雷达天线车液压升降系统同步控制仿真研究
2013-03-09凌轩王旭东陈赛克
凌轩,王旭东,陈赛克
(仲恺农业工程学院机电工程学院,广东广州 510225)
雷达天线车液压升降系统同步控制仿真研究
凌轩,王旭东,陈赛克
(仲恺农业工程学院机电工程学院,广东广州 510225)
雷达天线车自动调平系统是雷达的一个重要组成部分,对提高雷达的测量性能和机动能力起着决定性作用。为了解雷达车电液升降系统的同步协调特性,采用MATLAB和Simulink软件建立了系统调平模型并进行了仿真研究。为消除电液调平系统液压缸参数制造误差、各通道负载不均衡等对同步控制精度的影响,设计了定量反馈控制 (QFT)同步调平控制器来提高倾角调平精度。仿真结果表明:设计的调平控制器具有良好的同步精度和快捷的响应速度,能驱动调平仿真台快速、稳定地运动。
雷达天线车;仿真;同步协调特性;定量反馈控制
在现代高技术战争中,雷达正发挥着越来越重要的作用。雷达在正常工作前必须要调平,据文献报道调平过程要占雷达工作时间的1/3,因此研究缩短雷达调平时间和增加雷达机动性的方法具有重要意义[1-3]。随着液压传动技术在现代雷达天线车架设和撤收系统中的广泛应用,对雷达天线阵面液压升降系统的同步性能也提出了更高的要求。雷达天线阵面两侧液压升降系统动态特性的不一致,是升降系统不同步的重要因素[4-7]。作者应用液压伺服控制技术来装备和改造现有系统,并利用MATLAB和Simulink仿真软件对雷达天线车液压升降系统的同步协调控制特性进行相关仿真分析,为实际升降系统的同步控制提供参考。
1 雷达车液压升降系统工作原理
1.1 液压升降系统工作原理
雷达车液压升降系统原理如图1所示。

图1 电液伺服调平系统结构图
油泵4为伺服缸10和伺服阀8提供驱动油源,然后驱动这些伺服缸运动到所需位置。伺服缸位移被位移传感器LVDT 9实时检测并输入到工控机12进行处理。工控机对输入信号和给定信号进行比较并产生系统控制信号通过D/A口驱动伺服阀完成调平过程。压力传感器11能检测平台各支腿位移。
为了消除工作地面不平整和在重压之下的下陷等影响,两侧升降装置的液压缸是完全独立的,以满足平台两侧倾角调平需要,保证座车水平。
1.2 液压调平控制方法
选用倾角误差控制调平法,如图2,主要原理是通过4个伺服油缸的运动直接控制倾斜角。方法为:调平时首先同时调节两个支点至一个水平方向,然后再同时调节另外两个支点至水平。两个倾角α、β中,通常先让角度大的减少,并保持最高点不动。如图2所示的雷达天线车液压平台,设α、β分别为平台x轴和y轴的倾角,δ是设定的调平精度,可编制出调平算法为:当β>δ时,支腿A、D同时上升;当β<-δ时,支腿B、C同时上升;当β<
δ∩α>δ时,支腿C、D同时上升;当β<|δ|∩α<-δ时,支腿A、B同时上升。其中,±δ为设定的倾角误差范围。采用角度调平法易于实现计算机自动控制,调平精度较高,对平台结构在调平过程中造成的“伤害”最小,调平过程较平稳,震动小。倾角误差控制调平法的优点是协调性好,算法简单,很好地绕过复杂的解耦计算;缺点是调节时间稍长,可能会遇到“虚腿”问题,同时因为独立调整两个方向时会影响另一方向的水平度。当采用倾角调平时,为了解决“虚腿”问题,必须尽量保证两个支腿的位移和速度一致,即有同步要求。如果两条支腿的速度不同,会导致平台不断震荡调平,影响调平精度,甚至会引起倾覆,这是不希望看到的。
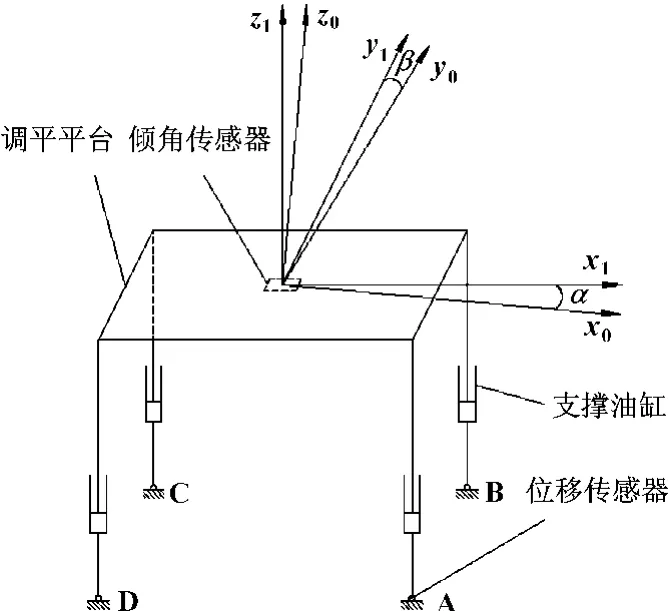
图2 雷达车调平仿真台结构图
2 雷达车倾角调平仿真
2.1 雷达车液压调平仿真分析
如果电液伺服系统各个通道的性能参数完全一样,那么各液压缸的位移就完全一样,不会有同步误差产生。但实际系统中由于存在负载不均衡、摩擦阻力、液压缸泄漏量的不同、空气的混入和制造误差等因素,都会影响同步精度。
为了考查液压调平升降系统的同步协调性能,应用MATLAB的SimMechanics工具箱建立物理仿真分析模型,如图3所示。模型搭建好后,取a=1 m,b=1 m,h=0.5 m建立雷达车4点支撑调平台物理模型如图4。仿真中模拟实际升降过程中液压缸所受负载不同及摩擦系数不同,液压缸1负载为4 700 N,黏性摩擦系数3 000 N/(m/s);液压缸2负载设为5 000 N,黏性摩擦系数6 000 N/(m/s)。得到两个伺服缸位移变化曲线如图5所示。

图3 雷达车调平台SimMechanics仿真模型
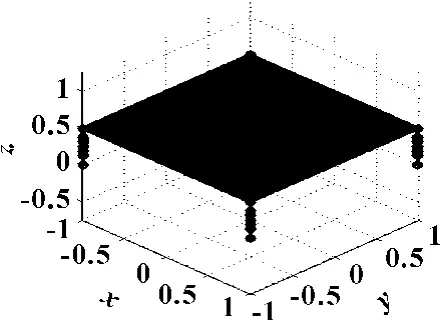
图4 雷达车四点支撑调平台物理模型
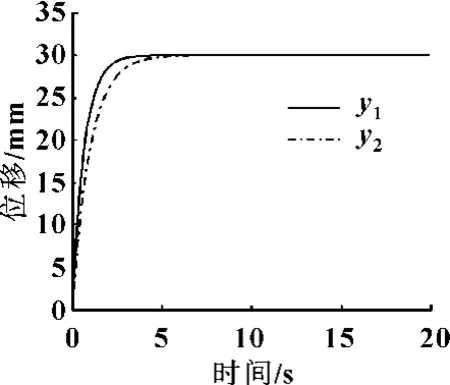
图5 平台调平过程中支腿位移变化曲线
由仿真曲线可以看出,受力大、黏性摩擦系数大的液压缸伸缩速度要慢些。由于两个液压缸的位移、速度不同,易导致天线阵面倾斜,严重时设备甚至不能正常工作,因此有必要采取同步控制策略。
2.2 雷达车液压调平控制系统建模及仿真
雷达天线车液压升降同步控制系统属于一种电液伺服闭环同步控制系统,作者设计了一种二缸主从位置同步系统,如图6所示:把液压缸1作为主液压缸,液压缸2作为从液压缸,以液压缸1的输出y1为理想输出,液压缸2的输出y2受到控制来跟踪这一选定的理想输出。

图6 倾角调平QFT同步控制器模型
为了达到y2很好地跟踪y1的效果,关键在于位置控制器设计的好坏。由于电液伺服调平系统自身的特点,采用常规的数字PID控制器很难达到良好的效果。作者提出采用定量反馈 (QFT)同步调平控制器来解决由于液压元件制造误差、通道负载不均衡等影响同步精度等问题,具体设计方法可参考文献 [8],最终设计结果见公式(1)—(3):
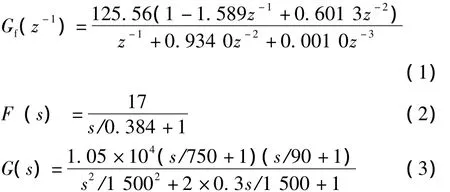
图7为采用定量反馈同步调平控制两个液压缸位移的仿真曲线图。可以看出:加了同步误差补偿后,两缸的最大位移误差仅为1.8 mm,该控制器有比较好的同步精度。倾角调平仿真曲线如图8所示,可以看出:平台先使倾斜较大的x轴水平后,再使y轴达到水平。平台基本上是在不同时间内只绕一个边转动,调平精度可达5'以内,满足系统设计要求。

图7 带同步误差补偿跟踪位移输出曲线
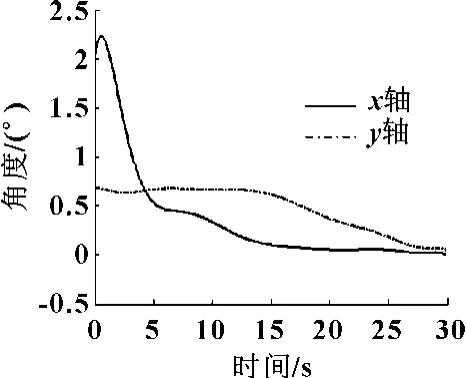
图8 雷达天线车倾角调平曲线
3 结论
对雷达天线车液压升降系统的同步控制进行了仿真分析。由于存在负载不均衡、摩擦阻力、液压缸泄漏量的不同、空气的混入和制造误差等因素,都会影响同步精度,因此有必要采取同步控制策略。仿真结果表明:应用作者设计的定量反馈同步调平控制器能大大提高天线液压升降系统的同步性能,明显改善雷达天线车的架设和撤收性能。
【1】冯天麟,唐晓群.塔架式高机动雷达天线车的研究[J].电子机械工程,2004(4):19-21.
【2】李小波,孙志勇.雷达天线自动调平系统的设计与实现[J].现代雷达,2006,28(7):74-76.
【3】倪江生,翟羽健.雷达天线车座调平问题的研究[J].测控技术,1994,13(4):36 -39.
【4】梅志松,焦晓红,刘晓飞.双缸电液提升系统的鲁棒输出反馈同步控制[J].机床与液压,2011,39(19):10 -15.
【5】姜浩,刘衍聪,张彦廷,等.浮式钻井平台升沉模拟系统设计[J].机床与液压,2012,40(1):92-95.
【6】凌轩,曹树平,朱玉泉,等.基于模糊自适应控制的四点支承液压平台自动调平方法[J].机床与液压,2007,35(11):84-86.
【7】LING Xuan,LIXiaohui,ZHU Yuquan,et al.Adaptive Fuzzy Sliding Mode Control of Automatic Leveling Mechanism for Radar Antenna Truck[C]//Proceedings of the5th International Symposium on Fluid Power Transmission and Control,Beidaihe,China,2007.
【8】LING Xuan,LIXiaohui,ZHU Yuquan,et al.QFTRobust Control Combined on ZPETC for Radar Truck Leveling Simulator[J].Jounal of Shanghai University,2009,13(5):384-390.
Simulation Analysis of Synchronization Control of Hydraulic Lift System for Radar Antenna Truck
LING Xuan,WANG Xudong,CHEN Saike
(College of Mechanical& Electrical Engineering,Zhongkai University of Agriculture and Engineering,Guangzhou Guangdong 510225,China)
Radar leveling system is the key equipment for improving radarmobility and survival capability.Simulationswere carried out to study synchronization capability of hydraulic lift system of radar antenna truck by using MATLAB and Simulink.To eliminate the influence of the manufacturing errors of cylinders and load disturbance on the synchronization control precision,the QFT(quantitative feedback theory)leveling controller was put forward.Simulation results demonstrate the designed controller has high synchronization accuracy and fast dynamic response aswell as stability.The leveling controller can drive the radar truck leveling platform accurately,quickly and stably.
Radar antenna truck;Simulations;Synchronization capability;QFT
TH137
A
1001-3881(2013)8-081-3
10.3969/j.issn.1001 -3881.2013.08.029
2012-02-05
凌轩 (1974—),博士,讲师,主要从事自动伺服控制方面的研究工作。E-mail:mysoar@163.com。
