鱼雷永磁推进电机齿槽力矩分析与抑制
2013-05-28王小雷
王小雷
鱼雷永磁推进电机齿槽力矩分析与抑制
王小雷
(中国船舶重工集团公司 第705研究所昆明分部, 云南 昆明, 650118)
鱼雷永磁推进电机的齿槽力矩是影响力矩脉动的重要因素之一, 对齿槽力矩的产生机理进行了数学解析, 基于极槽数配合法和辅助槽法对齿槽力矩的抑制进行了探讨, 建立了不同极/槽数配合电机的2D有限元模型并进行了瞬态仿真, 对不同辅助槽数及其尺寸大小对应的齿槽力矩进行了分析, 结果验证了相关理论与分析方法的可行性与正确性。
鱼雷; 永磁直流电机; 齿槽力矩; 有限元模型
0 引言
永磁电机以其优越的特性在各行各业内被广泛使用。作为电动力鱼雷的推进电机, 永磁无刷直流电机具有重量比功率大、效率高、调速性能好, 可靠性高, 以及免维护等特点, 成为水下航行器电动力推进领域的研究热点。随着军事技术的不断发展, 世界鱼雷发展的总体趋势是“更快、更远、更深、更静”[1], 因此对电动力鱼雷推进电机有着较高的要求。永磁推进电机运行时的振动噪声会对鱼雷隐蔽性、声自导等性能产生影响, 而振动噪声与电机力矩脉动有着密切关系, 其中齿槽力矩是影响力矩脉动的重要因素之一。
对于永磁电机的齿槽力矩研究已经有了大量文献。文献[2]对不同形状的辅助槽型对齿槽力矩的影响作了分析, 但没有给出不同辅助槽数量配合对齿槽力矩的影响。文献[3]~[5]均对永磁电机的齿槽力矩进行了详细的研究。
本文首先采用解析方法分析了齿槽力矩的产生机理, 然后基于极/槽数配合法与齿冠处开辅助槽法对齿槽力矩的抑制作了探讨, 最后建立了鱼雷永磁直流推进电机的2D模型, 通过有限元仿真分析, 验证了相关理论与方法的正确性与有效性。
与普通永磁直流电机不同, 鱼雷推进装置用永磁直流无刷电机一般为对转结构[6], 即磁系统与电枢系统在电磁力矩的作用下, 两者反方向对转。由于齿槽力矩是永磁体与电枢铁芯的齿槽相互作用产生的, 所以本文在分析计算鱼雷推进电机齿槽力矩时, 假定其磁系统静止, 而电枢系统运动。
1 齿槽力矩脉动数学解析
齿槽力矩一般可分为理想齿槽力矩和非理想齿槽力矩。
理想齿槽力矩是由于永磁电机电枢系统的铁芯齿槽与磁系统的永磁体相互作用力的切向分量的波动导致的力矩波动, 其表现为试图将磁系统或者电枢系统定位在某些位置上, 理想齿槽力矩随着磁系统与电枢系统空间相对位置的变化而作周期性变化, 且其与电枢电流无关。非理想齿槽力矩一般是由磁系统与电枢系统的缺陷造成的, 例如电枢系统偏心, 硅钢片、磁钢等材料特性不一致, 以及加工精度造成的。本文的主要研究对象为理想齿槽力矩。
1.1 理想齿槽力矩的产生机理
鱼雷推进电机气隙中的磁场能量为


气隙磁密可表示为
气隙体积可表示为

则有
由式(4)可以看出, 永磁推进电机气隙中储存的磁场能量与电机结构尺寸、电枢系统与磁系统间的相对位置以及磁钢性能有关。
如图1, 磁钢产生的磁动势可表示为
图1 理想齿槽力矩产生机理
Fig. 1 Generation mechanism of ideal cogging torque
由式(5)可得到磁钢磁动势的平方值为

由于铜的相对磁导率可近似为1, 即与空气相同。气隙磁导又与电枢、磁系统的相对位置有关, 所以气隙磁导沿切向的表达式仅与电枢系统的齿槽结构相关。
微元圆周角的气隙磁导可表示为

则有

同时, 一对极极距内的气隙磁导为

则鱼雷永磁直流推进电机齿槽力矩为

由于三角函数具有正交性, 所以可得


2 理想齿槽力矩的抑制
气隙磁导谐波次数与磁动势平方值谐波次数可表示为

其中:为电枢槽数;为极对数。
要使=, 即

假设和之间存在一个最大公约数, 则

由式(14)可以得出

综合以上分析可以得出, 谐波力矩的最低次数为

由式(16)可以看出, 当和的最大公约数越小, 谐波力矩的最低次数越大, 齿槽力矩峰值越小。
3 鱼雷推进电机齿槽力矩抑制
3.1 基于槽/极数配合法的齿槽力矩抑制
基于以上分析, 可以通过齿槽配合法来减小槽数和极数2的最大公约数, 以达到对鱼雷推进电机齿槽力矩进行抑制的目的, 如表1所示。

表1 不同槽/极数配合下的齿槽力矩脉动周期
槽/极数配合法较为简单, 且有效可行, 但是受限于鱼雷推进电机的外径尺寸、齿部机械强度, 以及绕组下线工艺等因素, 槽数不能开得过多。
3.2 基于齿冠处开辅助槽的齿槽力矩抑制
在鱼雷推进电机电枢系统的铁芯齿冠表面增加辅助槽, 类似于增加了槽数, 从而使在电枢系统旋转360°机械角度内, 齿槽力矩的变化频率增加。若在齿冠处开取合适数量(一般情况下, 选择1个或2个)的辅助槽, 可使谐波力矩的最低次数增大, 从而抑制齿槽力矩。
图2为在齿冠处开1个辅助槽和2个辅助槽的示意图。

图2 齿冠处辅助槽
4 有限元仿真及结果分析
由于齿槽力矩与电枢电流无关, 因此本文采用有限元法分析计算鱼雷永磁直流无刷推进电机齿槽力矩时, 将电枢绕组截面定义为空气。
基于以上分析, 首先建立4极12槽、4极15槽、4极18槽的电机模型, 然后对其进行瞬态分析。图3分别为以上3种极/槽数配合电机的2D有限元模型和瞬态分析得到磁力线分布。

图3 不同极/槽数配合的永磁电机2D有限元模型与磁力线分布
经过瞬态分析, 得到不同极/槽数配合的电机齿槽力矩曲线, 如图4所示。从该曲线可以看出, 4极12槽配合下的齿槽力矩峰值为57.9 N·m, 其脉动周期为30°; 4极15槽配合下的齿槽力矩峰值为15.2 N·m, 其脉动周期为6°; 4极18槽配合下的齿槽力矩为23.1 N·m, 其脉动周期为10°, 以上齿槽力矩的脉动周期与理论分析结果相符。
由以上仿真分析结果可以得出, 单一增加电枢系统槽数并不一定能抑制齿槽力矩, 而通过不同的极/槽数配合, 减小极数与槽数的最大公约数在一定程度上可有效抑制齿槽力矩。

图4 不同极/槽数配合的永磁电机齿槽力矩
为了验证基于齿冠处开辅助槽抑制齿槽力矩方法的可行性, 现遵循以齿中心线对称分布的原则, 对4极12槽电机的齿冠处分别开1个辅助槽和2个辅助槽, 建立有限元模型并对其进行分析, 如图5所示, 其中通过参数化建模, 将辅助槽的槽深与槽宽定义为变量。

图5 4极12槽电机不同辅助槽数的磁力线分布
如图6所示, 当4极12槽电机电枢铁芯的齿冠处开1个辅助槽时, 电机的齿槽力矩脉动周期从30°变为15°, 但其峰值为60.4 N·m, 相比不开辅助槽时有小幅度增加; 当开2个辅助槽时, 电机的齿槽力矩脉动的机械角度变为10°, 其峰值减小为43 N·m。
为了分析齿冠处辅助槽的尺寸对齿槽力矩的影响, 将辅助槽的槽口宽与槽深作为变量进行有限元分析, 分别得到图7和图8, 其中图7为将辅助槽槽宽设定为主槽宽8 mm时的不同槽深齿槽力矩, 图8为将辅助槽槽深设定为3 mm时的不同槽宽齿槽力矩。

图6 4极12槽电机开不同辅助槽数的齿槽力矩
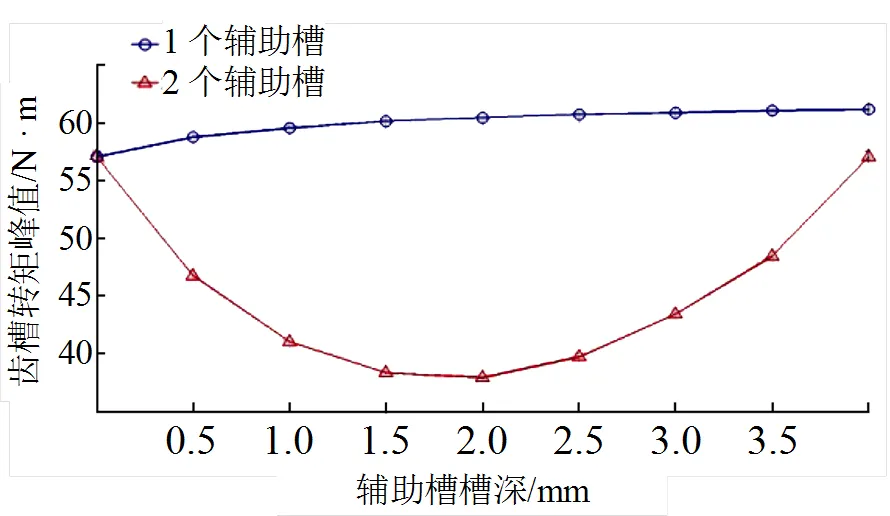
图7 槽宽为8 mm的不同槽深齿槽力矩
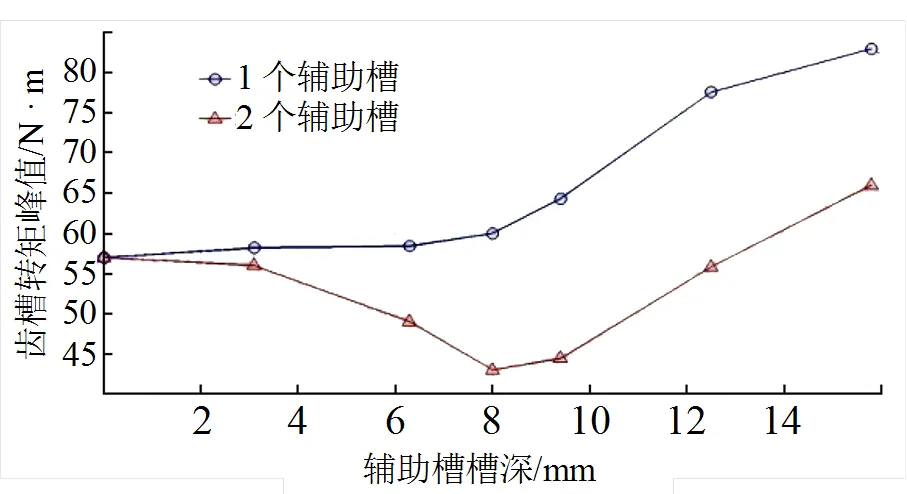
图8 槽深为3 mm的不同槽宽齿槽力矩
由图7可以看出, 当4极12槽电机齿冠处开1个辅助槽时, 不同槽深时的齿槽力矩变化不明显; 当齿冠处开2个辅助槽时, 齿槽力矩先随着槽深的增加而减小, 然后再增大, 当槽深为2 mm时, 齿槽力矩最小。由图8可以看出, 当4极12槽电机齿冠处开1个辅助槽时, 齿槽力矩以辅助槽宽等于主槽宽的点为分界点, 先是小幅度增加, 然后迅速变大; 当齿冠处开2个辅助槽时, 齿槽力矩先随着槽宽变大而减小, 然后再增大, 其中当槽宽等于主槽宽时, 齿槽力矩达到最小值。
由以上仿真分析可以得出, 齿槽力矩的大小由电枢系统的铁芯齿槽和磁系统的永磁体的磁场互相作用决定, 当齿冠处开一个辅助槽时, 有可能使齿槽力矩在一定幅度上增大, 而当开两个辅助槽, 齿槽力矩则有一定程度的减小。同时, 由于辅助槽的槽深与槽宽对气隙磁导谐波与磁动势平方值谐波有一定程度影响, 故而当辅助槽的槽尺寸为合理值时, 对齿槽力矩有抑制作用, 反之则有可能增加齿槽力矩。
5 结束语
本文对电动力鱼雷的永磁直流推进电机齿槽力矩进行了研究, 通过解析计算与仿真分析得到了一些具有工程应用价值的结论。研究表明: 鱼雷推进用永磁直流电机的齿槽力矩可通过合理的极/槽数配合和开一定数量辅助槽的方法来抑制, 其中辅助槽的尺寸对齿槽力矩有一定影响。但考虑电枢铁芯齿冠处机械强度的限制, 电枢系统的槽数与辅助槽数不可能开的太多, 而抑制永磁直流电机齿槽力矩的方法还有分数槽、斜槽, 以及改变极弧系数等方法, 仍有待进一步研究。
[1] 李溢池, 王树宗.现代鱼雷——水下导弹[M].北京: 海洋出版社, 1995.
[2] 夏加宽, 于冰. 定子齿开槽对永磁电机齿槽转矩的影响[J]. 微电机, 2010, 43(7): 13-16.Xia Jia-kuan, Yu Bing. Influence of Stator Teeth Notching on the Cogging Torque of Permanent Magnet Motor[J]. Micromotors, 2010, 43(7): 13-16.
[3] 王秀和. 永磁电机[M]. 北京: 中国电力出版社, 2010.
[4] 罗宏浩, 廖自力. 永磁电机齿槽转矩的谐波分析与最小化设计[J]. 电机与控制学报, 2010, 14(4): 36-40, 45. Luo Hong-hao, Liao Zi-li. Hamrmonic Analysis and Minimization of Cogging Torque in Permanent Magnet Motors[J]. Electric Machines and Control, 2010, 14(4): 36-40, 45.
[5] Popescu M, Cistelecan M V, Melcescu L, et al. Low Speed Directly Driven Permanent Magnet Synchronous Generator for Wind Energy Application[J]. IEEE, 2007: 722-795.
[6] 王树宗. 鱼雷动力装置设计原理(电动力装置)[M]. 武汉: 海军工程大学, 1982.
Analysis and Suppression of Cogging Torque of Permanent Magnet Motor for Torpedo Propulsion
WANG Xiao-lei
(Kunming Branch of the 705 Research Institute, China Shipbuilding Industry Corporation, Kunming 650118, China)
The cogging torque of permanent magnet (PM) motor for torpedo propulsion influences the torque ripple. In this paper, the generation mechanism of cogging torque is analyzed mathematically. Based on the pole-slot combination method and the teeth notching method, suppression of the cogging torque is discussed. Two-dimensional finite element models of the PM motor with different pole-slot number are established, transient simulations are performed, and the cogging torques relating to different number and dimension of teeth notches are analyzed. The results verify the feasibility and validity of the proposed theory and analysis method.
torpedo; permanent magnet direct current motor; cogging torque; finite element model
TJ631.2; TM351
A
1673-1948(2013)02-0132-05
2012-08-29;
2013-02-25
王小雷(1986-),男,助理工程师,研究方向为鱼雷电动力技术.
(责任编辑: 陈 曦)
