一种新型超大视场小畸变光学系统
2013-03-05戚均恺周峰姚罡庄绪霞
戚均恺 周峰 姚罡 庄绪霞
(北京空间机电研究所,北京 100076)
1 引言
从实际需要出发,人们希望能够从尽可能大的角空域获取信息,因此大视场、结构紧凑的遥感器成为空间光学系统设计研究的热点。在某些场合下,不仅需要图像具有较高的分辨率,而且需要具有较大的视场。例如,2004年1月4日美国“勇气”号火星探测器在火星着陆,并对火星表面进行了探测; 次日,美国宇航局公布了“勇气”号火星探测器拍摄的火星三维全景黑白照片,随后又公布了火星表面的高分辨率全景彩照。这些全景图像都是由安装在“勇气”号上的全景相机获得。目前,国内外实现大视场成像探测的技术途径主要有小视场高分辨率扫描成像、鱼眼透镜超半球凝视成像、环带凝视全景成像3种,但均存在不足之处: 小视场高分辨率扫描成像的机构复杂,导致系统的实时性降低,同时也降低了系统的可靠性[1]; 鱼眼透镜虽然可以实现超过180°的超大视场成像,但其存在较大畸变,整个像面上无法形成一致分辨率[2]; 环带凝视成像系统将围绕光学系统光轴360°范围的圆柱视场投影到二维平面上的环形区域内,虽然可以实现360°环带空间的全景实时成像[3],但只能对环带视场成像,成像系统存在中心盲区,系统的杂散光严重[4],分辨率大打折扣。
为了解决这个问题,一种以萨顿全景镜头和贝克球镜[5]为代表的单心光学成像系统得到了应用,其系统结构如图1所示。该系统完全对称,光学系统各球面同心,没有与视场相关的像差,容易实现大视场。如果能将这种光学成像系统引入空间光学遥感器的设计中,无疑能为未来大视场高分辨率的空间光学遥感器设计提供一种新思路。但是单心成像系统也存在着缺陷,由于只采用单心球镜结构,系统存在着较大的球差和色差; 其像面为球面,如果采用曲面探测器则可以较好地匹配光学系统,但基于目前曲面探测器的发展状况,实现球形像面的困难较多。针对上述问题,本文将研究单心光学成像系统的一种衍生模型——多尺度单心光学系统[6],并对其设计原理进行研究,为多尺度单心光学系统的设计提供支持。
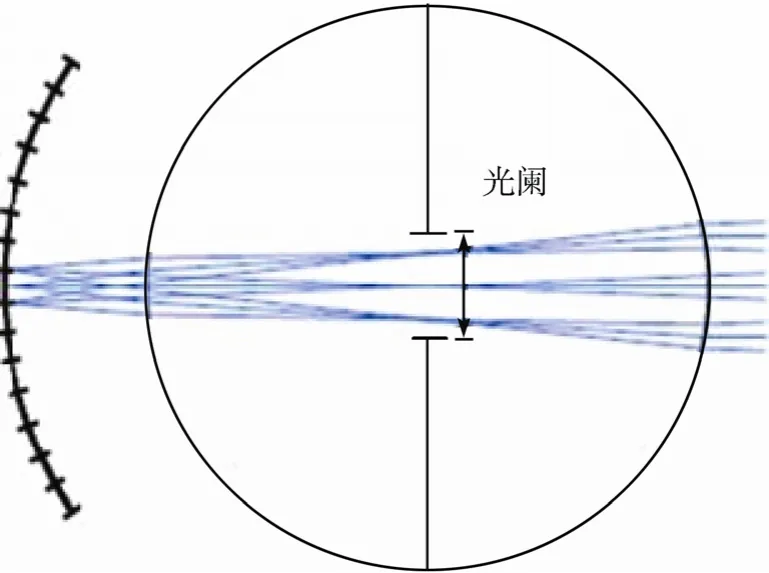
图1 单心光学成像系统结构Fig.1 The structural representation of moncentric optical system
2 多尺度单心光学系统及其设计原理
2.1 多尺度单心光学系统
多尺度单心光学成像系统如图2所示,该系统采用单心光学系统作为主光学系统,在距离主光学系统(单心光学成像系统)像平面一定距离处设置小口径次级光学系统,利用小口径透镜校正波面的能力比大口径透镜强的特点进一步校正主光学系统的残余像差[7]; 前端的主光学系统只作为光能收集系统而不设置光阑,各子光路的光阑放置在次级光学系统中,通过多个子光路的叠加实现大视场,从而解决了传统大视场光学系统存在边缘照度降低的缺点; 同时,通过调整次级光学系统的参数改变其放大率,从而使各相邻子视场之间存在重叠,并缩小了系统探测器的规模。多尺度单心光学成像系统继承了单心光学系统的优点,由于主光学系统旋转对称,所以各次级光学系统完全相同,全视场具有一致分辨率。
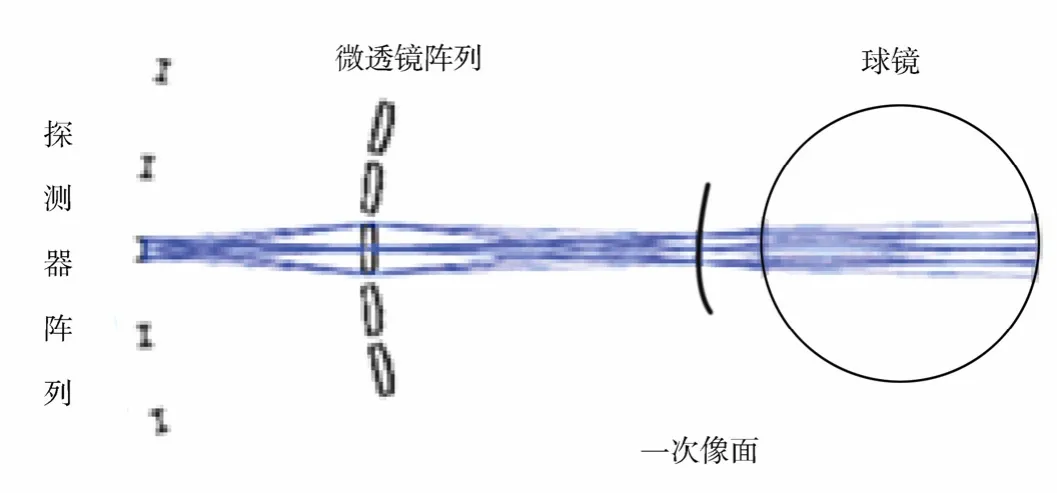
图2 多尺度单心光学成像系统结构Fig.2 The structural representation of multiscale moncentric optical system
在多尺度单心光学系统的设计过程中,必须注意以下几点:
1)在主光学系统设计中,对单心结构主镜进行优化,从而减轻次级光学系统进一步校正像差的压力;
2)在次级光学系统设计中,在提高像质的前提下调整次级光学系统的结构参数,使得相邻视场存在重叠。
2.2 多尺度单心光学系统的设计原理
由于多尺度单心光学系统的主光学系统采用了单心结构,因此存在较大的球差与色差,在主光学系统的设计过程中,在单心球镜结构的基础上,使用不同类型的玻璃进行组合来校正球差与色差,从而降低了次级光学系统的设计难度; 主光学系统中不设置光阑,只作为光能收集系统,这就解决了传统大视场成像系统边缘照度降低的问题。
次级光学系统在多尺度单心光学成像系统中的作用主要有: 1)小口径透镜校正波面的能力比大口径透镜强,可以进一步校正主光学系统存在的残余像差; 2)作为中继镜保证相邻子光路视场存在重叠,方便探测器阵列排布以及后期图像的配准复合。因此,在次级光学系统的设计过程中,需要对子光路视场重叠进行分析。
光学系统的视场取决于探测器的规格化敏感面尺寸和透镜的焦距。一般情况下,镜头对无穷远成像时,从镜头像方主点到画幅对角线的张角称为镜头的像场角。

式中θ为镜头的像场角;d为有效像场(探测器实际感光面)的对角线长;f为镜头的焦距。
从镜头的光心到所摄景物边缘所能记录的景物范围称为有效视场。间隔一定距离的相机对同一个方向取景时,其视场重叠情况如图3所示。图中,P为2个相机透镜间的距离,2个透镜的光轴平行;l为物距。相机1所能记录的视场如图3中“场景1”所示,相机2所能记录的视场如图中“场景2”所示。a、b、c分别为场景的长、宽及对角线长;Q为2个相机视场重叠区域的宽。
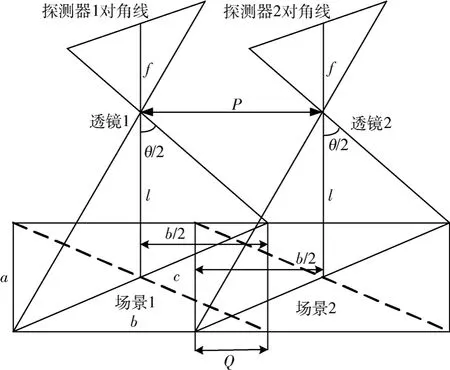
图3 视场重叠分析Fig. 3 The analysis of overlapped field of view
传统的探测器长宽比为4︰3,即像场长宽比为4︰3,则根据相似形原理,视场的长宽比亦为4︰3,根据勾股定理得a︰b︰c为3︰4︰5,从而可得


假设P>Q(即Q<b/2),由图3得

当Q>b/2时上述结论不变,即相机的视场角、物距及相邻2个相机的间距一定时,其重叠比例也一定。
在本文设计的多尺度单心光学系统中,次级光学系统放置在主光学系统后充当中继镜的作用,根据物象共轭关系,当次级光学系统焦距和探测器实际感光面的对角线长一定时,只要通过调整次级光学系统的物距改变其系统放大率β(β<1),就能使相邻次级光学系统对主光学系统一次像面所成的像存在一定重叠。此时,重叠区域Q为

由式(5)可知,为了保证次级光学系统所成的像对应的主光学系统一次像面存在重叠,在次级光学系统的设计中必须考虑探测器感光面对角线长d、放大率β以及相邻次级光学系统之间的距离P三者的关系。
例如,采用尺寸为1/4英寸(3.6 mm×2.7 mm)的探测器,在次级光学系统密集排布的前提下,假设次级光学系统口径为5 mm,则根据式(5),放大率β<0.72即可使相邻次级光学系统所成的像存在重叠。
3 多尺度单心光学成像系统的设计实例
3.1 主光学系统的设计
主光学系统结构采用单心光学系统,使用多种不同类型的玻璃组合来校正球镜像差,设计的系统参数为: 谱段480~650 nm,焦距70 mm,视场角为120°,优化后的光学系统光路图如图4所示。此系统中,为了单独评价主光学系统的成像质量,设置了光阑以控制其F数。但实际在主光学系统中并不设置任何光阑。
设置光阑后,主光学系统调制传递函数(MTF)曲线图如图5所示。从图中可以看到,主光学系统成像质量直到空间频率200线对/mm处仍然具有较好的性能,不同视场之间的MTF基本一致,这大幅降低了次级光学系统的设计难度。
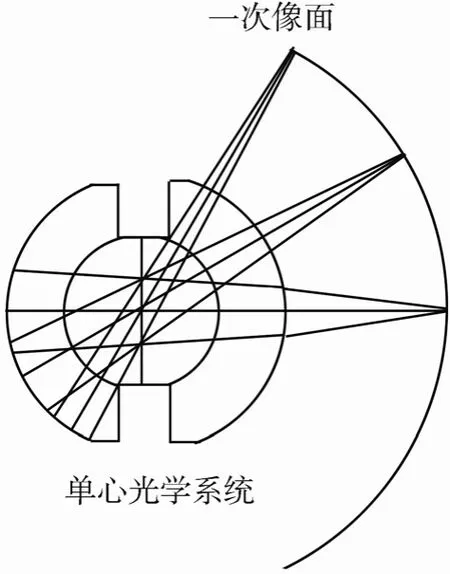
图4 主光学系统光路图Fig. 4 The optical layout of primary optical system
3.2 次级光学系统的设计
次级光学系统结构采用改进的望远镜结构控制系统放大率(放大率为前后2组透镜焦距之比); 利用2组不同焦距的消色差透镜组进一步优化光学系统像质。为了实现大视场,多尺度单心光学成像系统常需要成百个微透镜组组成阵列。为了方便微透镜组的制造,在设计过程中选用了可以使用模压工艺批量生产的光学材料(PMMA和POLYCARB)[8-9]。次级光学系统参数为: 谱段480~650 nm,口径5 mm,放大率β=0.63,其光路图如图6所示。
根据式(5),次级光学系统的放大率β=0.63小于0.72的设计要求,该光学系统采用尺寸为1/4英寸(3.6 mm×2.7 mm)的探测器,次级光学系统口径为5 mm,经计算可得相邻次级光学系统所成像存在12.5%的重叠。每个次级光学系统对应物方视场角4.6°的视场,考虑到相邻视场间的重叠,只要30个紧密排布的次级光学系统就能实现全视场120°的视场且整个视场照度均匀,全视场具有一致分辨率。

图5 单心光学系统MTF曲线Fig.5 The MTF curve of moncentric optical system

图6 次级光学系统光路图Fig.6 The optical layout of secondary optical system
3.3 多尺度单心光学系统的设计
将2级光学系统进行组合形成多尺度单心光学系统,子光路光路图和光学系统概念图分别如图7(a)和7(b)所示,子光路光学系统参数为: 谱段480~650 nm,焦距44 mm,F数3.6,视场4.6°。
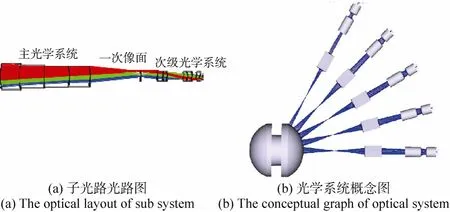
图7 多尺度单心光学系统设计结果Fig.7 The result of multiscale moncentric optical design
子光路的MTF曲线如图8所示,如使用像元尺寸为7 μm的探测器,光学系统在探测器纳奎斯特频率(71线对/mm)处的MTF接近衍射极限,像元最大光斑的均方根尺寸为2.2 μm,小于探测器像元尺寸7 μm,满足设计要求。
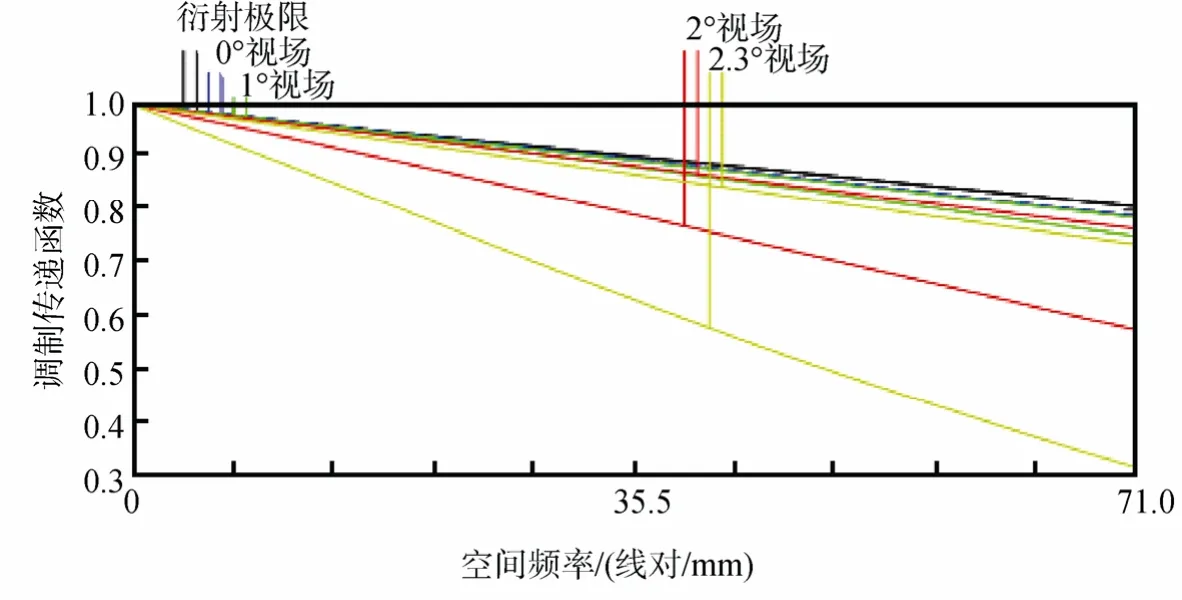
图8 子光路MTF曲线Fig.8 The MTF curve of subsystem
由于每个子光路都完全相同,全视场具有一致分辨率,因此整个光学系统的畸变率与子光路畸变率均为0.8%,远低于传统广角镜头的畸变率。实际上,采用多尺度单心光学系统这种结构形式,通过子光路拼接实现大视场,由于每个子光路的视场相同且数值较小,使得整个系统的畸变校正难度大幅降低。
4 结束语
本文介绍的光学成像系统对未来超大视场小畸变空间相机的设计具有一定借鉴意义,由于采用了透射式光学系统,目前国外只将其用于高度较低的军事侦察领域,如无人机航空监视,因此,今后还需开展长焦距的多尺度单心光学系统的研究工作。如果此项关键技术问题能够解决,多尺度单心光学成像系统不仅将在平流层空中目标监视[10],而且将在空间目标大范围搜索与监视、空间站安全防护等领域得到广泛地应用,同时也将带动我国新型空间成像技术的发展。
References)
[1] Wang S, Heidrich W. The Design of an Inexpensive Very High Resolution Scan Camera System[J]. Computer GraphicsForum,2004, 23(3): 441–450.
[2] 王永仲. 鱼眼镜头光学[M]. 北京: 科学出版社, 2006: 18–21.WANG Yongzhong. Optics of Fisheye Lens[M]. Beijing: Science Press, 2006: 18–21.(in Chinese)
[3] 肖潇, 杨国光.全景成像技术的现状和进展[J]. 光学仪器, 2007, 29(4): 84–89.XIAO Xiao, YANG Guoguang. A Present and Development of Panoramic Imaging Technique[J]. Optical Instruments, 2007,29(4): 84–89.(in Chinese)
[4] 程惠全, 姚炜勇, 杨国光, 等.全景环形成像的转像系统设计[J].光电工程, 2002, 29(2): 16–19.CHENG Huiquan, YAO Weiyong, YANG Guoguang, et al. Design of an Image Transferring System Used for Panoramic Annular Imaging [J]. Opto-Electronic Engineering, 2002, 29(2): 16–19. (in Chinese)
[5] Kingslake R. A History of the Photographic Lens[M].USA:Academic Press, 1989: 50–55.
[6] Brady D J, Hagen N. Multiscale Lens Design[J].USA: Opt. Express, 2009,17(13): 59–74.
[7] Rim S, Catrysse P, Dinyari R, et al.The Optical Advantages of Curved Focal Plane Arrays[J]. Proc.SPIE, 2005, 78(4): 48–58.
[8] Marks D, Brady D.Close-up Imaging Using Microcamera Arrays for Focal Plane Synthesis[J]. Opt Eng, 2011, 50(3): 51–61.
[9] Schaub M P. The Design of Plastic Optical Systems[M].Bellingham:SPIE, 2009: 10–15.
[10] Darpa: Darpa at 50. [EB/OL].[2010].www.darpa.mil/Docs/1-25013846 Eprint 200811141152151.pdf
