈的控制系统可以很好地消除外界干扰力的影响,提高控制系统的精度,其仿真结果图3和图7保持一致。
[1]李珍国.交流电机控制基础[M].北京:化学工业出版社,2009.
[2]徐金墀.高速高精度PCB数控钻床进给伺服控制系统的控制探究[D].北京交通大学控制工程硕士学位论文.2009:20-56.
[3]寇宝全,程树康.交流伺服电机及其控制[M].北京:机械工业出版社,2008:15-80.
[4]施丽婷.数控交流伺服系统三环整定及应用[J].南京工业大学学报 2006,28(4):36-40.
