低磁钢舰艇消磁系统绕组安匝调整
2013-04-29刘胜道王巍肖存龙
刘胜道,王巍,肖存龙
低磁钢舰艇消磁系统绕组安匝调整
刘胜道1,王巍2,肖存龙1
(1. 海军工程大学电气工程学院,武汉 430033;2. 92557部队,广州 511400)
针对某低磁钢舰艇船体低磁、消磁系统绕组多区段设计及某消磁站行车测磁等特点,总结了低磁钢舰艇进行绕组安匝调整的一般步骤,分析了低磁钢舰艇绕组安匝调整中容易出现的问题并提出了解决措施。实船调整结果表明,利用所编制的安匝量计算软件能快速给出安匝调整方案,根据该方案进行调整能将结果磁场补偿到要求范围之内,从而节约了大量时间,并发挥了低磁钢舰艇磁性防护性能高的优点。
消磁系统 安匝调整 低磁钢舰艇
0 引言
低磁钢舰艇的特殊之处是使用低磁钢来建造船体和消磁系统绕组多区段设计,各区段匝数可单独进行调整,因而能更好地补偿舰艇感应磁场和剩余固定磁场,从而极大地提高其磁防护性能。消磁系统绕组的多区段设计减轻了消磁系统的重量、提高了消磁系统的可靠性和可维修性、适应了舰艇分段建造的要求[1]。但是,消磁绕组区段的增多使得绕组安匝调整相当困难,如果不借助计算机技术进行优化计算,仅凭人工经验几乎无法完成绕组调整工作。如果采用传统的最小二乘法[2]和遗传算法[3]以及微粒群算法来调整,也将是十分耗时的,尤其是初次调整时会需要十数天的时间。因此,在低磁钢舰艇设计建造的同时,已开发了专用的消磁绕组安匝调整软件,该软件利用最简便的二分搜索法来确定补偿安匝量,大幅度缩短了绕组调整时间,降低了绕组调整的劳动强度,很好地完成了低磁钢舰艇绕组安匝调整工作。
1 低磁钢舰艇消磁绕组敷设方式
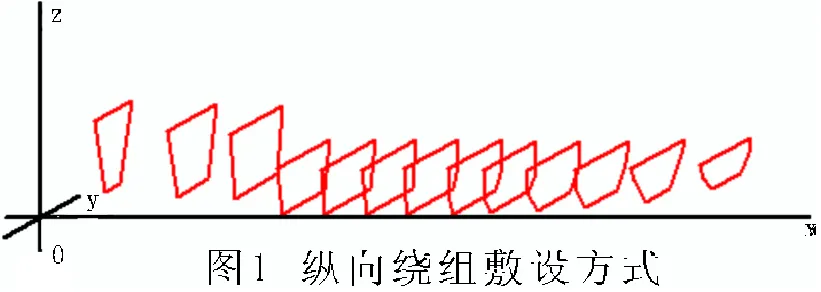
某低磁钢舰艇敷设有纵向绕组、横向绕组和水平绕组,其敷设方式分别如图1、图2和图3所示。
从图中可以看出,低磁钢舰艇的消磁绕组是分区段布置的。
2 某消磁站测磁方式
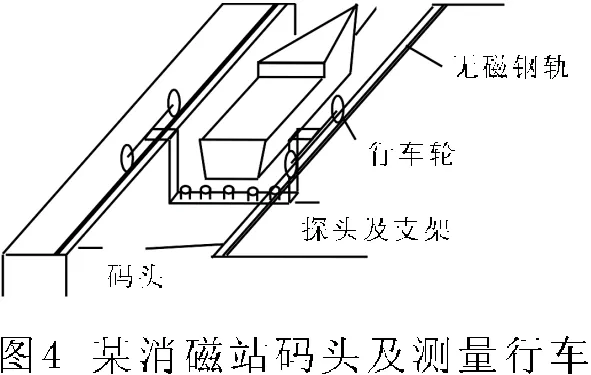
某消磁站的消磁码头是按磁东西方向建造的,如图4所示。码头上敷设无磁钢轨,无磁行车可在钢轨上前后移动,行车下有一个可以升降的探头架,探头架上放若干个水密探头。舰船消磁时从一端被拖进两码头之间用钢缆固定。测量磁场时行车从一端向另一端缓慢移动,每隔一定距离计算机对探头采样一次,当到达另一端后,采样结束,由数传设备将测到的数据传送给岸上的计算机。这种测量方式的测量点由探头间的距离和采样距离决定。测量深度用升降探头架的方法来调整。
对于某型低磁钢舰艇,采用了5个磁探头(分别放置在左舷下、左舷内、龙骨下、右舷内和右舷下)进行测量,行车每前进2 m测量1个点,共测量35个点。但是,行车测量只能在东西向进行,在需要南北航向的磁场时,只能在码头外用吊放磁探头的方式进行测量,两舷的测量点不在一条直线上,因此南北航向的磁场数据只有龙骨下可用。
3 消磁绕组补偿电流计算方法
3.1 目标函数选取
消磁系统消磁绕组补偿电流调整的目的就是调节各线圈的通电电流使得所有线圈产生磁场的总和在各个测量点上与舰艇磁场幅值相等、方向相反,刚好补偿舰艇磁场。采用的目标函数有均方根误差(RMS)最小和峰值误差(PM)最小等。本文选取均方根误差(RMS)最小为目标函数[7]。

上式中a为第区段补偿线圈在第个测量点的安匝效率。
3.2 约束条件
消磁绕组中所通过的电流受到消磁电源供电能力的限制,每路电流都存在一个最大值,即

3.3 目标函数求解
二分搜索法的基本思想是在搜索空间[a b]上选取中间点c,通过比较(a),(b),(c)的大小来决定删除左半区间[a c]还是右半区间[c b]。删除后的新区间是原区间长度的一半,再选取新区间的中间点,来与新区间的端点继续比较下去。重复这个过程,最后确定出极小值点。
在利用二分搜索法求解目标函数F()时采用多轮求解,逐步逼近的方式。初始条件下,各路补偿电流为零,第一轮求解时,将1作为变量,1,2,3带入初始值,利用二分搜索法在 [-1max,1max]空间求解(i)得出1的值,并覆盖初始值。接着将2作为变量,其余各路补偿电流带入初始值,在[-1max,1max] 空间求解(i)得出2的值,并覆盖初始值。经过第一轮求解后,各路补偿电流均有了一个不为零的初始值,此时开始第二轮求解,对第一轮求解的结果进行调整,向最优解逼近。依此进行多轮求解,直至满足消磁的技术要求,最后确定各路补偿电流的值。
4 绕组调整
4.1 绕组调整步骤
在某消磁站进行消磁绕组调整的步骤如下:
第一步:测量低磁钢舰艇4个航向的原始磁场;
其中南北航向的测量值只有龙骨下可利用,且龙骨下只测量了23点,而东西向的磁场值为35×5的点阵,因此在计算出龙骨下的Zix后,利用3次样条曲线将23个点插值到35个点,以便与东西向磁场对应。
第二步:将低磁钢舰艇停在东航向上,通过舰艇上的消磁电流调整器给绕组供电来测量各绕组的单位安匝效率;
第三步:将原始磁场、航向差和绕组安匝效率等参数输入程序中,计算出各绕组各区段的安匝量;
第四步:按计算出的安匝量进行绕组调整;
第五步:测量结果磁场,如结果磁场满足要求,则结束绕组调整工作。如结果磁场不满足要求,则将结果磁场输入程序进行再次调整,直到结果磁场满足要求。
对多条低磁钢舰艇的调整结果表明,利用所编制的绕组调整软件,一般一次调整就可满足要求,少量绕组需根据结果磁场值进行一次再次调整。
4.2 容易出现的问题
在该消磁站对多条低磁钢舰艇进行消磁系统绕组安匝调整中,发现以下问题容易产生并对调整结果产生影响:
1) 绕组区段效率测量误差
由于低磁钢舰艇消磁系统绕组区段数量非常多,每一区段都必须测量其效率,因此耗时很长。消磁站以前规定是当休息时间较长时,行车横梁必须收起,待测量时再重新放下。行车横梁收起放下会导致两次深度位置有差异,因此会产生测量误差。为了避免产生误差,规定在低磁钢舰艇磁场测量期间(包括绕组效率测量)消磁站的行车横梁不得收起。
2) 地磁背景的变化
地磁背景的变化会对消磁绕组安匝调整的效果产生影响,因此应尽量使用测量时间最近的地磁场值作为背景。
4.3 实船绕组调整
利用所开发的专用消磁绕组安匝调整软件对多条低磁钢舰艇进行了绕组调整,其中一条低磁钢舰艇实测得到的结果磁场如图5和图6所示,图中数据经过了归一化处理。实船绕组调整结果表明,低磁钢舰艇的消磁系统补偿取得了十分显著的效果,且调整速度快,调整精度高。

5 结论与建议
本文针对低磁钢舰艇船体低磁、消磁绕组多区段设计及某消磁站行车测量等特点,总结了低磁钢舰艇在某消磁站进行绕组调整的一般步骤,分析了多条低磁钢舰艇消磁系统绕组调整中出现的问题并提出了解决措施。实船调整结果表明,利用所编制的安匝量计算软件能快速给出安匝调整方案,根据该方案进行调整能将结果磁场补偿到要求范围之内,从而节约了大量时间,并发挥了低磁钢舰艇磁性防护性能高的优点。
对于以后在该站进行的低磁钢舰艇消磁绕组安匝调整工作,给出如下建议:整个磁场测量过程中,不要调整行车横梁的上下位置;尽量使用测量时间最近的地磁场值作为背景磁场。
[1] 唐申生,周耀忠,庄清华.大型舰船分区消磁理论研究[J].海军工程大学学报,2003,15(1):80-83.
[2] 朱文普,李琥.计算补偿舰船磁场的一种方法[J].舰船科学技术,1979,1(5): 70-72.
[3] TARR P B,POWELL N. Optimal degaussing using an evolution program[P].United States: US6546349,2003.
Calibration of a Degaussing System Coils’ Ampere-turns for Low Magnetic Steel Ship
Liu Shengdao1, Wang Wei2, Xiao Cunlong1
(1. Naval University of Engineering,Wuhan 430033,China;2. Unit No. 92557,Guangzhou 511400,China)
TM153.1
A
1003-4862(2013)04-0025-03
2012-07-18
刘胜道(1972-),男,博士,副教授。研究方向:舰艇磁隐身技术。