基于GPS技术的舰载探测系统标校方法研究
2013-06-05朱华邦
杜 娟 朱华邦
(92941部队 辽宁葫芦岛 125001)
1 引言
目标探测系统精度是导弹武器系统的一项重要指标,对武器系统的命中概率有着重要影响。各种探测系统在装舰时都进行过统一标校,但是随着服役时间的增加,探测系统的误差会发生漂移,这将影响探测系统的系统误差,因此,武器系统在实际使用和执行重要任务前必须对其探测系统进行标校。
随着武器装备的发展,探测系统不断创新,与之相应的标校工作也不断发展进步。普遍使用的方法有标校塔标校、有源标校器、光学标校以及海上卫星标校等方法,但操作方便且精度高的方法不多。利用标校塔标校,受到标校塔少、标校距离短等时间和空间的限制[1]。运用有源标校器,虽然已经做到了多波段、频率可调的一体化标校,但是标校过程中受到地物和海杂波等背景的影响大,严重影响标校精度[1~3]。光学标校一般只能进行高精度的方位标校,且需要一定的专业技能。星体标校受卫星时间和距离的影响很大,同时舰姿态误差也严重影响测星标定的结果[4]。
基于上述原因,有必要研究设计新的标校方法以弥补不足。GPS在全球范围内为用户提供全天候、连续精确的位置、速度和时间信息,利用其高精度定位技术进行标校,精度高、操作简单、实时性强、可同时标校多个探测系统、操作人员不受微波辐射,在很大程度上弥补了其它标校方法的不足。
2 标校原理
以GPS高精度定位技术为基础,将载舰系泊于码头,在探测系统和标校目标处分别安装一套GPS设备,用于测定探测系统与标校目标所在位置的大地坐标,将标校目标的大地坐标转换至探测系统坐标系下,以此作为目标在探测系统坐标系下的位置真值,与探测系统测得的标校目标位置数据进行比对分析,得出标校误差。
若对同一载舰上的多个探测系统或多艘舰上的探测系统同时(对同一目标)进行标校,只需在每个探测系统处安装一套GPS设备,根据各个探测系统的GPS数据分别进行误差分析即可。标校原理如图1所示。利用GPS设备进行标校可节约大量时间、兵力,减少人员辐射。
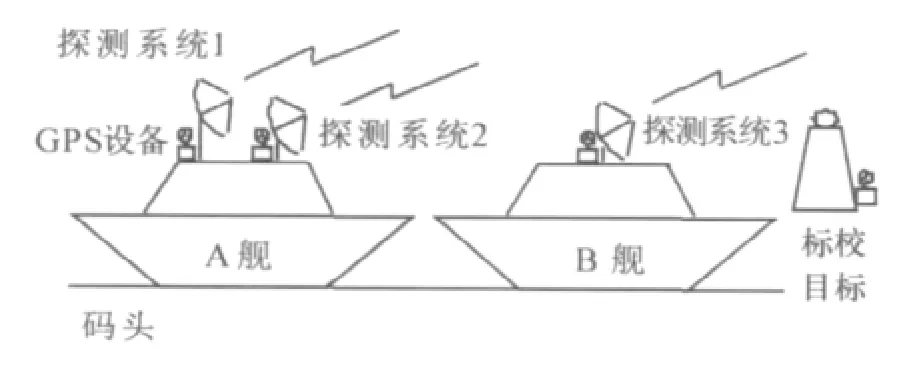
图1 基于GPS技术的舰载探测系统标校原理图
3 真值获取
3.1 同步测量
武器系统的时间信息由舰上时统给出,时统时间是由舰上GPS时间经校频后获得,所以利用GPS设备进行标校能够完成标校设备与被试系统的同步测量。
3.2 目标位置真值计算
由于GPS的坐标系统采用的是WGS-84大地坐标,使用时必须将标校目标的GPS坐标值转换到以探测系统为原点的站心坐标[5]。下面简要介绍一下坐标转换的方法。
首先要将GPS测得的大地坐标转换为空间大地直角坐标;再将空间大地直角坐标转换为站心直角坐标;最后再将站心直角坐标转换为站心球坐标。
大地坐标(B,L,h)转换为空间大地直角坐标(X,Y,Z)如下
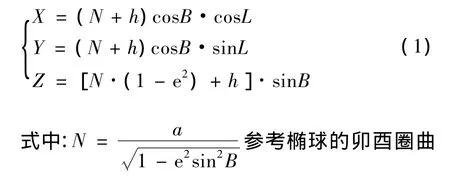

空间大地直角坐标(X,Y,Z)转换为站心直角坐标(x,y,z)如下
式中:[Xo,Yo,Zo]为站心点的空间大地直角坐标;Bo、Lo为站心点的大地坐标的纬度和经度。
站心直角坐标(x,y,z)转换为站心球坐标(D,β,ε)

式中:(D,β,ε)为标校目标相对被标探测系统的斜距、方位角和俯仰角。
4 标校中几个关键问题分析
4.1 GPS设备工作方式及精度
对运动目标进行导航定位时,GPS设备采用动态工作方式,对静止目标进行定位时,GPS设备可采用静态工作方式,其测量精度更高。标校时载舰系泊于码头,处于准静止状态,此时GPS设备可采用静态工作方式以提高标校精度。
按有关标准归定,标准测量设备的测量精度应优于被标定设备允许误差的三分之一。如某舰载雷达方位精度0.3°、距离精度60m,则标校设备方位精度应优于0.1°、距离精度应优于20m。近年来由于差分GPS定位精度已经提高到厘米级,通过坐标转换即可获得满足精度的目标真值,所以GPS设备可以作为标准测量设备对探测系统进行标定。
4.2 标校目标的选择
以往舰载探测系统标校多以海上固定灯桩为标校目标,因灯桩海拔高度较低,很难进行俯仰角标校,所以标校工作多以距离标校、方位角标校为主。利用GPS设备进行标校,电视、红外等可视探测系统可选择视距内任意距离、方位、俯仰的固定标的物作为标校目标,通过安装在标校目标处的GPS设备即可测定标校目标位置。对于雷达、照射器等微波探测系统,可采用气球或海拔较高的标的物作为标校目标。采用气球作为标校目标时,通过控制气球高度即可进行俯仰角标校。
4.3 误差分析
GPS定位误差、真值解算误差和雷达观测数据误差是直接影响标校精度的三个主要误差源。GPS的定位误差主要有与GPS卫星有关的误差、与信号传播有关的误差和与接收设备有关的误差,通过利用同步观测值求差可以消除全部的卫星星历误差,消除绝大部分信号传播误差和小部分接收设备误差[6]。真值解算时除帮助消除大部分GPS误差外,其本身的解算精度相当高,距离和方位误差分别在10-4和10-5数量级。雷达测量数据通过扫描误差校正和目标航迹平滑滤波,消除大部分测量噪声的影响,只有雷达目标中心位置的偏差难以避免,若在理想点目标标校时,以上误差可以忽略。雷达误差可控制在较小范围[7]。
4.4 微波探测系统对GPS接收信号的影响
微波探测系统对近距离的GPS设备接收信号是否有影响,在舰载探测系统标校时,为了更精确地测量探测系统位置,要将GPS设备安装在距探测系统较近的位置。
GPS卫星采用码分多址(CDMA)技术在两个频率上广播测距码和导航数据,也就是说,系统只使用两个频率,称为L1和L2。GPS L1位于指定仅用于其他卫星导航信号的频段之内。GPS L2位于1215~1240MHz波段,在世界范围内有各不相同的无线电定位频率分配,工作于此波段的无线电定位服务包括大量用于空中交通管制、军事侦察和禁毒的雷达,尽管其中有些雷达工作时发射功率很高(千瓦到兆瓦),但它们都属于脉冲系统,而GPS接收机在脉冲干扰下是很稳健的[8]。因此,微波探测系统不会对GPS设备接收信号造成影响。
5 误差计算
对舰载探测系统进行标校时,测量探测系统位置的GPS设备虽然架设在距离探测系统较近的位置,但仍会引入部分系统误差。通常探测系统与标校目标之间的距离 d0约为10000m,探测系统与GPS设备之间的距离r约为5m,下面将以此为例进行详细的误差分析。
5.1 距离误差分析
探测系统、标校目标、GPS设备形成的位置关系如图2所示,A点(探测系统)与B点(GPS设备)之间的距离为r,A点(探测系统)与C点(标校目标)之间的距离为d0,B点(GPS设备)与C点(标校目标)之间的距离为di,AC与AB的夹角为α。
根据余弦定理,可得

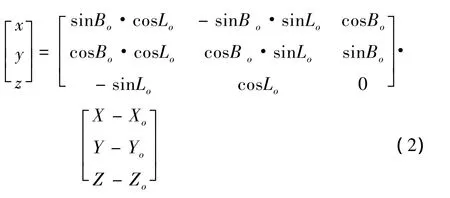
将d0=10000m、r=5m代入式(4),可得di随α变化的情况,如图3所示。
图3 di与α的函数关系
由图3可知,当α等于0°时,即标校目标、探测系统、GPS设备在一条直线上且GPS设备位于标校目标与探测系统之间,此时di值最小,等于9995m;当α等于180°时,即标校目标、探测系统、GPS设备在一条直线上且GPS设备在标校目标与探测系统连线的延长线上,此时di值最大,等于10005m。这是两种极限位置,其余值均在9995~10005m之间。由此可知,因GPS设备架设位置引入的最大距离误差为5m,小于探测系统允许误差的三分之一(现有探测系统允许误差均大于15m),对距离标校的影响很小,可忽略不计。
5.2 方位误差分析
探测系统、标校目标、GPS设备的方位关系如图4所示,探测系统测得的目标方位为(∠1+∠α),根据GPS数据计算出的目标方位为(∠2+∠3),根据平行线定理可知∠1=∠2,所以引入方位误差为:

根据三角形定理,可知

将式(6)代入式(5),得

即方位误差等于AC与BC的夹角c。
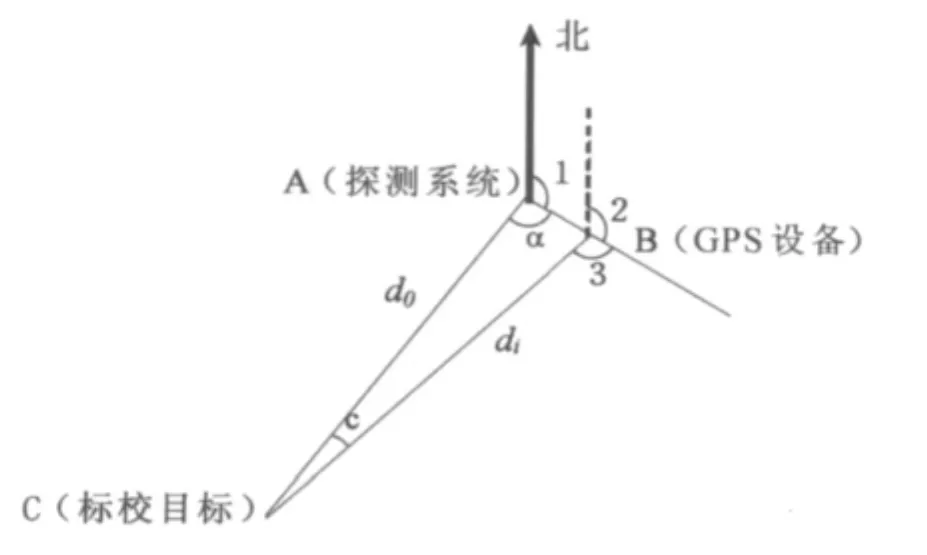
图4 探测系统、标校目标、GPS设备的方位关系
根据正弦定理,得

将式(4)代入式(8),可得

将d0=10000m、r=5m代入式(9),可得方位误差c随α变化的情况,如图5所示。
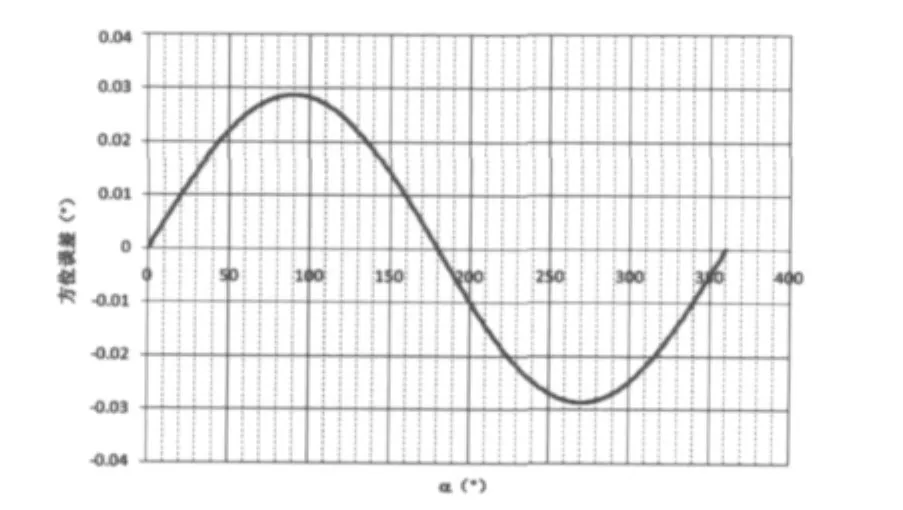
图5 方位误差与∠α的函数关系
由图5可以看出,当 α 等于0°、180°或360°时,即标校目标、探测系统、GPS设备在一条直线上时,方位误差为0°;当α等于90°或270°时,方位误差最大,约等于0.03°,小于探测系统允许误差的三分之一(现有探测系统允许误差均大于0.1°),对方位标校的影响很小,可忽略不计。
5.3 俯仰误差分析
对舰载探测系统进行标校时,应尽量将GPS设备架设在探测系统回转中心所在的水平面上,以尽可能减小俯仰误差。
6 结束语
GPS设备在导航定位领域已应用多年,技术成熟、精度高、操作简便,现已成为全球重要的定位设备之一。利用GPS高精度定位技术进行舰载探测系统标校,是对GPS技术的深度开发,同时也提高了标校质量、效率,是适应武器系统不断发展的客观需求。
[1]毛南平,徐昌庆,张忠华.舰载测控雷达海上无塔标相技术[J].电讯技术,2004,(1):38 -43.
[2]莫锦军,袁乃昌.SAR校准常用参考目标分析和比较[J].航天返回与遥感,2002,(2):10-16.
[3]Shinada M,Oaku H,et al.,SAR calibration using frequency-tunable active radar calibrators[J].IEEE transactions on geoscience and remote sensing,1999,37(1):564 -573.
[4]姚兆宁.舰载精密测量雷达星体标校方法及应用[J].现代雷达,1999,(4):8 -12.
[5]姚景顺,杨世兴.舰载雷达的动态标校[J].火力与指挥控制,2008,(3):128 -134.
[6]边少锋,李文魁.卫星导航系统概论[M].北京:电子工业出版社,2005,02.
[7]潘绍仁,察豪.基于AIS的舰载雷达标校方法研究[J].舰船科学技术,2009,(6):101-104.
[8]寇艳红.GPS原理与应用(第二版)[M].北京:电子工业出版社,2007,07.
