船用空压机监控系统的设计研究
2013-04-29林文城
林文城
船用空压机监控系统的设计研究
林文城
(厦门海洋职业技术学院,福建厦门 361012)
针对早期采用以继电器为主导的控制系统存在的问题,以某轮空压机系统为例,根据该轮高压空气系统的技术要求与空压机的运行特点,开发以西门子s7系列可编程控制器为核心的监控系统,实现了该空压机运行过程中的精确控制、节约耗能和提高可靠性等方面的要求。
船用空压机 PLC 自动控制
0 引言
在早期的船舶空压机控制系统运用过程中:明显存在以下问题:第一,自动控制系统大多选择以继电接触器为主,使用的继电器数量多且控制配电系统体积大、工作频率低、寿命短和可靠性差等,制约其进一步发展;第二,每艘船一般设有2—3台空压机向主空气提供高压空气瓶,为避免其中某台空压机长期大负荷工作,需要轮机员定期人工转换控制这些空压机,必然提高管理者的劳动强度和降低系统自动化程度。
PLC具有功能强大、稳定性好、抗干扰能力强和维护简便等特点,能轻易解决早期船舶空压机控制系统存在的问题,故在其系统设计和改造中大量采用了PLC取代继电器。在此提出了一种以西门子s7系列PLC为控制核心,配有MT500系列触摸屏来实现对早期船舶空压机监控系统进行改造,通过状态参数的数据采集和运算,实现执行元件的自动控制操作功能,保证整个空气系统在安全、稳定和节能的状况下长期运转。
1 空压机控制系统的硬件组成
下位机采用西门子PLC 224为中央控制器,各个压力传感器、温度传感器、供气电磁阀和电磁换向阀等与模拟量输入输出模块(1746—NI04 V )相连。上位机使用带串行通讯口的触摸屏(MT 510T),通过转换器与PLC连接,采用Easy Builder 500组态软件绘制人机界面,从而实现空压机运行的控制。
2 系统控制原理
2.1 某一船用空压机概况
某船舶空气压缩系统配备两台TANABE的H-63单缸级差活塞式空压机向主空气瓶供应高压气体,该空压机的一级缸直径为140 mm,活塞行程为80 mm,转速为1200 r/min,额定排压为3 MPa,理论排气量为5.91 m3/min。同时船舶还设有一台应急空压机,以便在电站停电时向辅气瓶供气,能供启动发电柴油机或起降救生艇等急用。
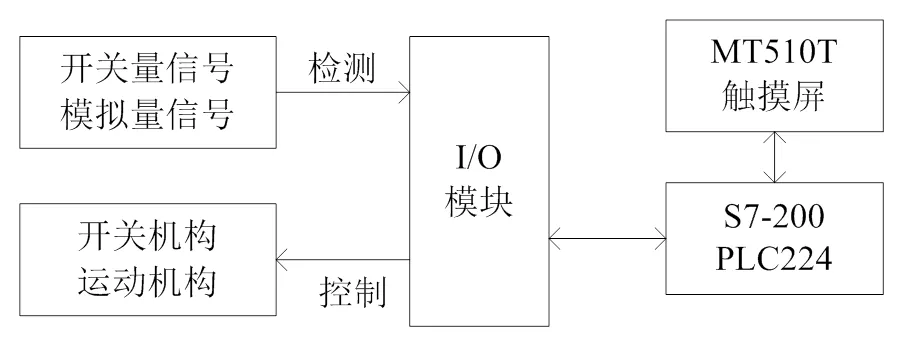
图1 空压机控制系统的硬件组成图
2.2 系统控制思路
根据采集的相关参数数值,经过PID计算。非正常工作时发出警报、保护性停车,分析系统故障产生的原因并提出排除措施;正常工作状态下自动调节使系统参数保持在设定范围内。
获取空气瓶中压力数值,启动或停止空压机的运转,来保证空气瓶中的压力在设定的范围内,是空气系统控制的核心。同时,需设定和测试每台空压机连续运行时间,让两台空压机在自动轮换工作,从而解决传统上采用人工更换压力继电器来实现空压机的主次切换。此外,还要考虑减小对电网的冲击,实现空压机的轻载启动或停车。
如图2和图3所示,PLC-224在应用程序的控制下,结合空气瓶压力和空压机持续运行时间的PID运算,获得相关技术参数值,再由PWM控制将其转化成时间比例脉冲输出量,进而改变空压机的工作台数以及需要对应投入运行的空压机,从而使空压机根据空气系统压力和各自运行时间的变化,及时选择自动起停,保证实现空气系统更为精确的自动控制和行之有效的节省能耗,同时实现系统长期安全可靠运行。
2.3 PLC硬件接线表(如表1所示)
3 系统软件设计与实现
采用编程软件对PLC程序进行设计与开发,主要围绕下位机PLC程序和上位机监控界面的设计来进行展开。
3.1 PLC控制程序的开发
根据船用空压机系统的特点和要求,在STEP7编程环境下,将程序分成若干个子程序模块,进行控制程序设计,使得程序逻辑清晰严密,并具有良好的可复制性和可扩展性。监控系统由主控制程序、数据采集、工艺流程和输出控制等4个模块组成。本文以控制空压机启动停车和主次切换为例,设计系统监控流程如图2和图3所示。
1)运行参数的数据采集
将PLC采集的模拟量数值依次放在VD1000开始的寄存器内。
表1 PLC硬件接线表
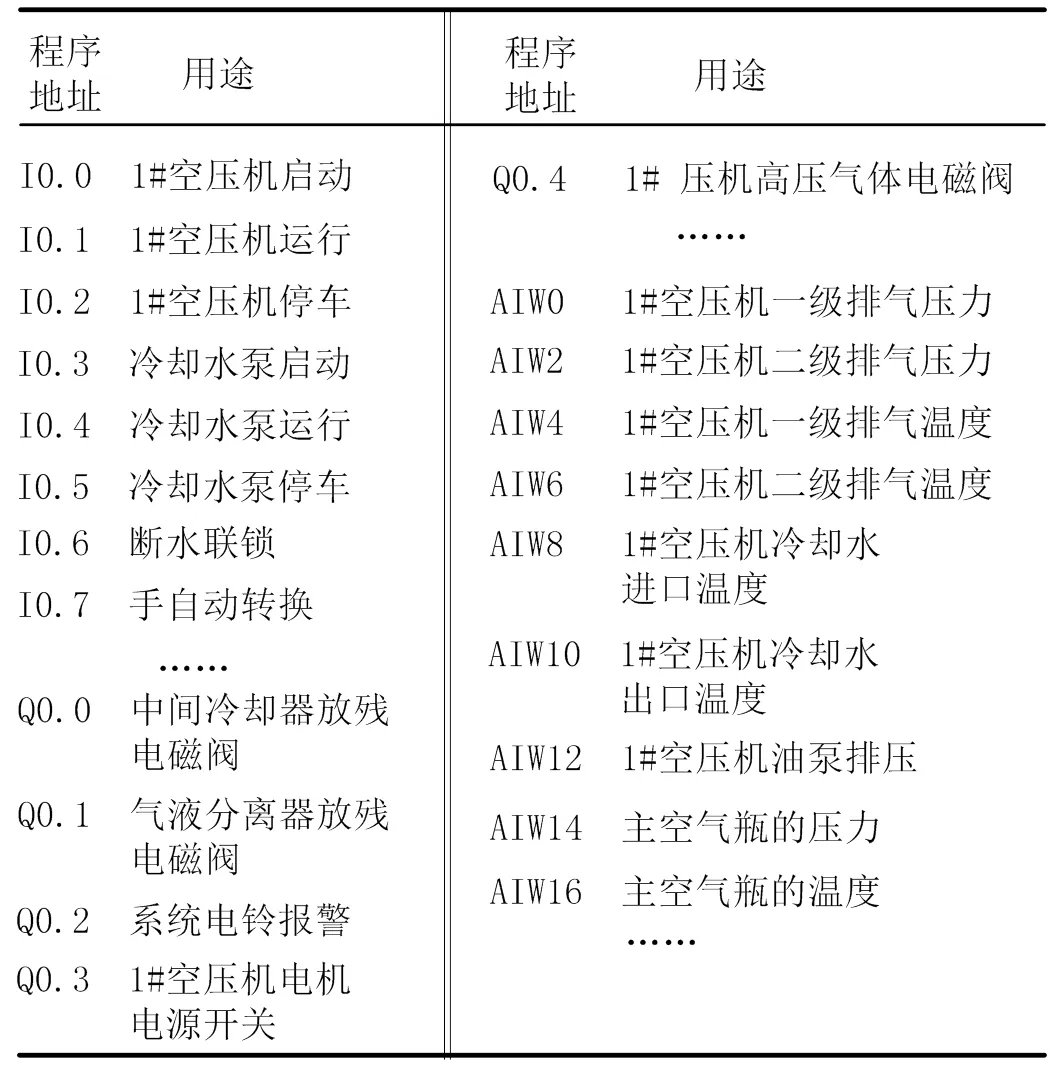
2)监控系统的保护和报警
空压机的报警和保护性停车主要表现在电机过载保护、过电流保护、冷却水水压保护、空压机排气温度保护和油泵排压保护等。
3)PID运算
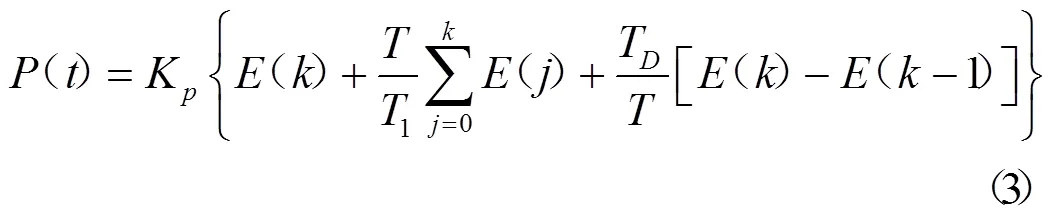
在PLC采集数据的运行参数中,大部分的参数属于测量参考量和安全报警量,如图2和图3所示,空气瓶中压力和主空压机持续运行的时间分别是闭环控制的最重要参数。以控制空气瓶中压力为例,该参数借助PID控制算法调节输出,以促使偏差倾向于零,使系统达到稳定状态。根据PLC周期采集参数数据的特点,控制系统选择离散化的周期采样偏差公式,用数字形式的差分方程代替连续系统的微分方程,则积分项和微分项可用求和及增量式表示:

把式(1)和式(2)代入PID算法的表达式

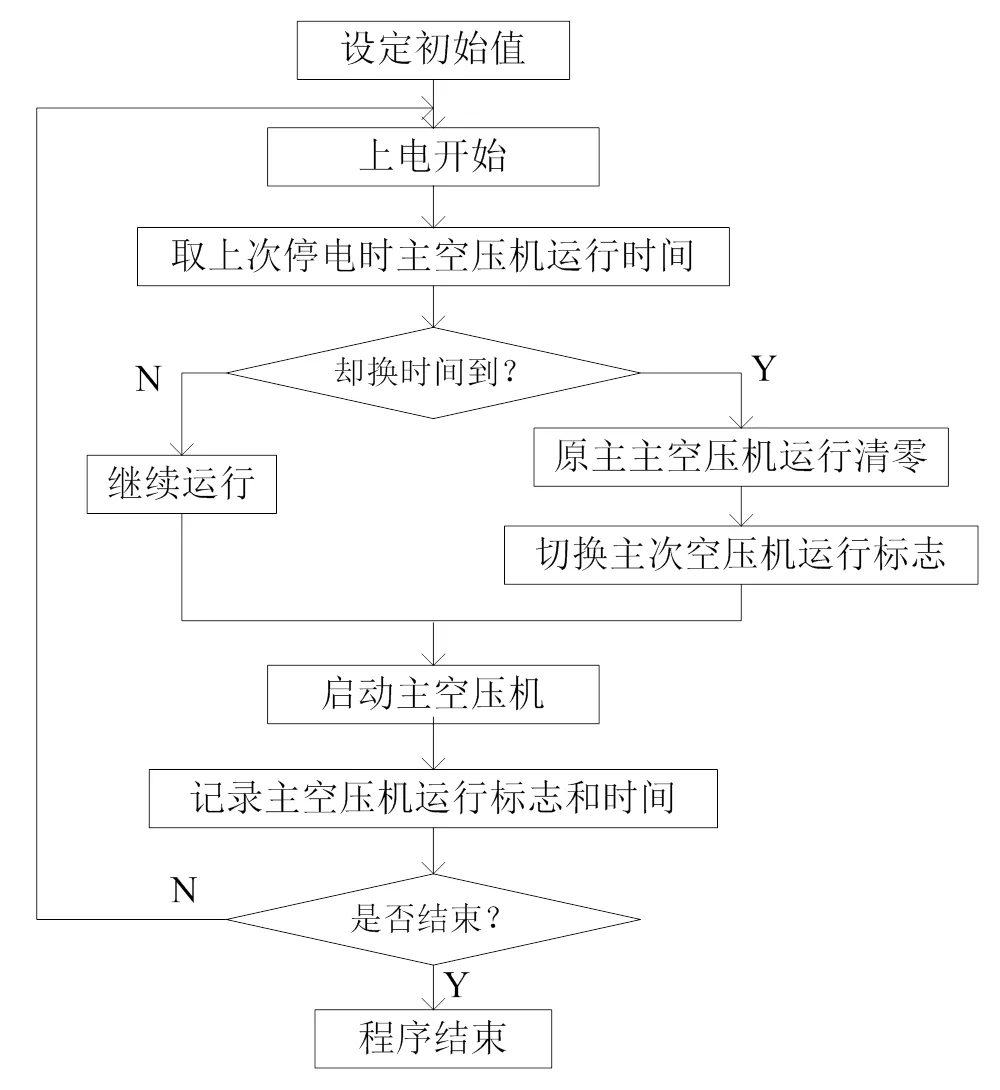
图3 空压机主次切换控制流程图
即推出离散的PID表达式:
4)PWM输出
在船用空压机监控系统中,根据对主空气瓶压力的PID计算结果,通过PWM输出,实现空压机的启动或停车,保证系统压力维持在设计的范围内。
3.2 人机界面
本例监控系统选择MT510T触摸屏,采用Easy Bluilder500组态软件完成编程,实现满足友好和直观性能的人机界面的建立。该界面可以动态显示空压机运行中压力、温度和电流等技术参数数值,同时不但实时反映压缩机和冷却水泵等动力设备的运行状态,而且显示各阀门和卸载机构等执行元件的动作情况。当故障发生时,该界面能及时保存异常数据并记录报警时间和内容,及时显示监控系统的分析判断。另一方面,该人机界面具有参数设定功能,轮机技术人员综合考虑系统控制的精确度和稳定性,调整设定数据间隔采集的时间以及系统运行的参数数值等。人机界面所能达到的智能化,直接影响到作为监控系统窗口的成功与否。
4 小结
本文采用以西门子s7系列PLC为控制核心,配有MT500系列触摸屏,完成对船用空压机运行监控系统的设计。该监控系统轻松地解决了传统继电器控制的结构复杂、稳定性差和自动化程度等缺点,充分发挥了PLC运算速度快、智能化高、抗干扰能力强和维护方便等控制优点。经过船舶两年时间的运转实践,据统计,该监控系统给整个空气系统节省的能量损耗达到6%,空压机的故障发生率减少32%左右,而且在一定程度上减轻轮机技术人员的管理成本,实现了设计的要求。
[1] 费千. 船舶辅机[M] . 大连: 大连海事大学出版社, 2005.
[2] 李向东. 电气控制与PLC[M]. 北京: 机械工业出版社, 2007.5
[3] 何勇. 空压机的控制系统问题分析[J]. 江苏船舶, 2011, (5): 27—28.
[4] 曾祥辉. PLC和变频器在空压机节能改造中的应用[J] . 中国新技术新产品, 2009, (5): 133.
[5] 刘卫华. 往复式压缩机故障分析及智能诊断系统[J]. 压缩机技术, 2000(4): 27—30.
Design of Marine Air Compressor Monitoring System
Lin Wencheng
(Xiamen Ocean Vocational College, Xiamen 361012, Fujian, China)
TP277
A
1003-4862(2013)04-0022-03
2012-08-30
林文城(1975-),男,副教授。研究方向:船舶辅机自动控制和维护管理。