基于模糊自适应PID的饱和蒸汽发电控制研究
2013-05-15吴青柏张立杰
陈 琳,吴青柏,张立杰
(1.河北联合大学 机械工程学院,河北 唐山 063009;2.唐山理工自控工程有限公司,河北 唐山 063020)
0 引言
随着电厂蒸汽发电对汽轮机发电机组控制水平的提高,低温饱和蒸汽余热发电的控制系统也得到了发展。本文以唐山中厚板钢铁公司的低温余热饱和蒸汽发电工艺为分析对象,对其汽轮机控制系统及控制方案进行分析。汽轮机控制系统采用505E控制系统,串级PID调节方式,系统中常常包括时滞、惯性、干扰、死区和饱和等非线性环节[1]。为了进一步提高汽机的控制品质,本文采用模糊控制和PID相结合的模糊PID控制方案,使系统具有更好的快速响应特性和更强的适应能力,对改进汽轮机控制策略、进一步提高汽轮机控制水平具有一定的参考价值。
1 汽轮发电机调节系统的数学模型
汽轮发电机调节系统的被控对象主要分为5部分:电液转换器、油动机、进汽容积、汽缸及再热器、转子。本文主要采用机理分析法对被控对象各主要环节进行数学建模[2-4],其各部分传递函数如下:
(1)电液转换器的传递函数为:

其中:Te为电液转换器的时间常数。
(2)油动机的传递函数为:

其中:Ts为油动机的时间常数。
(3)汽轮机喷嘴室的气体容积方程传递函数为:

其中:T0为进汽容积时间常数。
(4)中间再热器容积方程为:

其中:α1为高压缸所占的功率比;Tp为再热器容积时间常数;Xp1(s)为喷嘴室中压力相对变化量。
(5)汽轮机发电机转子的运动方程传递函数为:

其中:Tα为转子的飞升时间常数;β为自平衡系数。
基于现有串级PID控制方案,在Simulink中建立被控对象传递函数的框图[5],如图1所示。
图1中,Pt、P、V、n、Pl、L 分别为功率给定、汽压扰动、阀门扰动、转速给定值、调节级压力扰动和负荷扰动;PID1、PID2、PID3分别为转速控制器、功率控制器和调节级压力控制器。根据汽机参数可知,Te=0.03,Ts=0.15,T0=0.2,Tp=4,α1=1/3,Tα=8,β=1。
2 模糊PID控制
2.1 模糊控制PID控制器
本文主要是对汽轮发电机组并网运行时的转速、负荷控制进行研究。负荷控制主要是控制汽轮发电机组实际发出功率的增减,目前控制系统中功率控制的方案采用串级PID控制方案,其中功率控制器为主调节器,调节级压力控制器为副调节器。由于功率给定信号、转速控制信号和负荷扰动信号均在功率控制器处汇合,从而使叠加之后的总输入信号变得更加复杂,对处理该复杂信号的控制器提出了较高的要求。因此,考虑对功率控制器作改进,使其具有更加灵活和适应性更强的控制功能,在此采用模糊自适应PID控制器[6],如图2所示。

图1 汽轮发电机串级PID调节系统框图

图2 模糊PID控制器
本文中的模糊控制器为3个双输入、单输出结构模糊控制器的组合,两个输入分别为功率偏差信号和功率偏差信号的微分,输出分别为ΔKP、ΔKI、ΔKD,为控制参数,根据得到的常规PID阶跃响应曲线,结合控制过程的特点对参数KP、KI、KD重新制定了调整原则,将输入与输出均设为7个模糊集,即模糊子集e,ec,ΔKP,ΔKD,ΔKI={NB,NM,NS,ZO,PS,PM,PB},并由此建立了输出3个参数的控制规则,将其编写在一个模糊控制器内,从而可计算出不同的偏差和偏差变化下控制参数调整量的模糊输出值,然后再进行解模糊,得到了KP、KI、KD三个控制参数。
2.2 模糊PID控制模型建立
取误差e的基本论域为[-0.6,0.6],为了提高系统灵敏度,将误差扩大10倍,即为[-6,6];ec的基本论域为[-0.5,0.5],设量化论域均为[-6,6]。本文通过MATLAB的模糊逻辑工具,在模糊推理系统编辑器中建立了2个输入(E、EC)和3个输出(ΔKP、ΔKI、ΔKD)[7],模糊决策采用 Mamdani型算法,解模糊采用重心法,PID控制的初始值KP0、KI0、KD0分别设为1、0.1、0。根据上述条件,针对被控对象在Simulink中建立模糊PID模型,如图3所示。

图3 模糊PID模型
3 自适应模糊PID控制模型
改进后的功率控制器相对于原PID功率控制器的差别在于可以完成PID参数的在线整定,对现场控制效果具有更好的适应性[8]。因此,对于控制器PID1和PID3,其参数设置与上一节所整定的结果相同:PID1的 KP1、KI1、KD1分别为20、0、0;PID3的 KP3、KI3、KD3分别为5、1、0。控制系统中只需整定模糊PID控制器中的参数。最后建立的汽轮发电机模糊PID调节系统模型如图4所示。
根据文献[9]可知,负荷扰动试验(即功率给定值阶跃扰动试验)时,是以 MCR(最大连续工况时的功率)15%阶跃量增加或减少机组目标负荷的,并且设置负荷变化的速率为3%(MCR)/min。而转速给定、阀门扰动量、汽压扰动量、调节级压力扰动量和负荷扰动量的数据均来自于现场某一时间段内的波动而采集的数据,即受到的阶跃扰动分别为10%、5%、30%、15%、10%。即模型中 Pt、n、V、P、Pl、L 分别设置为0.03、0.1、0.05、0.3、0.15、0.1,限幅器设定参数为±0.15。将图1和图4所示模型在Simulink中进行仿真对比,得出如图5所示结果。
由图5可以看出:当系统运行时,在各种干扰量作用时,改进的控制系统的功率输出和转速输出与系统相比波动较小,且能够较快地消除扰动影响使汽轮机运行达到稳态,从而可以减小电网波动;模糊PID系统的调节时间较小,振荡周期短。通过分析模糊PID与串级PID控制下得到的响应曲线的动态性能,发现其达到了较理想的控制效果,因此可充分证明本文建立的模糊PID控制模型能够更好的响应负荷运行时的实际工况,而且与传统的串级控制系统相比具有控制精度高、速度快、动态性能稳定等特点。
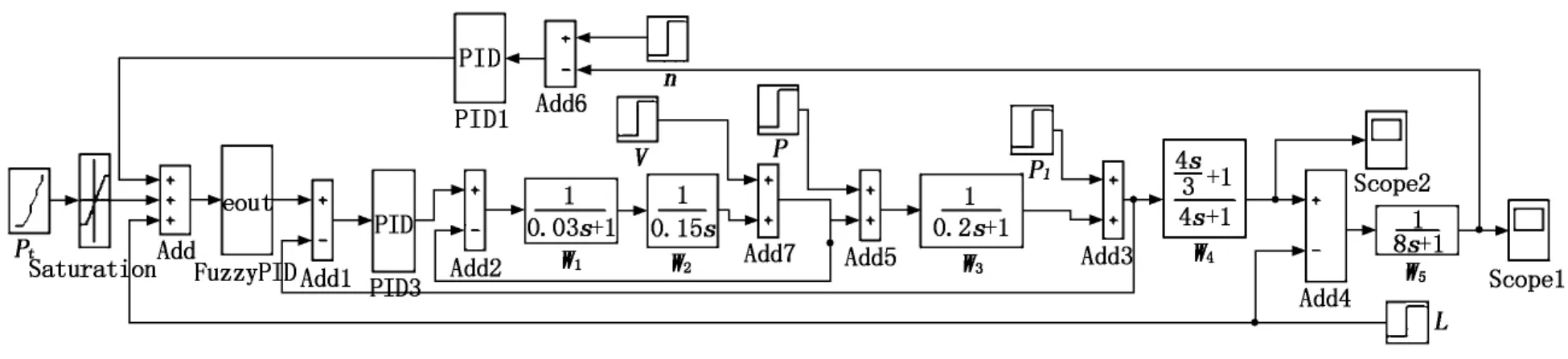
图4 汽轮发电机模糊PID调节系统模型
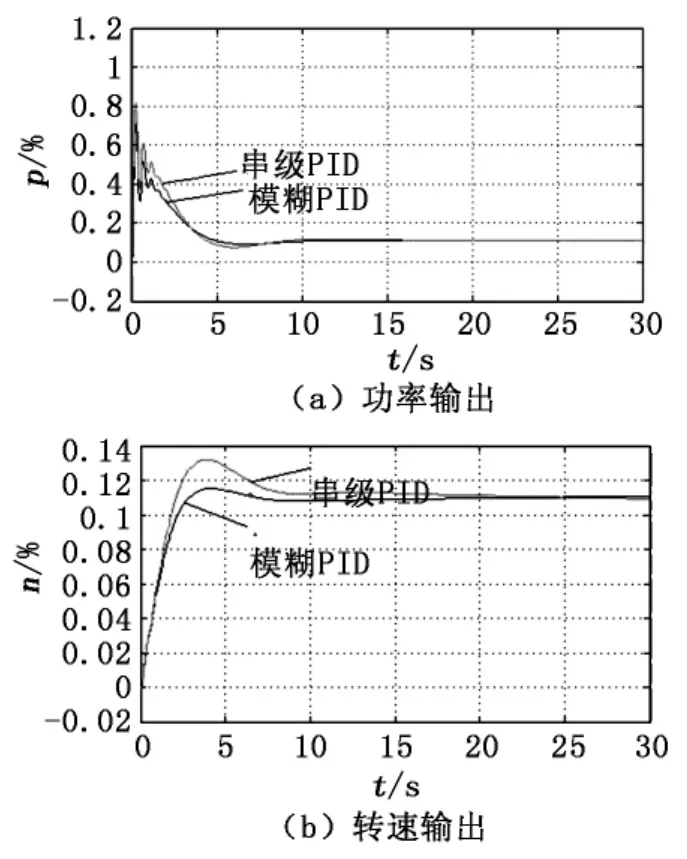
图5 两种方案仿真结果对比
4 结论
针对饱和蒸汽发电控制过程中的多变量、非线性、时变性以及串级PID存在的时滞性等特点,本文根据饱和蒸汽发电站工程现场采集的数据,在原有系统的基础上建立了基于模糊自适应PID的汽轮机发电控制模型,对功率PID模块进行改进设计。即利用模糊PID控制器作为功率控制器对汽轮发电机组并网运行时的转速、负荷进行有效控制,并利用MATLAB软件中的Simulink工具对控制系统进行了仿真。从仿真结果可以发现该系统具有较好的动态特性和鲁棒性,可达到满意的控制效果,满足实际生产所需要的工艺过程曲线和技术指标,因此将其应用于饱和蒸汽汽轮机发电系统的实际控制中是可行的。
[1] 王爽心,姜妍,李亚光.基于混合混沌优化策略的汽轮机调速系统模糊免疫PID控制[J].系统仿真学报,2006,26(11):70-74.
[2] 刘兴堂,吴晓燕.现代系统建模与仿真技术[M].西安:西北工业大学出版社,2001.
[3] 严俊峰.300 MW汽轮发电机组控制系统的仿真研究[D].湖南:长沙理工大学,2006:7-8.
[4] 谷俊杰,丁常富.汽轮机控制、监视和保护[M].北京:中国电力出版社,2002.
[5] 冯伟,高伟.基于 MATLAB的DEH系统仿真[J].华中科技大学学报,2001,29(5):60-61.
[6] 刘金琨.先进PID控制MATLAB仿真[M].北京:电子工业出版社,2004.
[7] 李博,龚晓宏.基于 MATLAB的模糊控制系统的优化设计与仿真[J].机械工程与自动化,2005(4):78-80.
[8] 张国良,曾静,柯熙政,等.糊糊控制及其 MATLAB应用[M].西安:西安交通大学出版社,2002.
[9] 浙江省电力试验研究所.DLT774-2004火力发电厂热工自动化系统检修运行维护规程[S].北京:中国电力出版社,2005:25-36.
