多波束检测技术在水下隐蔽工程中的应用
2013-04-29熊荣军孙杰孙爱国唐正涛
熊荣军 孙杰 孙爱国 唐正涛


摘 要:将多波束系统引入到水下隐蔽工程安全检测领域中,在对多波束系统工作原理进行论述的基础上,探讨了借助多波束系统进
行水下隐蔽工程检测的关键技术环节和解决方法;并依托某坝体工程,研究了多波束系统的具体工程检测效果。
关键词:水下隐蔽工程检测多波束
水下隐蔽工程的质量一直是水运工程检测行业关注的焦点,其检测工作中主要存在着地质复杂,水流紊乱以及检测范围狭小等难题。作为常规检测方法的水下探摸、侧扫声纳、水下机器人等均存在测试范围狭小、精度低、速度慢等缺陷,影响了水下检测的质量。因此,有必要引进一种新的技术,提高水下隐蔽工程的检测效果。
多波束检测技术采用了广角度和多信道定向接收技术,能够精确快速测出沿航线一定宽度范围内水下目标的大小、形状和高低变化,从而比较可靠地描绘出水下物体的精细特征。因此研究如何把多波束系统应用于水下隐蔽工程检测具有十分重要的意义。
多波束系统
多波束系统的工作原理主要是利用水下声纳模块发射和接受脉冲声波。多波束系统是由多个子系统组合而成的综合系统,多波束系统大体上可分为多波束声学系统、多波束数据采集系统、数据处理系统、外围辅助传感器和成果输出系统五个部分。
工程实例应用
某混凝土面板堆石坝于2007年建成后,坝体一直在沉降,个别面板处渗流比较大,因此需检查面板是否存在空洞和不均匀沉降。但是由于地质条件复杂,检测的手段有限。因此考虑尝试利用多波束系统对面板水下部分进行检测,以判断面板是否存在不均匀沉降变形。
本次检测采用丹麦Reson公司SeaBat7125多波束系统。
1、测区布置
主要从横向和纵向全方位对主板面板进行大范围的立体扫测。主坝面板检测主要集中在面板周围30m,该区域即为测线布置区域。
2、多波束系统调试
多波束系统调试最主要是进行船体坐标系统的建立、设备安装和校准,该环节的工作质量将直接影响最终的检测精度。
在仪器安装定位后,进行船体坐标系的建立,以确定水底测点的空间关系,实现多波束的空间位置转化。并建立一个当地坐标系,实现水深数据到大地坐标系的转换。
坐标系建立后,分别量取GPS天线、罗经、声纳探头相对于参考点的位置,往返各量一次,取其中值。
船体坐标系建立完成后,还需对Seabat7125多波束系统进行安装校准,即测定声纳测头、罗经和运动传感器的安装偏差(roll,pitch,yaw)。
3、多波束原始数据的采集和选取
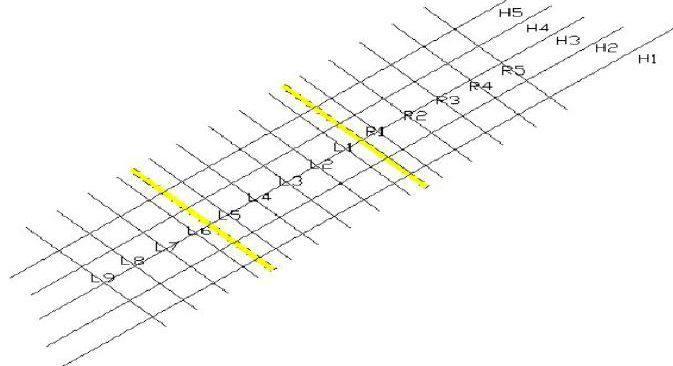
根据主坝面板特点,对面板进行区域划分。将整个面板沿坝体长度方向划分纵断面,并以某确定断面为起点,右边面板依次标记为R1~R5,左边面板依次标记为L1~L9;将整个坝面沿与坝体垂直方向划分横断面,于基准高程为10m、20m、30m、40m、50m处依次标记为H1~H5(见图1)。
图1某大坝主面板分块标记示意图
本次检测共采集到3345个侧扫剖面的原始数据,每个剖面均包含某处面板由江侧至坝侧的256个数据。选择具有代表性的第2015侧扫剖面数据进行分析,其中每个侧扫剖面含有256个数据,获得侧扫剖面数据的水深与波束序号的关系如图2所示。
图2侧扫剖面深度与波束关系图
图2反映了水深和波束序号的关系,从图中可以看出测船是沿着大坝面板斜面在航行,曲线的形状表示的是大坝面板形状,从测船发射的波束扫描范围为水下6m到1m左右。
4、数据的声速改正
利用多波束系统测得的声速数据对原始数据进行改正。根据声速跟踪法进行声速改正,既可得出相应的声速改正曲线图。其声速改正图如图3所示。
图3剖面声速改正后对比图
从图3可以看出,声速改正后的数据比原始数据略微要小一点,而且这个特点在深度越深的地方越明显,由此可以得知,随着水深的增加,原始数据会出现偏差。
5、数据的涌浪改正
涌浪改正主要是修正涌浪对多波束系统的影响。涌浪改正选用GPS验潮的线性内插值法,进行涌浪数据插值,然后对各水深值进行涌浪改正。
将声速改正后的数据进行涌浪改正,涌浪改正后剖面与深度关系图如图4所示。
图4剖面涌浪改正后对比图
由图4可知,经过涌浪改正和声速改正后的剖面深度数据与原始数据相差不大。
图5中两两曲线之间的空隙即为声速和波浪对多波束系统检测时造成的影响。由图可知,声速的改变和涌浪的误差较小。
图5剖面深度波束关系图
蓝色表示原始数据波束曲线
红色表示声速改正后波束曲线
绿色代表涌浪改正后的波束曲线
6、断面结果分析
将采集到的数据,全部通过声速改正和涌浪改正之后,各水深数据将不再与时间有关而是与坐标系相关,并且将船坐标系统转化到了大地坐标系,然后再进行多波束探头的横摇、侧摇以及纵摇的修正,就可以得出断面图(见图6)。通过深度和高程坐标的关系可以得出14个检测断面的斜率,根据斜率情况,既可判断大坝的面板是否发生了变形和沉降。
图6 断面深度距离关系图
由14个断面的断面图可直接得出每一块面板的高程与水深深度关系。根据高程与水深深度关系可直接计算出14个断面的斜率,结果见表1所示。
表1 断面斜率结果
由于该面板的设计斜率为1:1.4,由表3可知,坝体面板测试区域内的14个断面的斜率与设计斜率基本一致。
7、三维图像分析
为更直观反映检测结果,可利用检测数据直接生成三维成像图,如图7所示。
图7 某大坝三维投影平面图
该图反映了该坝上游面板及水下地形情况,从图7中可以看出,面板测试范围内(L9断面到R5断面)均未出现大的变形及空洞现象,面板深度方向变化均匀,未见不均匀沉降现象。因此可判定该坝面板表面并未发生变形、沉降及空洞,满足设计及使用要求。
结论
通过多波束检测,可精确得出各类水下物体的深度坐标,进而得出物体尺寸、形状、高度等参数,并能形成高精度三维图像,从而具备对水下隐蔽工程的质量检测功能,并具备以下优点:①以带状方式检测,覆盖范围大,精度高;②可进行环境影响因素修正,使外界不利因素对检测结果的影响降到最低;③可绘制成直观的断面图和三维立体图。 (作者单位:长江航道规划设计研究院)
