基于PLC控制的船用锅炉水位控制系统的分析
2013-04-29王瑞云
王瑞云
基于PLC控制的船用锅炉水位控制系统的分析
王瑞云
(渤海船舶职业学院,辽宁省葫芦岛 125005)
为保证船用锅炉在正常水位下工作,保证锅炉的给水量与蒸发量相当,以适应锅炉负荷的变化,对锅炉采取双水位自动控制,控制给水泵的启、停和给水阀的开度,使锅炉水位在水泵启停水位之间变化。并且当水位到达高水位和低水位以及过低水位时,通过PLC控制系统发出相应的报警指示,甚至停炉检修。
船用锅炉 水位控制 PLC
0 引言
船用锅炉水位自动控制系统的目的是保证锅炉在正常水位下工作,控制给水泵的启、停和给水阀的开度,从而控制给水量,使锅炉的给水量与蒸发量相当,以适应锅炉负荷的变化。在蒸发量较小,蒸汽压力较低的锅炉中,大多数采取双水位控制,即当锅炉水位达到水位下限时,自动启动给水泵,向锅炉供水。当水位达到上限时,自动停止给水泵的工作,锅炉工作水位在一定范围内波动。在大型油轮中,锅炉的蒸发量一般很大,蒸汽量较高,要求水位稳定在某一定值上,所以控制给水一般通过改变调节阀的开度来实现,即根据水位偏差信号来控制给水调节阀的开度,从而使给水量适应蒸发量。
1 船用锅炉水位自动控制系统
1.1 水位控制器
水位控制器是锅炉水位控制中心元件,水位控制器A10选用五点式控制器,对应5个水位,是锅炉水位控制中心元件,其结构如图1(a)所示,控制器与锅炉炉体相同,形成一连通器,控制器检测到的水位反应炉体内水位。具体接线如图3所示,输入端E1、E2、E3、E4,分别接受锅炉高水位、低水位、水泵启动/停止的电平信号,同时水位控制器根据所输入的信号做出判断,将与之对应的继电器接通来实现锅炉水位的自动控制。图1(b)图为A4、A5低低水位报警控制器的结构图。
1.2 水位自动控制转换开关
在图3中,转换开关SA为控制地点选择开关,当SA选择就地控制时,SA的触点13-14闭合,21-22断开,按下SB1或SB2,启动1#水泵或2#水泵,并且相应的运行指示灯亮;当SA选择遥控时,SA的触点13-14断开,21-22闭合,为水泵遥控电路提供通路。
转换开关SA3为控制方式选择开关,如选择手动控制时,SA3的触点1-2、7-8闭合,水泵启动和停止由操作人员通过改变SA3的手柄位置来控制;如选择自动控制时,SA3的触点5-6、11-12闭合,水泵启动和停止由水泵启停继电器KA33的触点的闭合与断开来控制。
转换开关SA4为水泵选择控制开关,1#和2#水泵互为备用,如选择1#水泵为主用供水泵,2#水泵为备用水泵时,SA4的触点1-2、5-6闭合;如选择2#水泵为主用供水泵,1#水泵为备用水泵时,SA4的触点3-4、7-8闭合。
1.3 船用锅炉水泵控制电路的主电路
图2为锅炉电力拖动系统主电路的接线图,合上电源总开关QS,再合上1#、2#水泵控制开关QF3和QF4,当接触器KM3得电时,1#水泵启动;当接触器KM4得电时,2#水泵启动。电路中还有热继电器K3和K4对水泵起过载保护用。

1.4 船用锅炉水泵控制电路
SA选择遥控,SA的触点21-22闭合;SA3选择自动控制时,SA3的触点5-6闭合;SA4选择1#水泵为主用供水泵,2#水泵为备用水泵,SA4的触点1-2、5-6闭合。
(1)当锅炉处于低水位时,则低水位继电器KA26得电,KA26的常开触点闭合,备用给水泵控制继电器KA30得电,KA30的常开触点闭合,接通备用给水泵2#水泵电路,启动备用泵2#水泵供水。同时KA26的另一常开触点闭合,并将信号接至PLC控制器输入端,输出低水位灯光(HL13)报警。
(2)当锅炉水位上升到水泵停止水位时,水泵启停继电器KA33失电,KA33的常开触点断开,切断给水泵电路,水泵停止供水。
(3)当水位上升到水泵停止位时,由于某种故障原因(如KA33的触点发生熔焊,不能及时分断),水泵继续供水,当水位上升到高水位时,则高水位继电器KA22得电,KA22的常闭触点断开,切断给水泵电路,水泵停止供水。同时KA22的另一常开触点闭合,并将信号接至PLC控制器输入端,输出高水位灯光(HL12)报警。
(4)当锅炉水位下降到水泵启动水位时,水泵启停继电器KA33得电,KA33的常开触点闭合,接通1#给水泵电路,水泵启动供水。
(5)当水位下降到水泵启动位时,由于某种故障原因(如KA33的触点不能及时闭合),水泵没启动,当水位下降到低水位时,则重复(1)的过程。
(6)过低水位报警电路:锅炉水位自动控制系统有两个过低水位控制器A4和A5,过低水位控制器根据水位检测传感器输出信号来控制过低水位继电器KA23、KA24的导通还是断开。当两个水位检测传感器同时发出过低水位信号时,则KA23、KA24同时导通,过低水位延时继电器KT5的常闭触点延时闭合,过低水位继电器KA25得电,KA25有三个触点动作:KA25的常闭触点断开,切断风机及燃油阀电路,使锅炉停炉;KA25的常开触点闭合,并输送至PLC控制器输入端,PLC控制器输出端指示灯亮,发出过低水位灯光(HL30)报警信号;KA25的第三个触点7-11闭合,过低水位指示灯HL31(在报警板处)得电,指示灯亮,发出过低水位灯光报警。
(7)锅炉给水压力低报警
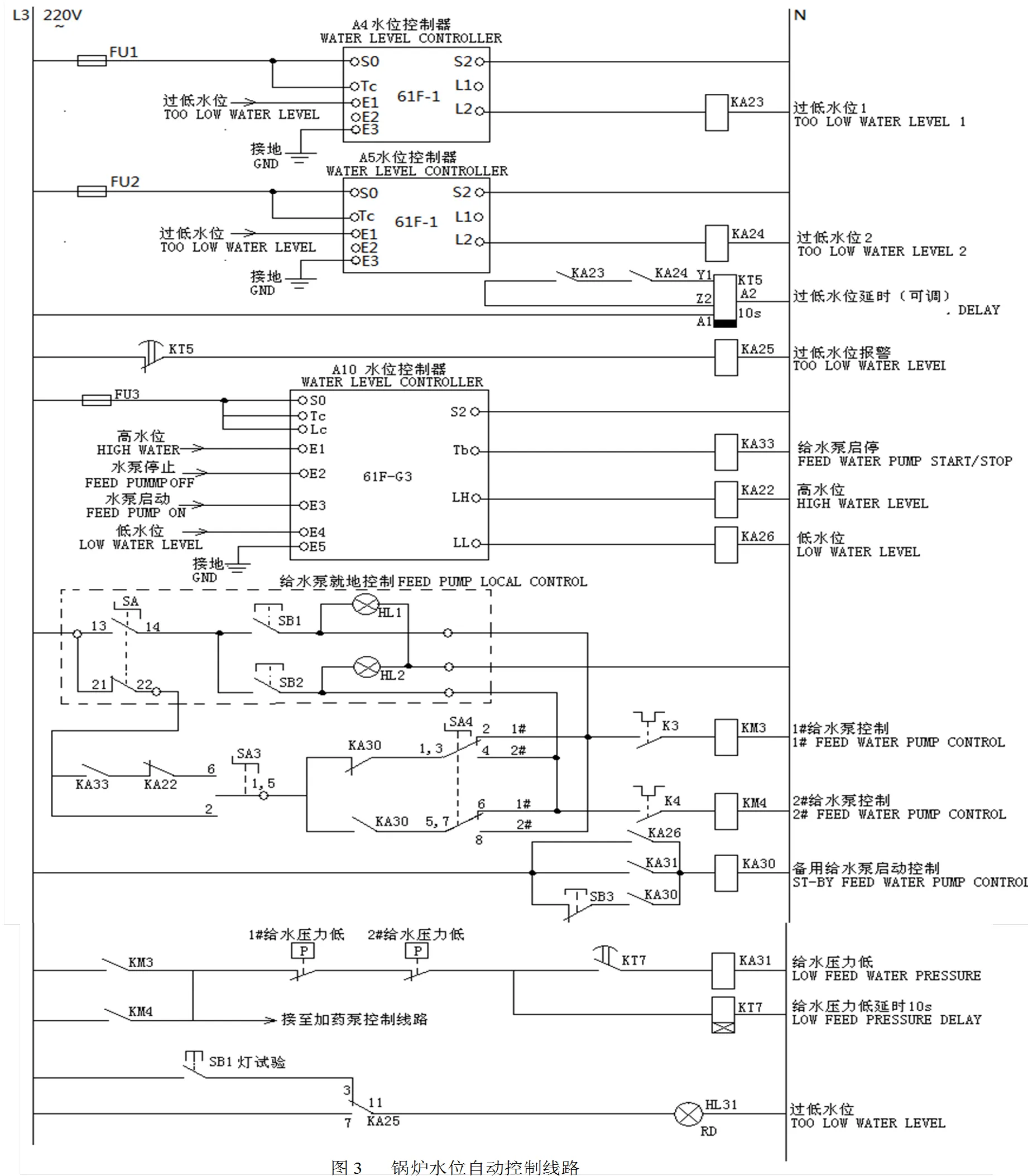
如图3所示,当锅炉工作时,给水压力低时间继电器KT7得电,KT7的触点延时闭合(确认确实是水压低),则给水压力低继电器KA31得电,KA31的常开触点闭合,备用给水泵控制继电器KA30得电,KA30的常开触点闭合,接通备用给水泵2#水泵电路,启动备用泵2#水泵供水。同时KA31的另一常开触点闭合,并将信号接至PLC控制器输入端,输出低水位灯光(HL14)报警。
(8)锅炉水盐度高报警
如图4所示,锅炉水盐度由盐度计A7来检测水中盐物质浓度,当水盐度高时,A7输出高电位,使盐度高继电器KA4得电,KA4的常开触点闭合,并将信号输送至PLC控制器输入端,PLC控制器输出端指示灯(HL32)亮,发出盐度高灯光报警。
(9)锅炉水油分高报警
锅炉油分由油分计A16来检测水中油份浓度,当水油分高时,A16输出高电位,使油分高继电器KA32得电,KA32的常开触点闭合,并将信号输送至PLC控制器输入端,PLC控制器输出端指示灯(HL33)亮,发出油分高灯光报警。
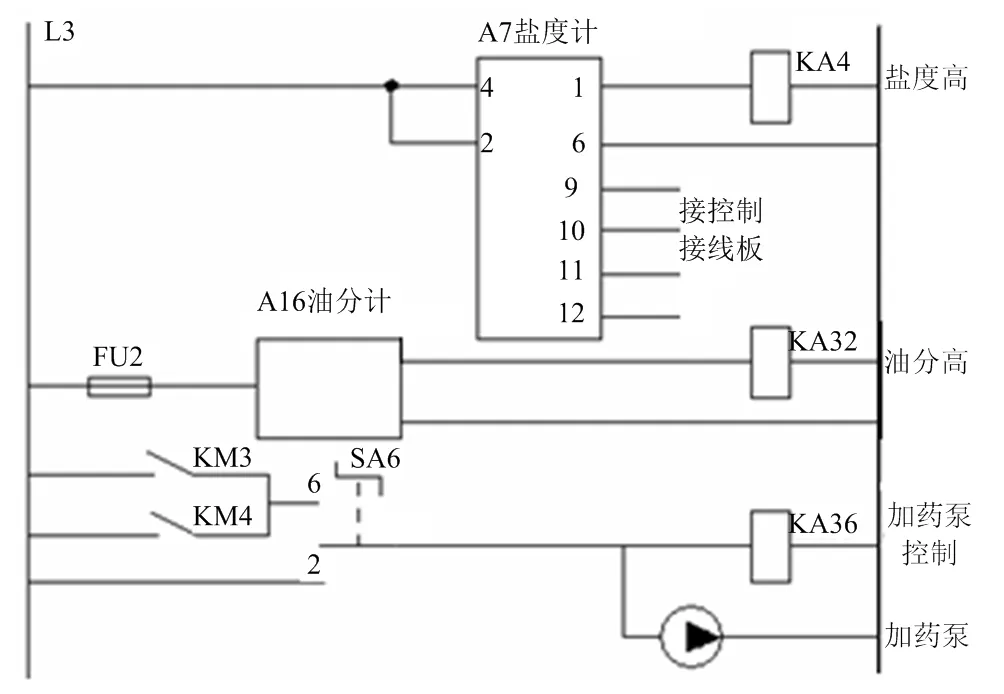
图4 锅炉水质监测电路的接线图
(10)锅炉水加药泵控制
锅炉水需要加药锅时,可开启加药泵。锅炉水加药泵的运行有手动和自动两种控制方式:若选择手动控制,将锅炉水加药控制转换开关SA6转换到手动控制位置,SA6的触点1-2闭合,加药泵启动向水中加药;若选择自动控制,将锅炉水加药控制转换开关SA6转换到自动控制位置,SA6的触点5-6闭合,并且启动1#或2#给水泵,水泵启动接触器KM3或KM4的常开触点闭合,加药泵启动向水中加药。同时,不论手动控制还是自动控制方式,加药泵启动运行的同时,加药泵继电器KA36得电,KA36的常开触点闭合,并将信号输送至PLC控制器输入端,PLC控制器输出端加药泵运行指示灯(HL34)亮,发出加药泵运行灯光指示。
若需停止加药泵,将SA6扳至停止位置,加药泵失电停止运行,继电器KA36失电,KA36的常开触点断开,加药泵运行指示灯不亮。
3 船用锅炉的PLC控制系统的硬件配置
船用锅炉的PLC控制系统的硬件配置是根据控制要求考虑PLC系统的硬件设计,硬件设计的主要内容是分析系统所需的输入输出信息,确定PLC输入输出接点的类型、数量和PLC的配置,绘出系统的PLC输入输出接点的配置图。考虑到船用锅炉自动点火控制、船用锅炉负荷控制、船用锅炉水位控制等控制,船用锅炉的PLC控制系统的输入输出接点庞大,而为了满足水位控制要求的PLC硬件配置,若采用西门子系列PLC,系统输入/输出接点配置如图5所示。
根据输入输出接点配置的设定,按控制要求及其所确定的逻辑条件,画出梯形图,编写PLC程序,便可完成船用锅炉水位的PLC控制。
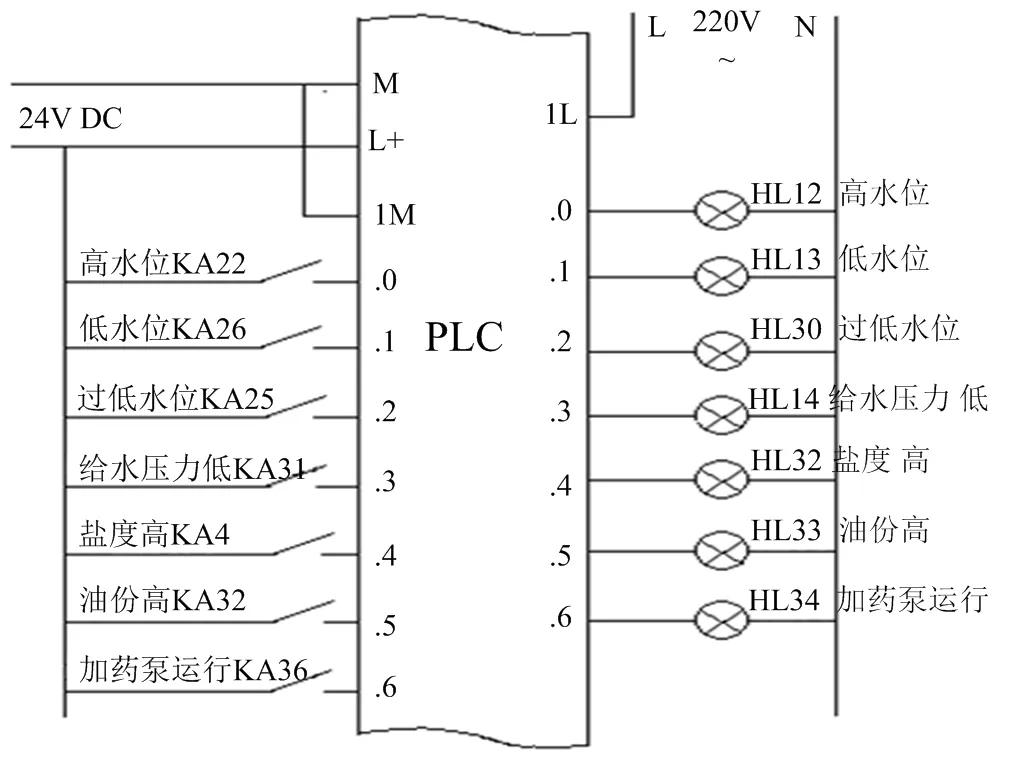
图5 船用锅炉PLC水位控制系统的的I/O接点配置图
4 结论
可编程控制器是一种数字运算操作的电子系统,专为在工业环境下应用而设计。可编程控制器及其有关设备,都应按易于工业控制系统形成一个整体、易于扩充其功能的原则设计。船用锅炉水位的控制采用PLC的控制系统克服了继电器-接触器控制可靠性、直观性、自动化程度不高的特点,结合触摸屏智能操作及显示技术,造就了PLC控制系统的抗干扰强、功能强大、精确度高等优点。
它不但具有与外部工业设备连接的输入/输出(I/O)接口电路,而且具有编程直观简单,易学易懂的优点,其输入模块可以直接接收现场设备的各种传感器信号,输出模块可以直接驱动2~5 A的受控设备, 产品系列化、结构模块化的可编程控制器给控制系统的配置和备件管理带来了极大的方便,这一点尤其适用于船舶机械设备的控制。
对于机舱温度高、湿度大、机械振动强的特殊工作环境,采用可编程控制器实现的锅炉水位的自动控制,提高了控制系统的可靠性和集中报警控制管理。
[1] 刘明伟. 船舶电力拖动. 北京: 人民交通出版社, 2010.
[2] 任志锦. 电机与电气控制. 北京: 机械工业出版社, 2002.
[3] 费千.船舶辅机. 大连: 大连海事大学出版社, 2009.
[4] 邓志良, 刘维亭. 电气控制技术与PLC. 南京: 东南大学出版社, 2002年.
Analysis of Water Level Control for Marine Boiler Based on PLC
Wang Ruiyun
(Bohai Shipbuilding Vocational College, Huludao125005, Liaoning, China)
U664.111 TP273.4
A
1003-4862(2013)04-0040-04
2012-09-17
王瑞云(1972年-),女,工程硕士,副教授。研究方向:船舶电气。