基于Hough的图像分割在智能车图像处理中的应用
2013-03-30侯代坡韩致信
王 烁,孙 备,侯代坡,韩致信
(兰州理工大学机电工程学院 甘肃 兰州 230050)
0 引言
图像处理是以摄像头传感器为检测元件的智能车实现控制并稳定运行的基础,图像处理的优劣直接影响到控制策略能否准确实现,而判断图像处理优劣的标准是能否准确地区分出黑色跑道与白色背景以及其他干扰信息。
摄像头提取的信号是被动的接受反射回的光线,因此,采集的图像受外界环境的影响较大,例如,一些黑色跑道很可能由于发生镜面反射而丢失信号。此外,智能车实际用的是经过A/D转换之后的模拟图像,模拟的图像在传输和转换到数字图像的过程中带入大量的噪点,给实际应用带来许多困难。最后由于飞思卡尔单片机实际内存空间和运算能力有限,所以实际应用中的程序不能太大,运算的时间也不能大于20ms。
智能车的图像处理多采用单像素处理方式,即对临近一个或几个像素点之间进行灰度值比较[1-2],导致采集的数据的不能被有效利用。另外,在智能车图像处理中可以引入合成孔径雷达SAR(synthetic aperture radar)图像识别方 法[3-4]。但是由于在SAR图像中的数据量相较智能车中的数据要大得多,所以应进行数据的简化。
对基于摄像头传感器的智能车采集图像进行处理,实现了由双跑道到单跑道的转换,为控制策略的准确实现和控制稳定性及速度提升开拓了广阔的空间。
1 图像的边缘检测
1.1 边缘检测
经研究发现,在飞思卡尔智能车摄像头组控制中,智能车在低速时仍然跑出去的根本原因在于外界的干扰。也就是说外界黑色的背景由于光线的反射,变成了白色。而临近的地方仍然是黑色的,最终将此区域误认为是白色背景和黑色跑道,造成智能车在低速时仍然向外冲。
在实际应用中,系统获取的原始图像由于许多因素的干扰而变得不完美,例如,室外光照不够均匀;CCD获得的图像在经过A/D转换、线路传输过程中都会产生噪声污染等。轻者表现为图像不干净,难以看清楚细节,重者表现为轮廓模糊不清。因此,在图像分析之前,要进行图像的预处理,对图像的质量进行改善。常用的改善的方法有:图像增强和图像复原。利用图像复原需要了解图像模糊的先验知识,要建立相应的退化模型,并且利用软件或者硬件消除这种影响,这种工作费时且鲁棒性不佳,采用得较少。
图像的增强不考虑图像质量下降的原因,只将图像中感兴趣的特征有选择的突出,并且衰减不需要的特征,从而提高图像的可懂度。图像增强的方法分为空域法和频域法,空域法主要是对图像中的各个像素点进行操作;而频域法是在图像的某个变换域内,修改变换后的系数,如傅立叶变换、DCT等的系数,对图像进行操作,然后再进行反变换得到处理后的图像。由于频域法运算复杂,结合智能车图像运算速度的要求。因此,考虑的是利用空域图像增强的方法进行边缘检测。
[5]中将图像边缘描述为:边缘是灰度值不连续的结果。这种不连续常可利用求导数的方法检测,一般常用一阶导数和二阶导数来检测边缘。由于在智能车中用的是数字的摄像头,灰度值是不连续的,这里说的灰度值不连续可以理解为在智能车图像中进行二值化之后的数字图像。利用边缘检测来分割图像的基本思想是:先检测图像中的边缘点,再按照某种策略将边沿线连接成轮廓,从而构成分割的区域。
边缘检测可借助空域微分算子通过卷积完成。实际上数字图象处理中求导数是利用差分近似微分来进行的[5]。Sobel算子作为梯度算子的一种,在实际应用中效果较好。梯度对应一阶导数,梯度算子是一阶导数算子。对一个连续的函数,它在位置梯度可表示为一个矢量:

在实际应用中,常用小区域模版卷积来近似计算。经典的Sobel算子就是在图像空间利用2个方向模版与图像进行临域卷积完成[6]。这2个方向模版一个检测垂直边缘;另一个检测水平边缘。矩阵中模版的数字为模版系数,边缘方向和梯度方向总是正交垂直的。
水平梯度算子模版为:

垂直梯度算子模版为:

门限设为0.07时,利用Sobel算子计算方法得到的图像如图1所示。可以找到2条直线的4条边界。
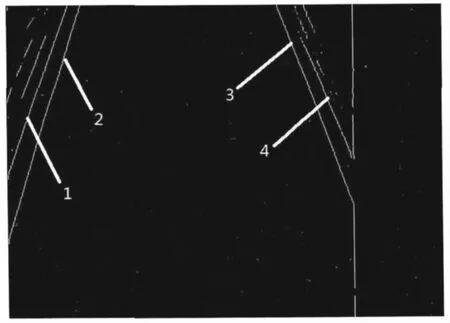
图1 利用Sobel算子得到的图像
1.2 边缘阈值
只要选取一个适当的灰度级阈值T,然后将每个灰度和它进行比较,将灰度值超过阈值的重新分配到1,低于阈值的分配到0,那么就可以组成一个新的二值图像,这样就可以把目标从背景中分离出来。然而,目前还没有统一的图像增强质量的评价标准,主要还是依据人的主观感觉对图像的视觉效果进行评价[7]。
图像的灰度门限值(阈值)的变换函数形式为:

不同阈值下的图像效果如图2所示。可以看出,如果选择合适的阈值,可以将外界的干扰点部分排除,但是做不到完全排除。如图2中当阈值选为65时,外界干扰并未完全排除。

图2 不同阈值下的图像效果
2 Hough变换
为了提高排除噪点的可靠性,可以提取跑道的黑线边缘,然后求出中间线。这样双跑道的问题就可以转化到单跑道考虑,简化了问题,提高了智能车的稳定性。
Hough变化是一类常用检测包括直线在内的参数化曲线的方法。在实际跑道上只有几种具体的特征,利用点对线的对偶性,从而检测图像是否具有给定的曲线特征。Hough变换的基本原理是:将直线上的每个数据点变换为参数平面中的一条直线或一条曲线,利用共线的数据点对应的参数曲线相交于参数空间中一点的关系,使直线的提取问题转化为计数问题[8]。具体的说,就是对于满足y=ax+b的某一点(x0,y0),对应参数平面(a,b)上的一条直线b=y0-ax0,而来自同一条直线y=ax0+b0上的所有数据点对应的参数平面上的直线,必然相交于真实的参数点(a0,b0)。另外,为了避免垂直直线斜率问题,在应用时常采用直线的极坐标方程ρ=xcosθ+ysinθ,此时参数平面为(ρ,θ)平面。如图3所示。

图3 Hough变换的基本原理
3 实验过程及分析
在经过Hough变换后,提取出重要的直线如图4所示。

图4 经Hough变换后的图像
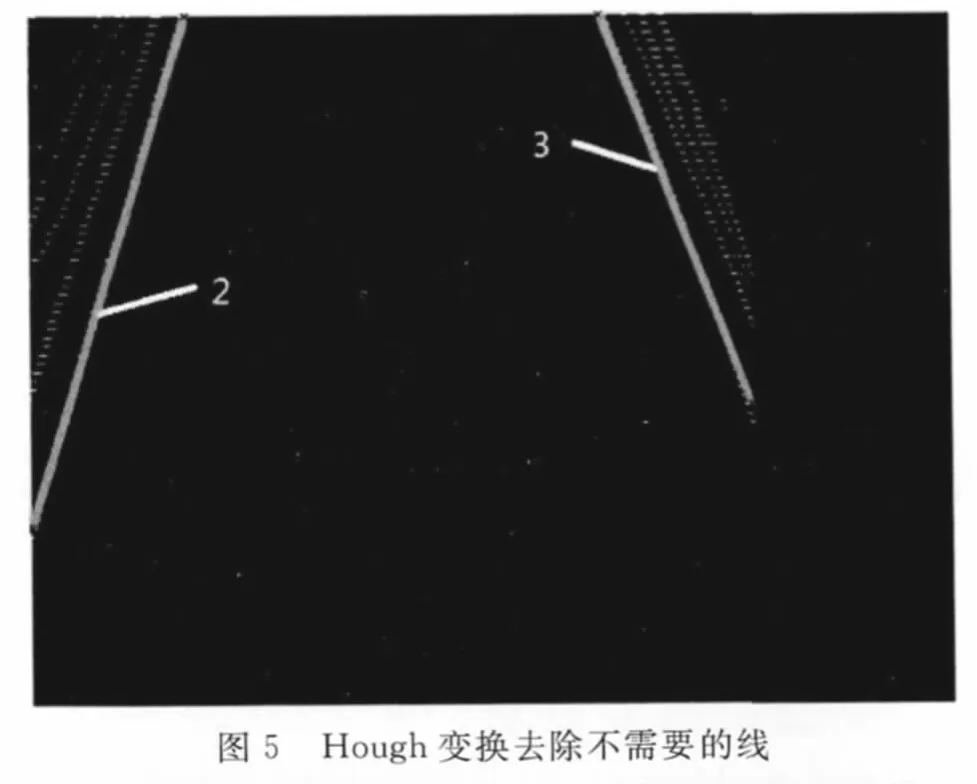
在图4中,线1,2,3为重要直线,下一步的任务是将线1去除,留下中间的两条直线2、3,最后求出中间两条直线的中心线。在图4中,利用强化约束条件的方法去除直线1,结果如图5所示。然后,经过求端点行、列中心值的方法求出直线4,如图6所示。在图6中,直线4就是要求的目标线,这就为后续的控制工作提供了依据。

在实验中,利用OV6620数字摄像头拍摄图像和EASYCAP图像采集卡传输图像。在Matlab平台上,利用Hough变换对原图像进行处理。
边缘检测的结果与门限制的选取关系很大,门限条件放宽,检测出边缘点的信息较丰富,同时虚警也较多。否则,检测出的边缘较少,虚警也较少,同时边缘图像中道路的形状保持得不好,断裂严重。为了尽可能地检测出道路,实验中将门限设置得比较宽松,因此,道路检测中出现了虚警。
在实验过程中,由于摄像头与单片机工作频率不匹配,图像中出现了黑边。作者利用减少扫描列的办法忽略右侧的黑边。另外,在实验中容易出现道路中断的现象,通过分析发现是外界光线太强造成的。由于道路的反光性强,出现了镜面反射,造成“断线”。为了尽可能地检测到直线,用加大中间连接线长度的办法将其连接。最终实现了把2条跑道转化成1条跑道的目的,简化了问题,为控制策略的实现提供了依据。
4 结束语
提出了基于Hough变换的图像分割技术在智能车图像处理中的应用,实现了赛道的准确提取,解决了赛车在低速下依然冲出去的问题。实验结果表明,利用目标的灰度和轮廓变化能够准确地分割目标,抗模糊能力强,有利于平滑去噪,有很好的鲁棒性。利用给定的阈值和Hough变换的方法对图像进行处理,准确提取出了2条黑线的边缘并且求出了双跑道的中心线。当智能车在弯道上,实际图像中只出现1条黑线时,如何准确求出中线是后续工作的重点和难点。
参考文献:
[1]田 雨,黄 波,邓小飞,等.第六届 “飞思卡尔杯”全国大学生智能汽车竞赛电子科技大学海盗旗队技术报告[R].成都:电子科技大学,2010.
[2]刘 立,杨 钰,贺亮亮,等.第六届“飞思卡尔杯”全国大学生智能汽车竞赛北京科技大学摄像头一队技术报告[R].北京:北京科技大学,2010.
[3]贾承丽,匡纲要.SAR图像自动道路提取[J].中国图象图形学报,2005,(10):1218-1223.
[4]赵凌军,贾承丽,匡纲要.SAR图像边缘检测方法综述[J].中国图象图形学报,2007,(12):2042-2049.
[5]章毓晋.图像处理和分析基础[M].北京:高等教育出版社,2002.
[6]章毓晋.图像工程(上)图像处理与分析[M].北京:清华大学出版社,1999.
[7]章毓晋.图像分割评价技术与比较[J].中国图象图形学报,1996,(6):151-157.
[8]张德丰,等.Matlab数字图像处理[M].北京:机械工业出版社,2009.