机械手在锻压生产中的应用研究
2013-03-09黄银花赵仕奇
黄银花,赵仕奇
(淮安信息职业技术学院,江苏淮安 223003)
机械手在锻压生产中的应用研究
黄银花,赵仕奇
(淮安信息职业技术学院,江苏淮安 223003)
为了提高我国锻压生产的自动化水平,减少加工过程对操作人员的危害,实现绿色锻压,有必要根据我国锻压行业的现状,应用锻压机械手代替人工完成锻压生产过程中的上料、翻转、下料等危险性高、简单重复性、劳动强度高的工作,以提高生产自动化程度,提高生产率,提高产品一致性。在分析锻压生产现状的基础上,分析锻压过程中人工操作的动作流程,提出锻压机械手的结构形式、工作原理及运动方案,并阐述其应用的意义。
机械手;锻压生产;应用研究
从世界制造业及锻压行业的发展趋势来看,绿色制造、生产过程自动化是一种必然的趋势,现有锻压厂家均需要提高生产过程自动化程度,降低生产过程对工人的健康危害,提高生产效率及产品质量[1-2]。虽然我国是锻压大国,但却不是锻压强国,锻压设备的机械化、自动化程度也很低,多数锻压设备处于手工运料或半手工送料的落后状态。生产过程中,一般都是由工人用钳子将烧到1 000多摄氏度的坯料夹到锻压设备上,锻压过程中用钳子翻转工件,完成后再由人工用钳子将工件取出,加工过程中反复夹取钢铁工件,劳动强度大。高温以及重型的压力设备对操作工人时刻构成了严重的安全威胁。在国外,类似的自动化加工设备已经很多,如日本、美国、德国等都早已有类似的机器人系统及多种配有机器人的生产线长期工作于锻压生产线上[3-4]。
目前,锻压生产中应用的工业机械手大部分还属于第一代,主要依靠工人进行控制;改进的方向主要是降低成本和提高精度[5-6]。随着自动化的发展,机械手应用将更加普遍。现有的锻压机械手系统,一般都是和锻压机结合在一起,配置柔性较差。国内生产的机械手系统售价约60万人民币,国外所生产的系统售价更高。无论国内还是国外企业生产的锻压机械手系统,成本都较高,一般企业难以承受[7],所以研发新型机械手在低投入下实现自动化锻压送料至关重要。
1 机械手的总体设计方案
锻压机械手是面向锻压自动化生产而开发的工业自动化装置,是一项复杂的机电一体化工程项目[8-9]。研究开发内容包括:
(1)锻压机械手本体研究开发
机械手本体是系统的任务执行单元,也是系统的核心。根据对锻压过程中人工操作的动作流程分析,确定锻压机械手需要的动作方式及自由度数目,设计出锻压机械手的结构形式。根据特定的已有锻压设备,确定各轴需要的运动范围,进行实际的范围简化,在此基础上,进行机械手模型样机的整体机构设计。
(2)机械手控制系统开发
以工业PC机为平台,以现代运动控制技术为核心,开发一套控制系统。通过运动控制器动态控制各执行元件,从而控制机械手按运动的轨迹运动。
(3)机械手控制软件开发
设计一套界面友好、交互性强的锻压机械手控制软件,软件以Windos操作系统为平台,便于人机交互。通过软件,完成机械手运动轨迹规划,控制机械手按照一定路径完成操作任务。
(4)研究试验方法及技术路线
锻压生产中机械手应用的解决方案如图1所示。

图1 机械手研制具体实施方案
对特定工件的锻压过程进行分析,确定采用图2所示的机械手为锻压机械手基本结构形式,根据特定锻压设备的外形尺寸、操作尺寸、工件负载进行机械手模型样机具体外形尺寸及详细结构设计。合理划分锻压过程动作及流程,设置一些关键工艺参数,从而保证系统的柔性。
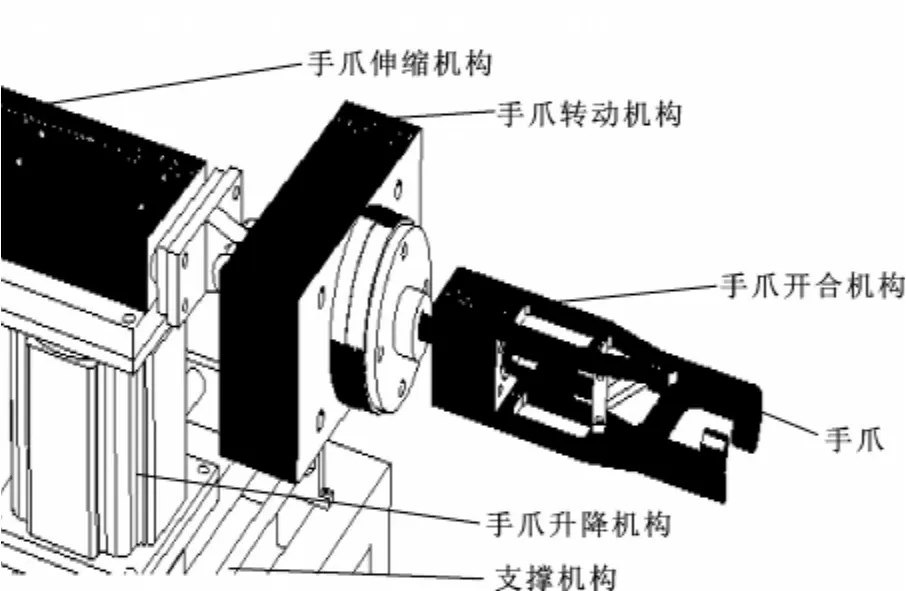
图2 机械手本体结构
机械手各运动轴实现精度如表1所示。
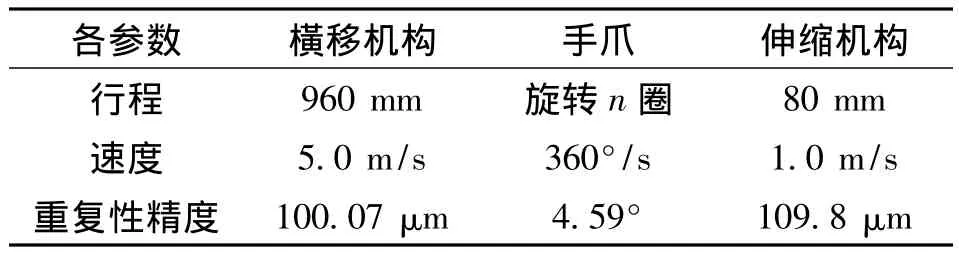
表1 机械手样机本体各轴运动精度
2 锻压生产中应用的机械手工作原理
锻压机械手通过手爪开合机构拉动手爪机构,使手爪能够开合自如,同时手爪端部为V型槽结构,可使抓取的工件自动定心;手爪转动机构可带着手爪和手爪伸缩机构进行90°转动,从而使工件能在锻压的过程中实现翻转;手爪伸缩机构可使手爪顺利达到抓取位置抓取工件,并能顺利地将工件放在锻模上;手爪升降机构能保证手爪将工件从放置位置拿起,并在锻压位置放下,在工件的搬运过程中防止与其他机构相碰;控制系统采用电气伺服与气动驱动的混合驱动方式,具有质量轻、响应快的特点。
3 锻压生产中应用的机械手运动方案
(1)取件
物料传感器检测到锻件;从初始位置开始,垂直气缸向上动作到顶端,上位磁性开关接通,电磁阀恢复中位;横向移动机构启动,向右运动,到右端限位光电开关变化,控制横向移动的伺服电机停止;水平气缸收缩,后端磁性开关接通,电磁阀保持线圈通电状态;垂直气缸向下运动到中位磁性开关接通,电磁阀恢复中位;电磁阀线圈断电状态,水平气缸推出,前端磁性开关接通,物品爪夹住锻件。
(2)锻件工序
物料传感器检测空气锤头,锤头抬起,传感器接收到信号,锻件才能被挪动和转动;踏板电机启动,上限位光电开关变化,向下运动到控制锻锤轻打位置;锻锤落下,抬起 (周期3次/s),一次0.43 s;锻件旋转电机从锻锤开始下落的0.19 s(锻打一刻的0.017 s后)开始旋转90°,零位光电开关变化,经历时间0.33 s;锻锤第二次锻打,后旋转锻件45°;之后重复前3步的过程若干次,直至预计直径变为44 mm;踏板电机启动,向下运动到控制锻锤重打位置;重复锻锤落下,抬起;锻件旋转电机,从锻锤开始下落的0.18 s(锻打一刻的0.017 s后)开始旋转90°经历时间0.33 s;锻锤第二次锻打,后旋转锻件45°;之后重复前两步的过程若干次,直至垂直气缸下位磁性开关接通,预计直径变为37 mm;踏板电机启动,向上运动到控制锻锤悬空位置。
(3)扔锻件
垂直气缸向上动作,到顶端,上位磁性开关接通,电磁阀恢复中位;横向移动机构启动,向左运动,左端限位光电开关变化,控制横向移动的伺服电机停止;垂直气缸向下运动到中位磁性开关接通,电磁阀恢复中位;锻件旋转电机旋转,零位光电开关变化,锻件旋转电机停止;水平气缸收缩,后端磁性开关接通,电磁阀保持线圈通电状态,物品爪张开,锻件掉落;垂直气缸向上动作到顶端,上位磁性开关接通,电磁阀恢复中位;横向移动机构启动,右端限位光电开关变化,向左运动到锻位一,控制横向移动的伺服电机停止;垂直气缸向下运动到中位磁性开关接通,电磁阀恢复中位;锻件旋转电机旋转,零位光电开关变化,锻件旋转电机停止;水平气缸收缩,后端磁性开关接通,电磁阀保持线圈通电状态,物品爪张开,锻件掉落。如图3为锻件旋转电机进给图,图4为步进电机进给图。
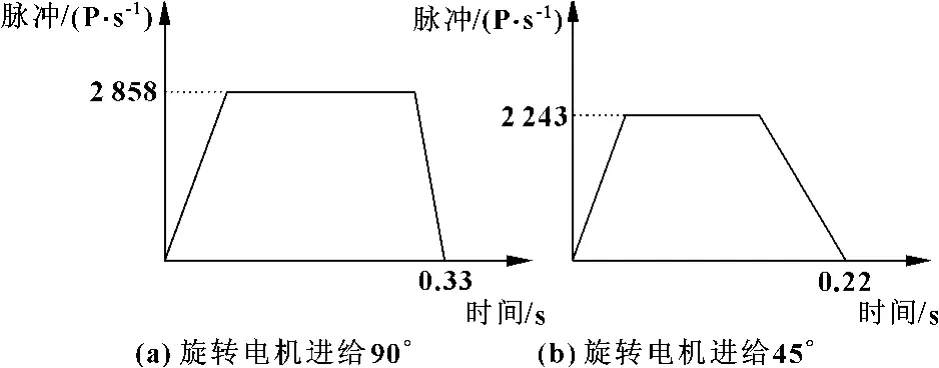
图3 锻件旋转电机进给图

图4 锻件步进电机进给图
4 结论
随着工业自动化的发展,机械手逐渐成为一门新兴的学科,并得到了较快的发展。机械手广泛应用于锻压、冲压、铸造、焊接、装配、机加工、喷漆、热处理等各个行业。特别是在笨重、高温、有毒、危险、放射性、多粉尘等恶劣的劳动环境中,机械手因其显著的优点而受到特别重视。该项目的成功研究,可以为后续的深入研究、推广打下坚实基础,只要再进行现有锻压设备锻压动作与机械手动作协调研究后,投资25万元即可实现自动化锻压。同时也可以在极端制造生产环境下推广应用,推动相关行业绿色可持续发展。
【1】夏鲲,徐涛,李静锋,等.工业机器人的发展与应用研究[J].广西轻工业,2008(8):63 -64.
【2】戴振华,朱春波.PLC控制的气动翻转压套机械手[J].机床与液压,1999(2):69-70.
【3】CRAIG John J.Introduction to Robotics:Mechanics and Control[M].3rd Ed.北京:机械工业出版社,2005.
【4】徐刚,鲁洁.从 CIMT2007看锻压机床的现状与发展[J].锻压装备与制造技术,2007,42(2):2 -9.
【5】朱梅.具有五自由度及张合气爪的液压机械手[J].机床与液压,2006(1):96 -97.
【6】鲁洁.第九届中国国际机床工具展览会(CIMES2008)锻压展品专题报道[J].锻压装备与制造技术,2008,43(5):2-4.
【7】臧华东.机电一体化技术培训系统的研发[J].宿州教育学院学报,2009(12):148-149.
【8】耿跃峰,夏政伟.四自由度搬运机械手液压系统设计[J].机床与液压,2012,40(2):42 -44.
【9】ANGELES Jorge.Fundamentals of Robotic Mechanical Systems:Theory,Methods and Algorithms[M].New York:Spriger-Verlag New York Inc,2003:13-129.
App lication of the Manipulator in Forging Production
HUANG Yinhua,ZHAO Shiqi
(Huaian College of Information Technology,Huaian Jiangsu 223003,China)
In order to improve the automation level of forging in our country,reduce harm to operators,realize green forging,it is necessary to combine the currentsituation of forging industry in our country,applying forgingmanipulator to replace themanual forging process for the production of feed,turning,cutting and other high risk,high labor intensity,simple repetitive work.This will improve the production automation level and product consistency,increase productivity.Based on the analysis of the present situation of forging production,the artificial action process of forgingwas analyzed.The structure,working principle and motion scheme of the applied forgingmanipulator were put forward,and the significance of its application was expounded.
Manipulator;Forging production;Application research
TP249
A
1001-3881(2013)8-031-3
10.3969/j.issn.1001 -3881.2013.08.012
2012-03-14
淮安市科技支撑计划(工业)资助项目 (HAG2010006);江苏省电子产品装备制造工程技术研究开发中心开发课题(SZKT2011-005)
黄银花 (1978—),女,博士,讲师,研究方向为先进制造技术、智能车辆。E-mail:ahua_09@126.com。
