基于SCOT加权广义互相关算法的船舶管系泄漏定位研究
2013-03-31韩雪峰刘跃冲彭中波
韩雪峰,刘跃冲,彭中波
(1.重庆交通大学航海学院,重庆400074;2.重庆交通大学交通运输学院,重庆400074)
时间延迟估计 (TED)是管道泄漏定位中的一项关键技术。通过估计泄漏信号到达两个传感器的时间延迟可以计算出泄漏点的位置。然而,在船舶工作环境中,由于存在背景噪声,严重影响了时间延迟估计的精度,降低了泄漏定位的准确性。为了克服背景噪声的影响,一个有效的方法就是采用SCOT加权广义互相关算法[1]。根据不同的背景环境,通过求两信号之间的互功率谱,并在频域内进行平滑相干加权,对信号和噪声进行白化处理,提高信噪比,锐化互相关函数峰值,再变换到时域得到两信号之间的互相关函数,最终估计出两信号之间的时延[2]。该算法具有较强的抗干扰能力,实用性好,还可以提高时间指示分辨率,抑制或减小噪声信号引起的估计误差。作者将采取SCOT加权广义互相关算法进行船舶泄漏定位研究。
1 船舶管系泄漏定位系统的工作原理
为了完成泄漏定位,泄漏点两端传感器的安装位置如图1所示。如果存在泄漏,信号x1(t)和x2(t)的互相关波形就会存在一个明显的峰值。时间延迟值τpeak即泄漏信号到达两个传感器的时差可以被测到。泄漏点距离传感器1的距离d1可以由时间延迟值τpeak、两测量点间的距离d和波速c三者之间的关系式计算得到[3]

其中:d可以在线测量,c一般用管道资料估算或者通过模拟泄漏在线测量。

图1 装有两个传感器的泄漏管道示意图
2 SCOT加权广义互相关算法分析
SCOT加权广义互相关算法在时域和频域的流程图,如图2(a)和(b)所示。

图2 SCOT加权广义互相关算法流程图
2.1 信号模型

其中:x1(t)和x2(t)为两个独立的传感器收到的信号,s1(t)和s2(t)为声源信号,n1(t)和n2(t)为互不相关的加性噪声信号。
2.2 SCOT加权广义互相关算法
SCOT 加 权 函 数[4]为其中是x1(t)和x2(t)的常规相干函数
如果x1(t)和x2(t)是平稳的连续随机信号,则SCOT加权广义互相关函数[5]为:

其中:τ是时间延迟量,⊗表示卷积,F-1表示逆傅里叶变换
Sx1x2(ω)为信号x1(t)和x2(t)的互功率谱密度(CSD)

其中:Sll(ω)是泄漏信号l(t)的自相关功率谱密度(ASD),H(ω,x)是频响函数

其中:β是信号管道壁厚损失量,An与管壁的属性和传感器的类型有关。下标n的取值为n=0、1和2,与每个压力的测量点一致,分别代表管壁的径向速度或径向加速度。
由于s1(t)和s2(t),n1(t)和n2(t)两两互不相关,所以式(4)可表示为:

2.3 SCOT加权广义互相关估算法的方差
SCOT加权广义互相关估算法的方差为[6]:

2.4 SCOT加权广义互相关估算法的分辨率
SCOT加权广义互相关估算法的分辨率为:

其中:ωc为中心频率,ωc=(ω0+ω1)/2,ω0为下限频率,ω1为上限频率。
3 实验验证
对实验设备 (如图3所示)测得的实验数据进行分析。在该实验设备上,将用水听器和加速表对泄漏信号进行联合测量。两测量点间的距离d=102.6 cm,d1=73.5 cm。两测量信号分别通过截止频率为200 Hz的抗混叠滤波器,然后对信号进行数字化处理。数字处理后,利用带通滤波器对测量信号进行滤波处理,水听器测量信号的滤波截止频率为10和50 Hz,加速表测量信号的滤波截止频率为30和140 Hz。

图3 模拟船舶管系泄漏检测实验系统平台图
利用1 024点FFT,采用Hanning窗函数和CSD求平均值对数字处理的数据进行频谱分析。利用式(4)对水听器和加速表的测量信号进行互相关运算,为了得到峰值的相关值,需对结果进行标准化处理,其互相关函数波形图分别如图4和5所示。在两种情况下,其互相关函数波形图峰值突出,方差很小。
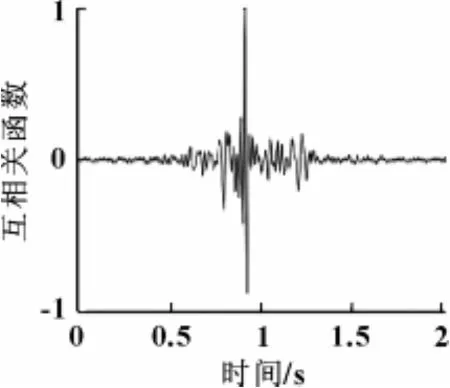
图4 水听器测量信号的标准互相关函数波形图
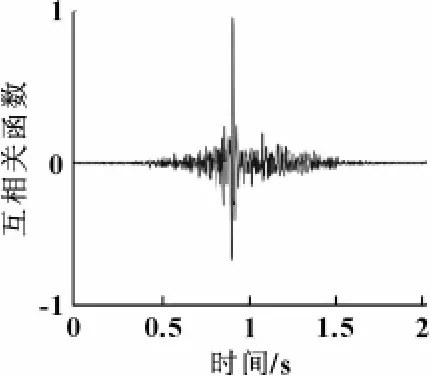
图5 加速表测量信号的标准互相关函数波形图
为了评估SCOT加权广义互相关算法的精确度,d1被计算出来。针对水听器的测量信号,分辨率为Δτ=0.017 s,计算得 d1=73.3 cm,相对误差为0.27%。针对加速表的测量信号,分辨率Δτ=0.006 s,计算得d1=73.6 cm,相对误差为0.14%。
利用式 (8)计算SCOT加权广义互相关算法的方差。水听器测量信号的标准偏差为-0.092,其标准偏差很小。加速表测量信号的标准偏差是-0.092,其标准偏差也很小。由于带通滤波器的存在,相对于SCOT加权广义互相关算法的分辨率,其标准偏差是无关紧要的,并且在今后的船舶管系泄漏定位的实际操作中可以将其忽略。
4 结束语
在船舶复杂的背景噪声中,船舶管系泄漏定位是船舶装备监控系统中的重点,也是实现的难点。通过广义加权互相关法,选择SCOT加权函数,可以有效地抑制背景噪声对泄漏信号的影响,突出互相关函数峰值,提高定位的准确性。通过实验验证,SCOT加权广义互相关算法可很好地用于船舶管系泄漏定位,表现出了相对较好的鲁棒性。
【1】KNAPP C H,CARTER G C.The Generalized Correlation Method for Estimation of Time Delay[J].IEEE Trans on ASSP,1976,24(4):320-327.
【2】何蒙,祖丽楠.基于LMS的广义互相关时延估计[J].语音技术,2010,34(9):46-48.
【3】张皓,刘纪元.基于广义互相关理论的风速测量算法研究[J].电子设计过程,2011,19(3):74-82.
【4】梁宇,马良.基于广义互相关算法的时延估计[J].计算机科学,2011,38(10A):454-456.
【5】GAO Y,BRENNAN M J,JOSEPH P F.A Comparison of Time Delay Estimators for the Detection of Leak Noise Signals in Plastic Water Distribution Pipes[J].Journal of Sound and Vibration,2006,292:552-570.
【6】戎晓政,刘加.声源定位中的时延估计方法研究[J].电声技术,2010,34(2):42-46.
【7】吴喜录,陈庆生,张元.目标定位时延估计的对比研究[J].现代引言,1996(4):7-10.
【8】铁勇,刘洋,李树华.广义相关时延估计方法在漏水检测定位中的应用[J].内蒙古大学学报:自然科学版,2007,38(2):216-219.
