罗兰C磁天线在鱼雷导航定位中的应用
2013-05-28崔国恒许江宁曹可劲
崔国恒, 许江宁, 曹可劲
罗兰C磁天线在鱼雷导航定位中的应用
崔国恒, 许江宁, 曹可劲
(海军工程大学 管理工程系, 湖北 武汉, 430033)
为了探讨鱼雷使用罗兰C磁天线实现水下导航定位的可行性, 介绍了罗兰C全向磁天线的工作原理, 分析了罗兰C信号在传播过程中磁场信号和电场信号的场强衰减规律, 并进行了数学仿真。结果表明, 在1 000 km距离上, 利用磁天线在海水中4~5 m深度接收信号具有较高的信噪比, 能够满足水下定位解算要求。试验也验证了鱼雷在浅层水域(深度小于5 m)水下接收罗兰C信号实现定位解算是可行的, 进一步证明了仿真结果的正确性。本文研究可为罗兰C磁天线在鱼雷浅层水域水下导航定位提供理论依据。
鱼雷; 磁天线; 罗兰C信号; 水下导航
0 引言
罗兰C导航系统是一种中远程低频无线电导航系统, 工作频率为100 kHz, 属于陆基、脉冲相位调制导航方式。目前全球工作的罗兰C共有30 多个台链, 覆盖了北半球大部分地区, 国际研究的热点主要集中在罗兰C磁天线的研究, 以减小天线体积, 实现同其他导航天线的组合[1]。
罗兰C的使用主要集中在水面船舶导航中, 而水下接收罗兰C信号在国内尚无资料可查。
罗兰C的工作频率较低, 在理论上具有一定的入水深度, 研究其信号水下传播特性, 设计高性能罗兰C全向磁天线, 对实现浅层水域水下定位导航具有重要意义, 可以为解决鱼雷水下导航定位问题提供一种新思路。
1 全向磁天线工作原理
1.1 磁天线原理
磁天线的本质是一种环形天线, 可用来接收电磁波信号中的磁场分量[2]。它是由一个铁氧体磁棒和线圈组成, 对电磁波的吸收能力很强, 其外形如图1所示。

图1 单棒磁天线外观
单棒磁天线感应电压可由下式给出[3]

式中:为相对磁导率;为信号频率;为磁场强度;为磁棒的横截面积;为线圈匝数;为来波方向与磁棒的夹角。
可见, 磁天线接收信号的能力与磁芯材料的相对磁导率、线圈的匝数和线圈的截面积相关。采用高相对磁导率的磁性材料, 线圈的匝数越多, 线圈的截面越大, 其接收信号能力就越强, 灵敏度就高。然而, 受磁性材料的性能、磁棒强度和天线体积限制, 磁天线的接收性能同电天线相比, 只能达到一个较好的水平。
1.2 磁天线原理结构设计
全向磁天线原理结构见图2[4]。2根正交放置的单棒磁天线感应到的信号经前置低噪声放大器放大、模拟带通滤波器滤波、自动增益放大器放大等信号调理过程后, 对2个通道的模拟信号进行模数转换, 完成双通道信号的数字量化; 数字量化后的两路数字信号由高性能可编程逻辑器件(field programmable gate array, FPGA)进行处理, 分别完成信号的数字滤波、数字陷波及数字移相及两路信号的数字调理过程; 通过FPGA器件的控制和处理, 对两路信号进行搜索和识别, 完成两路信号的合成; 最后将合成后的信号进行数模转换供给罗兰C接收机进行定位解算。
1.3 罗兰C信号的相位编码特点
对罗兰C脉冲组信号中的每个脉冲载频起始相位进行严格规定, 使其按照一定的格式排列, 称为脉冲组相位编码。通过相位编码, 可实现罗兰C系统全自动接收并可有效抑制天波干扰。罗兰C脉冲群中各脉冲的相位编码如表1所列[5-6]。

图2 全向磁天线结构设计图
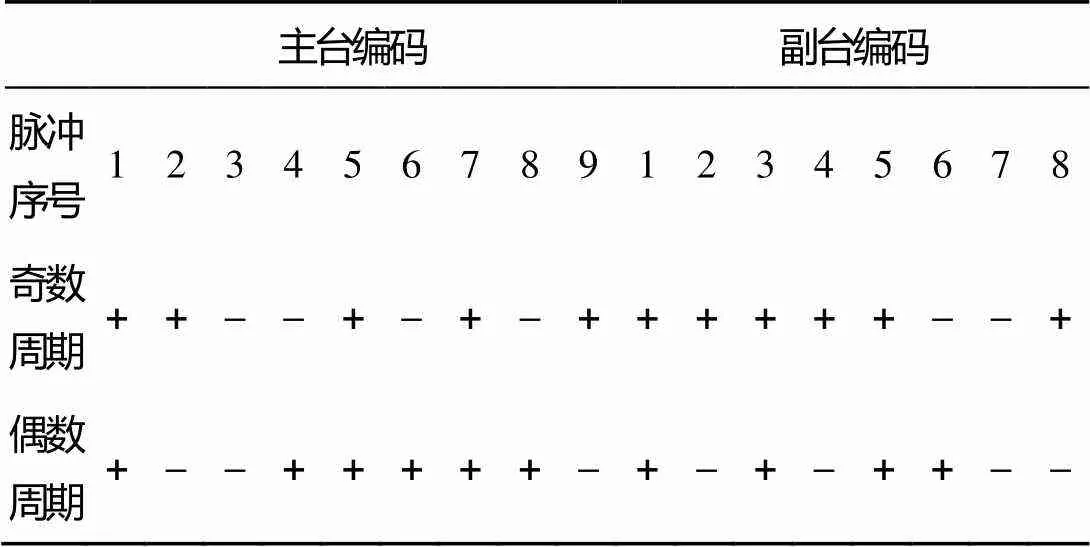
表1 罗兰C信号相位编码
1.4 全向磁天线象限分布
罗兰C信号在到达单棒磁天线对立模型波瓣时有一个180°的相位改变, 这种相位特性就要求在设计全向磁天线时, 必须考虑每根单棒磁天线接收信号的相位特性。本文采用十字交叉环路设计磁天线, 其接收信号的全向区域可分为4个象限, 如图3所示, 处于不同象限的信号在进行信号合成时, 必须进行适当的相位变换。相位变换结果如下[7]: Ⅰ象限:+; Ⅱ象限:-; Ⅲ象限: --; Ⅳ象限: -+。

图3 全向磁天线象限分布
2 空气中的电磁波传播
罗兰C系统的发射天线设置在紧靠地面上, 采用直立天线, 辐射出垂直极化电磁波, 由于传播路径的半导电性质(陆地)或导电性质(海面), 在介质面上会感应出电荷, 产生水平电场, 从而导致波前倾斜, 此时一部分电磁能量沿地球表面传播, 另一部分向地下传播。波的结构场如图4所示。

图4 波的结构场示意图
根据文献[8]可知, 地波传播过程中, 远场任意一点接收信号的各个场分量可由下式计算

假设罗兰C信号在传播过程中处于均匀球地面模式, 根据地波传播理论, 垂直电偶极子在接收点的地波场强垂直分量为




式中,是一足够大正整数, 由级数求和的计算精度而定, 对于罗兰C信号的传播距离,取100就能保证级数的计算精度。式中,为归一化数字距离

式中,为归一化表面阻抗, 且



其中

3 水中的电磁波传播
罗兰C信号穿透海水时, 水平电场、水平磁场不会发生变化, 垂直电场会大大衰减, 因此, 水下接收罗兰C信号, 一般采用水平电天线或磁天线进行接收。罗兰C信号在水中传播时, 其磁场信号的幅度会随着深度的增加而呈指数规律迅速衰减, 其传播规律满足

由式(14)和式(15)推得

4 仿真计算
4.1 地波衰减因子W的计算
罗兰C导航系统在实际使用中, 主要用于船舶的导航定位, 其信号的传播途径既有海水, 又有陆地。因此, 本文在仿真计算中分别采用了海水、陆地及淡水的有关电参数进行计算。根据式(6)~式(13), 取100阶进行仿真计算。在不同大地导电参数下, 罗兰C信号地波衰减因子随传播距离的变化情况如图5所示。图中,表示大地相对介电常数;表示路径的大地电导率。
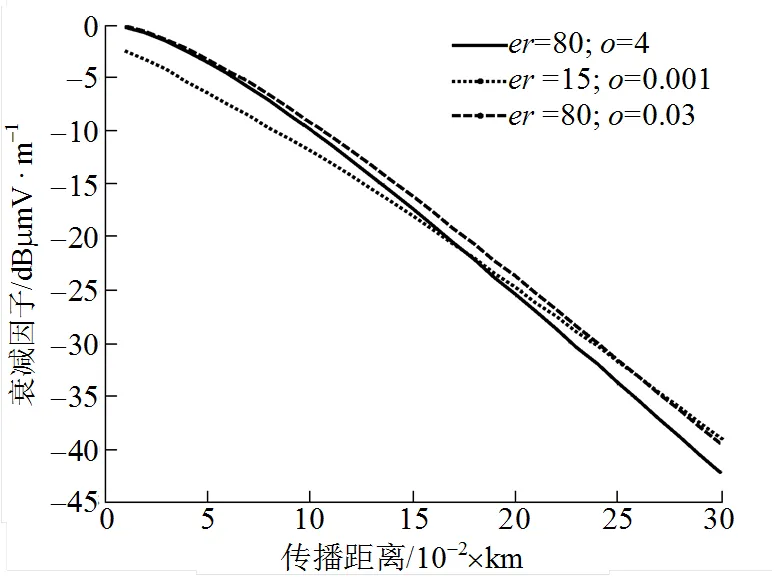
图5 不同传播距离下衰减因子的变化规律
4.2 垂直电场的计算
假设罗兰C导航台的发射功率为2MW, 辐射效率为80%, 可以计算不同传播距离时垂直电场的有效值, 计算结果如图6所示。
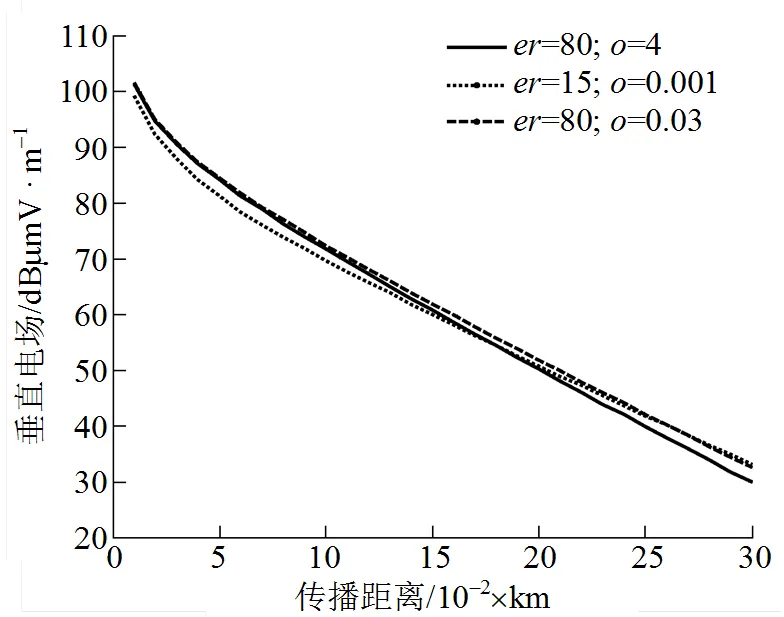
图6 不同传播距离下垂直电场的变化规律
4.3 水平磁场的计算
根据式(2), 可计算不同距离时水平磁场的有效值, 仿真计算结果如图7所示。

图7 不同传播距离下水平磁场的变化规律
4.4 信噪比计算
微逻辑公司使用的噪音估计法将地球表面粗略分为高、中、低3个纬度区, 各区依简单的统计给出白天和夜间2个典型的噪音电平[11]。噪声电平强度参见表2。

表2 噪声电平强度
当确定了各接收点的噪音电平之后, 只须计算出各接收点的信号场强就能给出SNR。本文以中纬度地区为例, 计算白天和夜间的海面路径的磁场信号信噪比, 计算结果如图8所示。

图8 不同传播距离下信噪比的变化规律
4.5 水下磁场强度计算
分别计算距离发射台1 000 km和1 500 km的接收点, 信号穿透海水介质和淡水介质时, 水下磁场强度随穿透深度的变化规律, 计算结果如图9, 图10所示。
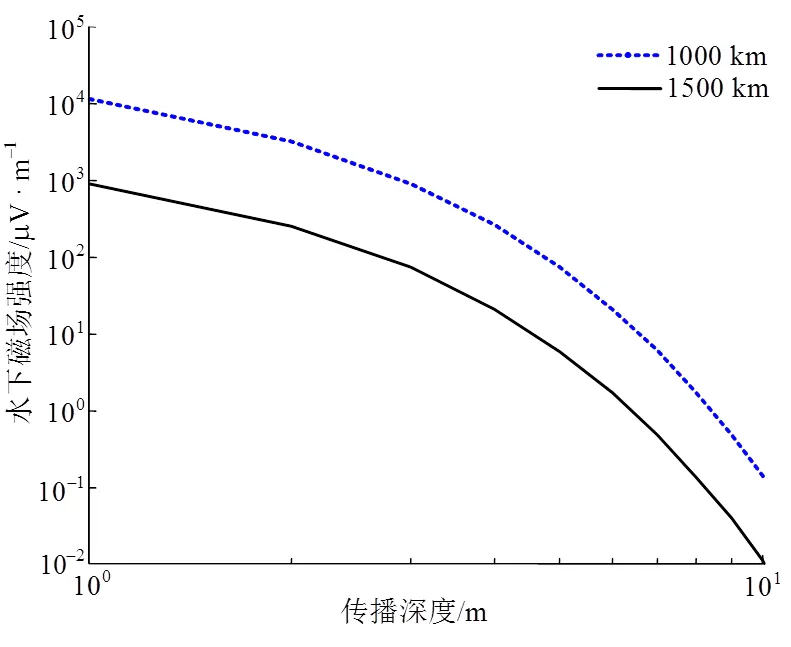
图9 海水中水下磁场强度的变化规律

图10 淡水中水下磁场强度的变化规律
磁天线水下接收罗兰C信号的能力主要取决于水中的噪声强度和电路的噪声强度。由仿真计算结果分析可知, 在海水环境中, 距离发射台 1000 km的地点, 结合水中的噪声强度和电路的噪声强度(一般不超过100µv/m), 采用微弱信号检测技术, 完全可以实现水下4~5m深度接收信号; 在淡水环境中, 距离发射台1 000 km的地点, 可以实现水下40~50 m深度接收信号。
5 实测数据分析

图11 海面信号幅度波形图
将磁天线放入海水中, 深度为2 m时, 采集到该台信号如图12所示。将磁天线放入海水中, 深度为4 m时, 采集到该台信号如图13所示。
从试验结果来看, 罗兰C磁信号入水时信号幅度没有衰减, 但在水中传播时衰减较大; 信号入水后, 信号信噪比维持不变, 随着入水深度的增加, 信号幅度剧烈衰减, 电路噪声逐渐占主导地位; 水下接收信号的信噪比主要受电路噪声影响。
从信号定位解算过程来看, 罗兰C磁天线在水下4m内接收的信号具有较强的信噪比, 可以实现定位解算; 深度超过4m时, 信号的信噪比较低, 搜索跟踪时间太长, 第3周期过零点跟踪不太准确, 定位误差较大。

图12 水下2 m处信号幅度波形图
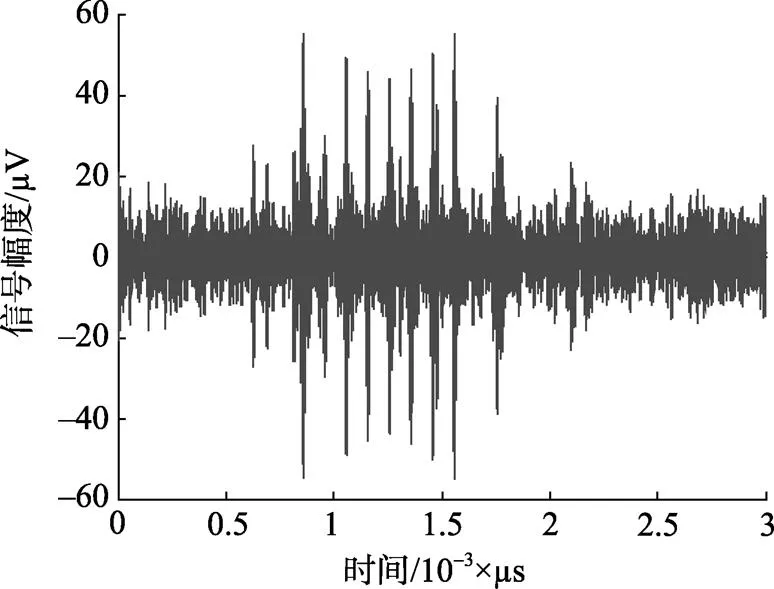
图13 水下5 m处信号幅度波形图
6 结论
本文从理论上研究了罗兰C信号的水下传播特征, 分析了水下磁场信号和电场信号的场强传播衰减规律, 进行了仿真计算。仿真结果表明:
1) 利用磁天线可在浅层水域接收罗兰C信号以实现水下定位;
2) 利用全向磁天线进行水下接收罗兰C磁信号的定点试验, 可以发现罗兰C磁信号入水时信号幅度没有衰减, 但在水中传播时衰减较大;
3) 信号入水后, 信号信噪比维持不变, 随着入水深度的增加, 信号幅度剧烈衰减, 电路噪声逐渐占主导地位;
4) 水下接收信号的信噪比主要受电路噪声影响。因此, 鱼雷在浅层水域水下接收罗兰C信号实现定位解算是可行的。
文章未对罗兰C信号入水时的相位变化规律及水下信号包络变化展开研究, 这将是下一步的研究重点。
[1] 吴海涛, 边玉敬, 李志刚. 罗兰C最新进展及其对我国相关系统改造的启示[J]. 陕西天文台台刊, 2000, 23(1): 10-18. Wu Hai-tao, Bian Yu-jing, Li Zhi-gang. Recent Development of Loran-C and Some Suggestions[J]. CSAO Publications, 2000, 23(1): 10-18.
[2] 郭鸿滨. 有源全向磁天线研究与实现[D]. 哈尔滨: 哈尔滨工程大学, 2007: 25-26.
[3] 王芬, 王永斌, 谢慧. 超低频全向接收天线信号合成 仿真分析[J]. 舰船科学技术, 2008, 30(1): 25-26.Wang Fen, Wang Yong-bin, Xie Hui. Analysis of Signals Synthesisof Super Low Frequency Towed Omni-directional Receive Antenna[J]. Ship Science and Technology, 2008.30(1): 25-26.
[4] 崔国恒, 许江宁, 曹可劲, 等. 基于罗兰C磁天线的高精 度数字移相算法研究[J], 计算机工程与设计, 2011, 32(4): 1513-1516.Cui Guo-heng, Xu Jiang-ning, Cao Ke-jin, et al. Research on Signal Synthesis of Loran-C Omni-Directional H-field Antenna with High-precision Digital Phase Shift Algorithm[J]. Computer Engineering and Design, 2011, 32(4): 1513-1516.
[5] 邹德财. 罗兰C数字接收机关键技术研究[D]. 北京: 中国科学院国家授时中心, 2006.
[6] 陈秋月, 杨会成, 江太辉. 基于匹配相关法的罗兰C信号周期识别[J]. 无线电工程, 2007, 37(12): 27-29. Chen Qiu-yue, Yang Hui-cheng, Jiang Tai-hui. A Method of Cycle Identification for Loran-C Signal Based on Matched Correlation[J]. Ship Electronic Engineering, 2007, 37(12): 27-29.
[7] 杨林, 罗兰C接收机用磁天线[J]. 探测与定位, 2004, 2(2): 84-88.Yang Lin. Research of Magnetic Antenna Used for the Loran-C Receiver[J]. Detection and Location, 2004, 2(2): 84-88.
[8] 崔国恒, 曹可劲, 许江宁, 等. 磁天线水下接收罗兰C信号可行性研究[J]. 弹箭与制导学报, 2010, 30(6): 180-183.Cui Guo-heng, Cao Ke-jing, Xu Jiang-ning, et al. Research on Feasibility of Receiving Loran-C Signal Underwater Based on H-field Antenna[J]. Journal of Projectiles, Rockets, Missiles and Guidance, 2010, 30(6): 180-183.
[9] 詹金林, 陈永冰, 李文魁, 等. Millington方法与罗兰C 电波传播预测[J]. 船电技术, 2009, 29(6): 6-9. Zhan Jin-lin, Chen Yong-bing, Li Wen-kui, et al. Milling- ton’s Method and Forecasting of Loran C Signal′s Propaga- tion[J].Ship Electric Technology, 2009, 29(6): 6-9.
[10] 潘威炎. 长波超长波极长波传播[M]. 成都: 电子科技大学出版社, 2004: 126-128.
[11] 杨致友. 罗兰导航数学方法[M]. 西安: 西北工业大学出版社, 1991: 246-248.
by H-field Antenna to Underwater Navigation Localization of Torpedo
CUI Guo-heng, XU Jiang-ning, CAO Ke-jin
(Department of Management Science, Naval University of Engineering, Wuhan 430033, China )
For arguing the feasibility of torpedo underwater localization and navigation with Loran-C signal received by H-field antenna, the principle of omnidirectional H-field antenna is introduced, the field intensity attenuation laws of the H-field and E-field signals in propagation of Loran-C signal are analyzed. Simulation results indicate that H-field antenna can receive Loran-C signals with high signal-to-noise ratio(SNR), meeting the requirements of underwater localization solution. Experimental results show that H-field antenna can receive the signals with higher SNR at the depth of 4~5 m underwater over a distance of 1 000 km. Test confirms that the localization solution can be obtained with Loran-C signal received by H-field antenna in the depth less than 5 m underwater, which verifies the correctness of the simulation. This study may provide a theoretical basis for torpedo underwater navigation with H-field antenna.
torpedo; H-field antenna; Loran-C signal; underwater navigation
TJ630.33
A
1673-1948(2013)02-0120-06
2012-05-04;
2012-09-03.
国家自然科学基金项目(61004126).
崔国恒(1981-), 男, 博士, 讲师, 研究方向为无线电导航和军事航海技术.
(责任编辑: 杨力军)
