全透明模型泵的设计及PIV流场测量
2013-03-30倪福生朱小伟
李 钊,倪福生,朱小伟,顾 磊
(1.河海大学机电工程学院,江苏 常州 213022;2.河海大学疏浚技术教育部工程研究中心,江苏 常州 213022)
0 引言
泥泵是挖泥船作业中的重要设备之一。由于泥泵内部固液两相流动的复杂性,人们对泥泵内部固体颗粒流动规律的认识存在差异,泥泵的设计一直以清水工况为主[1]。设计开发了一款能够全域观察内部流动情况的全透明泥泵,用于研究泥泵内部的流动规律。为了能够拍摄整个泥泵内部的图像,将泵的入口流道与驱动轴置于同一侧,满足了PIV全域测量的要求。
1 模型泵结构特点及水力特性
模型泵的泵轴穿过入口流道,为避免泵轴转动带动流体旋转而恶化入水流态,在泵轴上增加轴套,水流沿轴套外环形通道进入叶轮,模型泵的另一侧加工成便于成像的平面,其结构如图1所示。

图1 模型泵入口流道结构
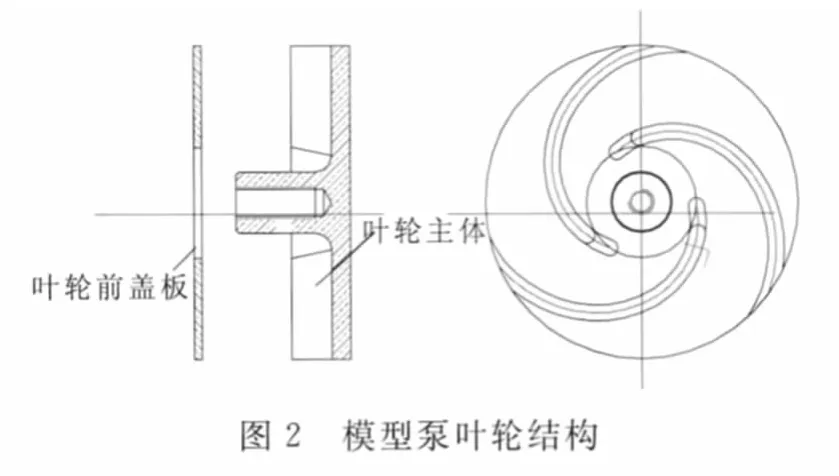
为提高强度,有机玻璃叶轮采用整体式结构,泵轴与叶轮之间用螺纹传递力矩,前盖板与叶轮主体通过胶粘连接,叶片形状为圆柱形,3片,如图2所示。综合流量、转矩等多个因素,确定模型泵尺寸:叶轮直径为200mm,叶轮宽度为25mm;由于有机玻璃的强度不高,泥泵的设计转速为1 000r/min。
设计的模型泥泵主要是为了满足PIV非接触测量要求,没有刻意追求水力性能。但作为固液两相流体研究的载体,希望所设计的泥泵具有良好的水力性能[2-3]。为考察该泵的水力性能,在不同转速下进行多次试验,得到了不同转速下泥泵的H-Q及η-Q性能曲线,如图3所示。由图3可以看出,泵的特性曲线光滑,变化趋势正确,在设计转速下效率约为60%。

2 PIV拍摄结果分析
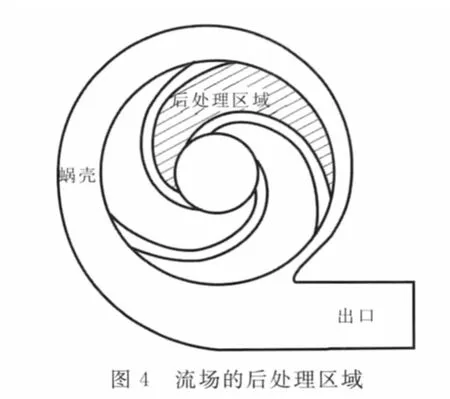
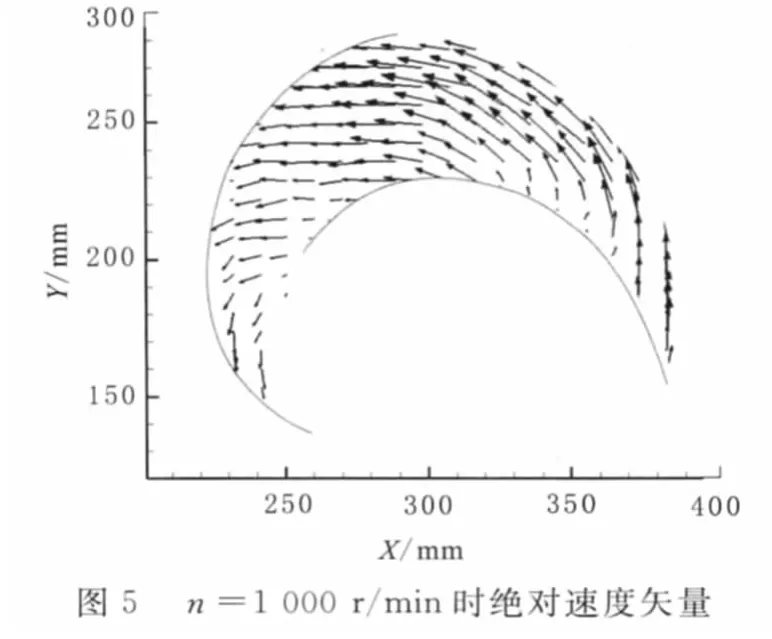
试验时,扇形激光穿过蜗壳射入泵内,相机垂直于片光从蜗壳的正面进行拍摄,这样可以拍摄到叶轮及蜗壳全域的瞬态流场。采用空心玻璃球作为示踪粒子,将泵的背面和连接螺纹孔涂成黑色以提高图像的信噪比,实验发现除了泵轴末端和叶片末端等少数地方存在反光外,整个泥泵内部画面清晰,几乎没有拍摄死角。在电机的轴端安装同步编码器,采用外同步的锁相技术,测量转速分别为500r/min和1 000r/min 2种情况下的清水流场。实验采用粒子图像序列采集方法,对每一次采集的15组瞬时流场数据进行平均,获得各转速下的流场。这里仅选取叶轮中的一个流道进行数据处理和分析,如图4所示。同时将测量所得的绝对速度数据导入TECPLOT软件,得到水质点的绝对速度矢量。叶轮流道内与坐标轴平行的网格上的绝对速度分布如图5所示。
根据绝对速度、相对速度以及牵连速度的矢量三角形关系,编程计算得到叶轮流道内相对速度矢量。绘制了半径r分别为60mm,70mm,80mm,90mm,100mm 5个不同半径圆弧段上质点的相对速度,如图6所示。
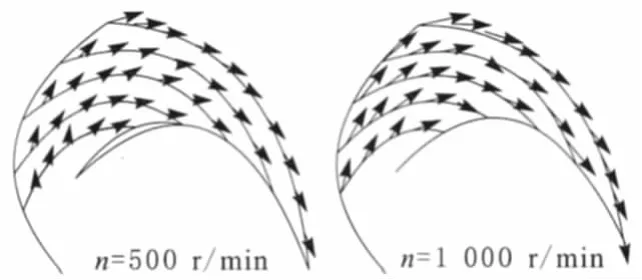
图6 n=不同转速下相对速度矢量
根据图5、图6可以看到:①泵内流体的绝对速度趋向于叶轮的旋转方向,越靠近叶片的出口处,绝对速度越大;相对速度基本沿叶片间的流道方向,出口处近似沿叶片的切线方向甩出[4];②整个流道内,叶片吸力面附近的相对流速普遍高于同一半径上压力面附近的相对流速,从吸力面到压力面呈下降趋势,最高相对流速出现在吸力面的出口处,整个流道内流动呈非对称性。
图7为不同转速下叶片吸力面和压力面附近相对流速随半径的的变化情况,由此可以看出,随着半径的增大,吸力面和压力面的相对速度大小均有增大趋势,转速越高,增加越明显。
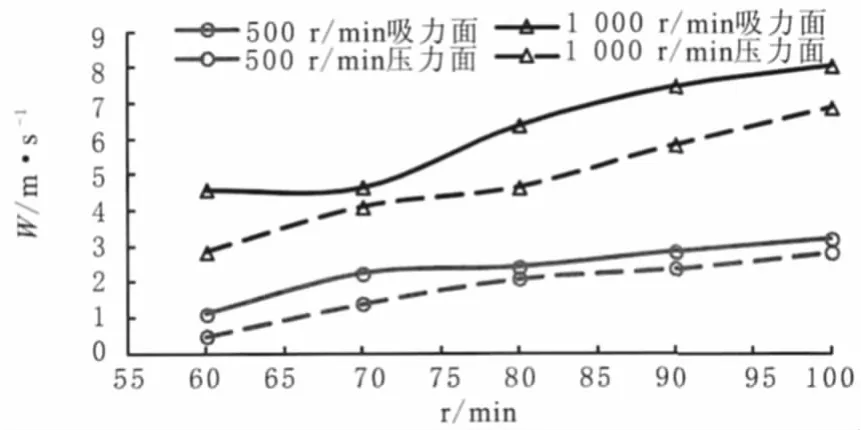
图7 不同转速下吸力面、压力面相对速度
3 结束语
模型泵的清水PIV实验表明,全透明有机玻璃模型泵结构合理,能够满足PIV全域测量要求。初步获得的泵内流体的绝对速度和相对速度矢量,以及叶片吸力面和压力面附近流体的相对速度分布,符合离心泵叶轮内流场的一般规律,为下一步实施水力输砂固液两相流研究奠定了基础。
[1]高 瑛,李淑红,李金生.船用挖泥泵内部流动研究[J]水泵技术,2005,(2):29-30,38.
[2]Feng J,Benra F-K,Dohmen H J.Unsteady flow visualization at part-oad condition of a radial diffuser pump:by PIV and CFD[J].Journal of Visualization,2009,12(1):65-72.
[3]李亚林,袁寿其,汤 跃.离心泵内部流动PIV测试研究进展[J].水泵技术,2010,(5):1-5.
[4]杨 华,刘 超,汤方平,等.采用PIV研究离心泵转轮内部瞬态流场[J].水动力学研究与进展,2002,17(5):547-552.