基于三菱PLC的实训系统设计与开发
2013-03-26王亚进李志梅
王亚进,沙 健,李志梅
(沙洲职业工学院,江苏张家港 215600)
0 引言
可编程控制器(PLC)以其特有的优势,已经广泛应用于工业生产过程自动控制的各个领域,它与CAD/CAM、机器人技术一起被誉为当代工业自动化的三大支柱。很多高校对这方面的人才培养也一直很重视,普遍开设了PLC相关课程,实验或实训室也加大了投入力度,添置了各种实训装置与实验设备,一定程度上培养了学生动手实践的能力,满足了基础教学对PLC实践的基本需求。但很多实训系统,因其开放程度不高,灵活组建自己的控制模块受限制,市场上有灵活组建自己模块的实训系统,但往往售价又偏高。基于此,设计研发了一种开放程度高、模块化程度强的实训装置,既满足了实际需求,又锻炼了学员实践与实际解决工程问题的能力。
1 机械结构部分设计
SolidWorks是一款全参数化三维CAD建模软件,功能强大、易学易用,因此借助其进行实训系统机械结构部分的设计与制作。
1.1 供料操作平台设计
供料操作平台分为两部分:料仓推出平台、机械手操作平台。
机械手是指能够按照固定程序实现自动抓取、搬运物料等自动操作的装置。本实训系统中,设计的机械手主要完成夹爪的松开/夹紧、上升/下降、前进/后退、右旋/左旋等功能。前进/后退以及上升/下降分别采用带导杆的两气缸来实现,两气缸通过中间转接板连接。连接后水平的导杆气缸又通过转接板与回转缸相连接以实现整体的回转运动。垂直导杆气缸与夹爪缸连接以实现物料的松开/夹紧。物料从料仓中的推出,采用笔型气缸来实现。笔型气缸前部连接推板推出料仓工件,以推板缩回时不挡上方物料的下降,推出时承载上方的物料且不出料仓为宜。其余采用截面积为20 mm×20 mm的铝型材及厚度为10 mm的铝板材搭建框架,实物图如图1所示。
1.2 物料分拣单元设计
皮带分拣单元主要完成大中小物料、或是不同材质物料、或是不同颜色物料的分拣,具体由编程决定。总体结构分两节传输带,上位传输带电机选用步进电机驱动,下位传输带电机选用三相普通电机驱动。入料口选用圆柱型漫射式光电开关感测物料有无,选用光纤式光电开关检测物料黑白颜色。皮带两侧板安装不同高度的漫射式光电接近开关用于检测物料大小。例如:可以编程实现中等物料由上位传输带右侧滑出,大或小的物料由推料气缸推出,入滑槽孔,从而落到下节传输带,电机正转或反转从而实现大小分拣。总体实物图如图2所示。

图1 供料操作平台实物图
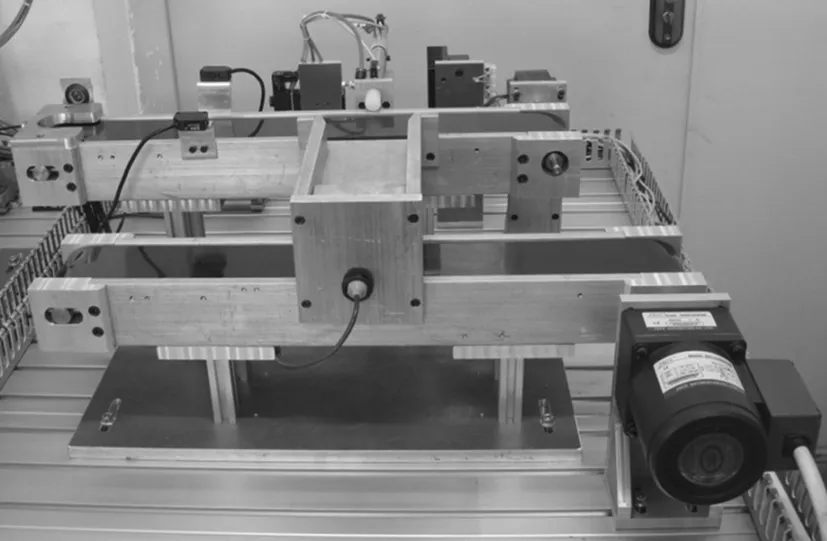
图2 物料分捡单元实物图
2 PLC控制系统设计
2.1 配电模块设计
外部供电电源为三相五线制AC 380V/220V,图3为供电电源模块一次回路原理图。其中,总电源开关选用DZ47LE-32/C16型三相四线漏电开关。系统各主要负载通过自动开关单独供电。其中,变频器电源通过DZ47C10/3P三相自动开关供电,工作站PLC采用DZ47C5/1P单相自动开关供电。此外,系统配置1台DC24V6A开关稳压电源用作供料操作及分拣单元的直流电源,实物图见图4。
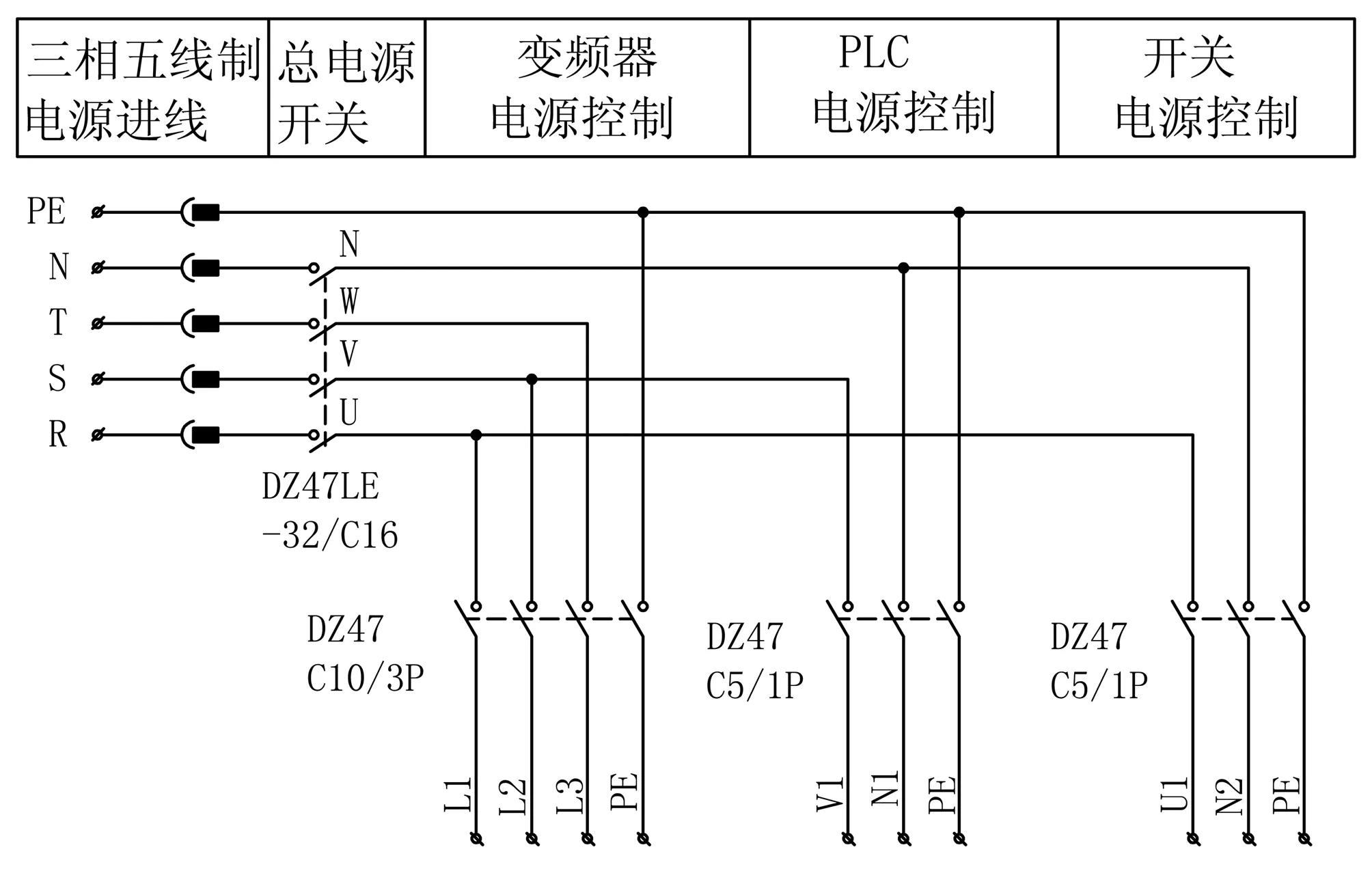
图3 配电一次回路原理图

图4 配电模块实物图
2.2 PLC控制系统设计
(1)PLC的I/O分配
考虑到高速脉冲输出,选用三菱MT的系列PLC:FX2N-64MT。输入点用到28点,主要用于装置侧传感器检测信号的采集;输出用到16点,主要用于气动回路电磁阀驱动信号。具体PLC的I/O信号分配表如表1所示。
(2)步进电机驱动接线
考虑到校内已有的实训设备中使用的常用电机,涉及到步进电机安装、接线及编程调试并不多,故本实训系统选用Kinco三相步进电机3S57Q-04056以及配套的驱动器Kinco 3M458。步进电机驱动侧接线详见图5。
八位DIP功能开关用来设定驱动器的工作方式和工作参数,根据需要,本系统中设定:细分精度设置为10 000步/转,电动机驱动电流5.2 A,静态锁定方式为静态半流,详见表2。
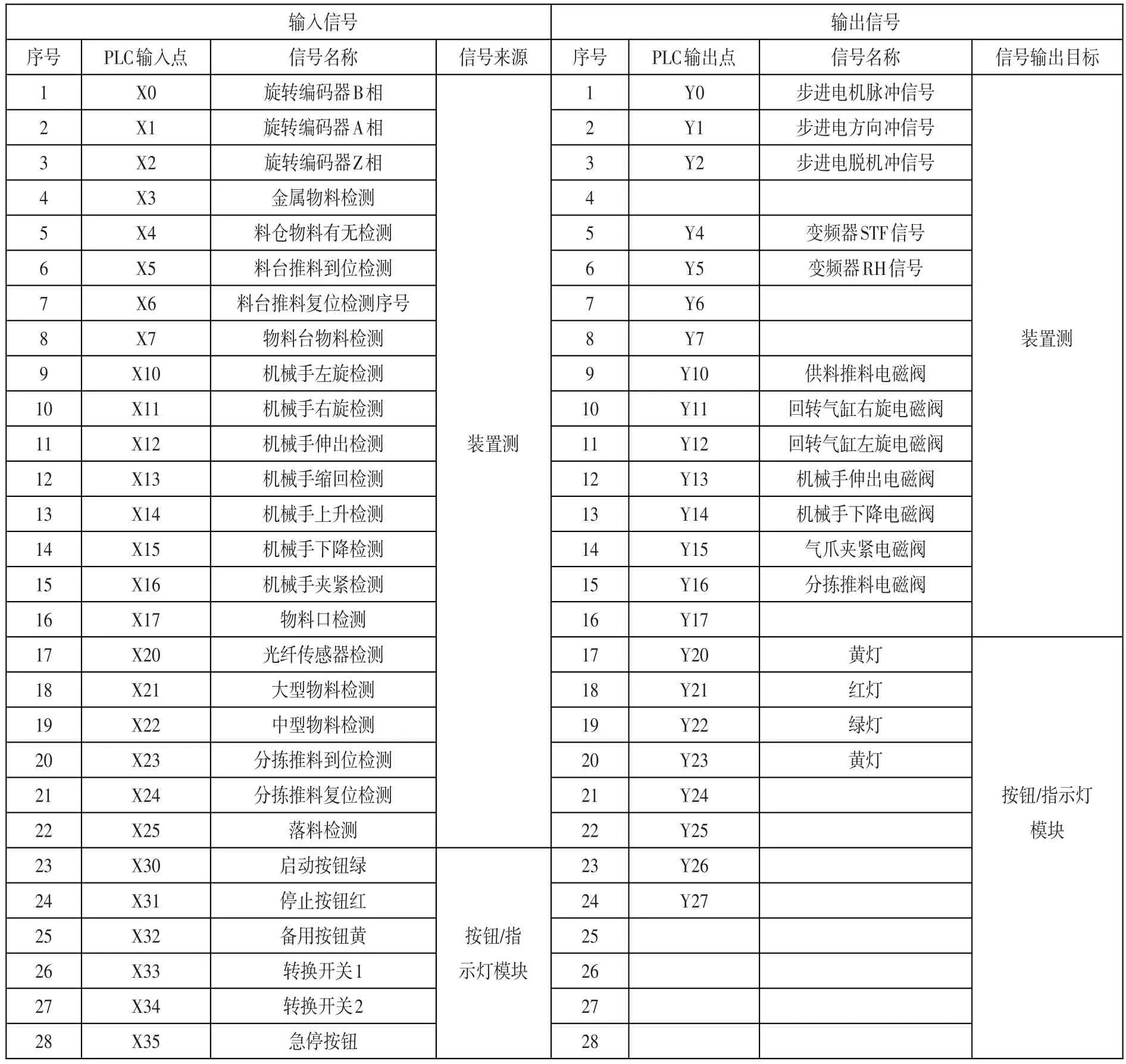
表1 PLC的I/O信号分配表
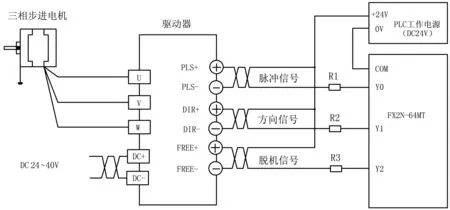
图5 Kinco 3M458的接线图
(3)人机界面输入的模拟量转速控制
为了让学员熟悉触摸屏并学会其使用,本实训系统系统选用昆仑通态研发的人机界面TPC7062KX,MCGS嵌入式组态软件组态。所做的组态画面效果如图6所示,涉及到的各元件所对应的PLC通道地址如表3所示。
为了实现变频器输出频率连续调整的目的,在PLC侧,连接了数模转换模块FX0N-3A,系统的启停采用触摸屏或按钮指示灯模块上按钮实现,其控制程序部分如图7所示。

表2 DIP功能设定表
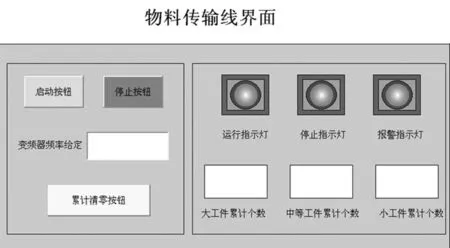
图6 物料分拣界面组态设计
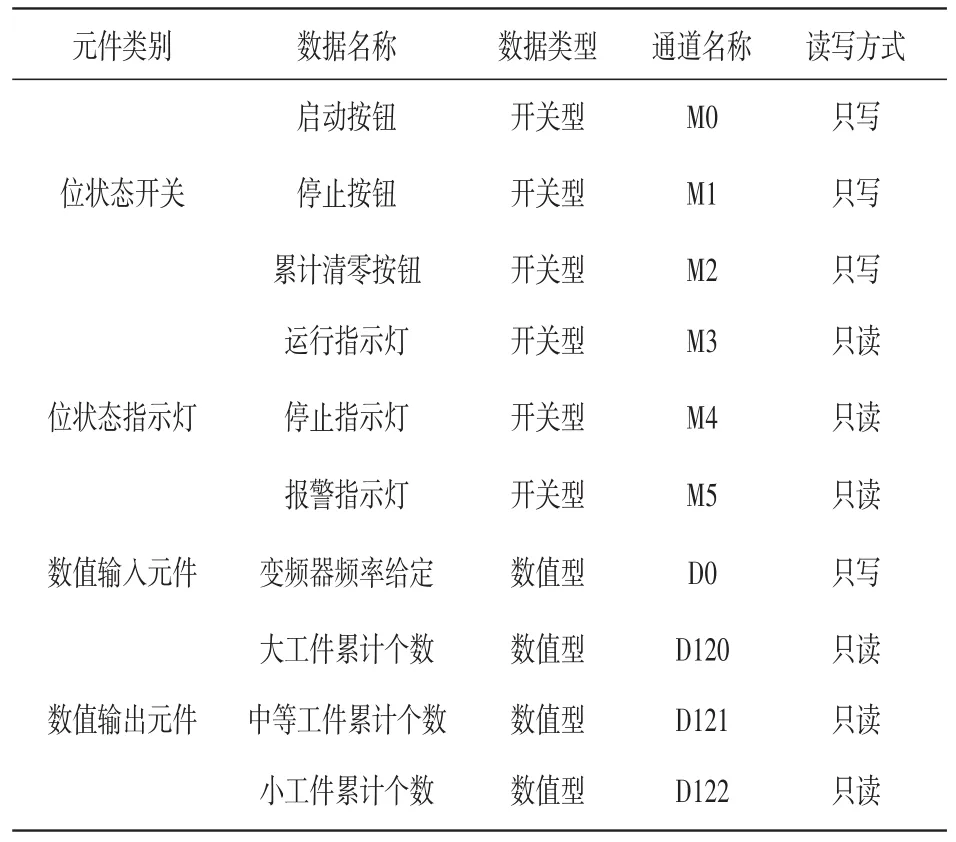
表3 触摸屏组态画面各元件对应通道地址
3 气动回路设计
机械手操作平台侧的出料气缸以及分捡单元上位传输带处推料气缸均采用SMC的CJ2系列的ϕ16标准型气缸,行程150、250,内置磁环。机械手水平及垂直方向的位移采用HITOP的带导杆的气缸GD16X100,GD16X300来实现。松开及夹紧采用CHELIC的HDZ20夹爪缸来实现,旋转功能采用RTB10-A2回转缸来实现。选用AIRTAC的双作用电磁阀,配备相应的汇流板、消声器、转接头以及调速阀。搭建的气动回路如图8所示,总体实物图如图9所示。

图7 模拟量控制部分程序
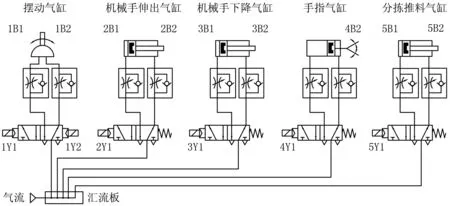
图8 气动回路原理图
4 结束语
根据实际需要,在老师的指导下,师生自己动手设计研发实训系统,对增加学生感性认识,应用和发展现有理论,对培养学生具有良好的工程意识,较强的实践能力、敏锐的创新能力,较高的综合素质都具有举足轻重的作用。
